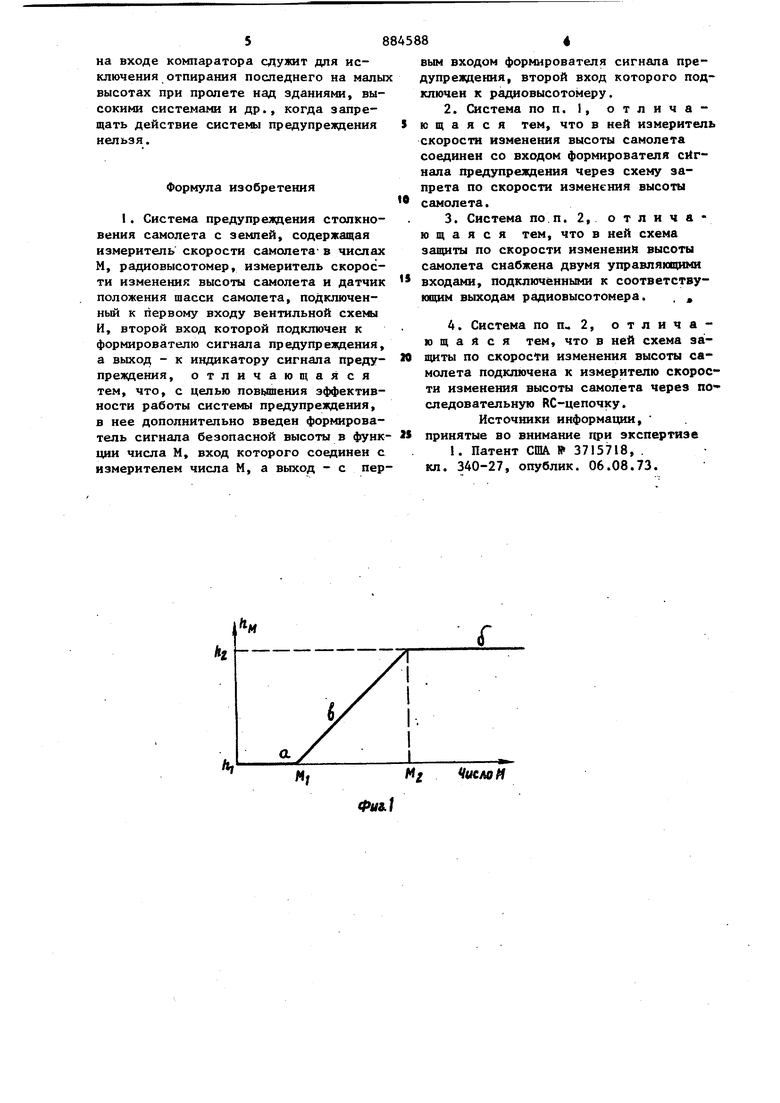
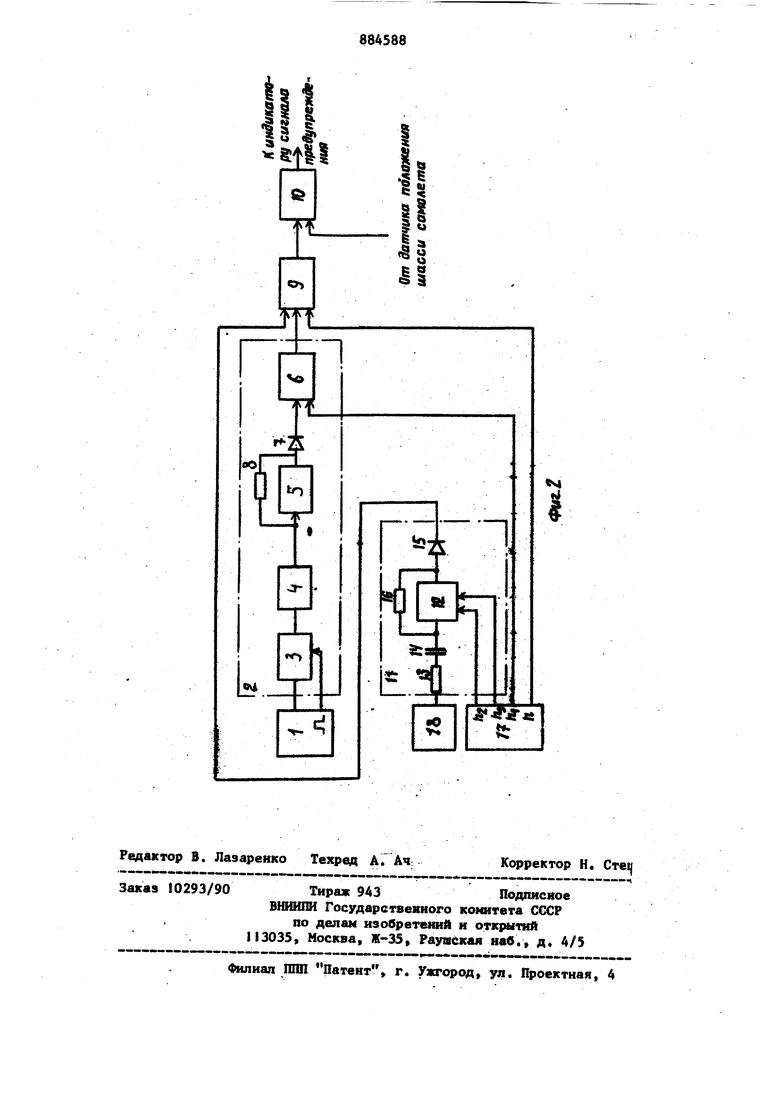
Причем схема защиты по скорости изменения высоты самолета снабжена двумя управляющими входами, подключенными к соответствуклцим выходам радиовысотомера. Схема защиты по скорости изменения высоты самолета подключена к измерителю скорости изменения высоты самолета через последовательную RC-цепочку. На фиг. 1 приведен график зависимости минимально допустимой высоты полета от скорости самолета; на фиг. 2 - блок-схема системы. На графике зависимости, приведённо на фиг. 1, обозначены два участка Q и (У , которые характеризуют минимально допустимую высоту полета h. , и высоту полета Нл выше которой скорость полета не лимитируется. Участок -в характеризуется линейной зависимостью допустимой величины полетаот скорЬст В состав системы предупреждения столкновения самолета с землей (фиг. 2/ входят: измеритель 1 числа М полета, формирователь 2 сигнала безопасной высоты Б функции числа М, включающий буферный усилитель 3, канальный переключатель 4, усилитель 5, сумматор 6, диод 7 и резистор SQ, формирователь 9 сигнала предупрелдчения, вентильная схема И 10, схема 11 запре та по скорости изменения высоты самолета, включакицая компаратор 12, резис тор 13, конденсатор 14, диод 15, и ре зистор 16, а также радиовысотомер 17 и измеритель 18 скорости изменения высоты самолета. Система работает следующим образом Напряжение, пропорциональное числу М, с измерителя 1 числа М полета пост пает на вход формирователя 2 сигнала безопасности высоты, состоящего из буферного усилителя 3, канального переключателя 4, усилителя 5, сумматора 6, в результате чего на выходе сумматора 6 имеется сигнал, пропорциональный числу М. На второй вход сумматора подается сигнал с радиовысотомера 17, соответствующий значению высоты h. , в результате чего выходной сигнал суммато ра 6 при скорости полета, соответству ющей числу М менее М, характеризуется горизонтальной .линией (фиг. I.), При скорости полета более М выходной сигнал усилителя 5 суммируется с сигналом высоты полета h в сумматоре 6, который затем подается на первый вход формирователя 9 предупредительного сигнала, выполненного в виде компаратора, на второй вход которого поступает сигнал с радиовысотомера 17, характеризующий истинную высоту полета h. В компараторе оба эти сигнала сравниваются, и при превышении вычислительной минимально допустимой высоты полета истинной компаратор 12 формирует предупредительный сигнал, Ki.roрый подается на вход вентильной схемы И 10. Другим входным сигналом вентильной схемы И 10 является сигнал от дат чика положения шасси самолета, который при посадке, когда щасси выпущены, не позволяет выдавать сигнал предупреждения. Для исключения выдачи ложных предупредительных сигналов при полете самолета над нижелетящими летательными аппаратами система снабжена схемой 11 запрета по скорости изменения высоты самолета, соединенной с измерителем 18 скорости изменения высоты самолета, формирующей сигнал. (Этот сигнал может генерироваться путем дифференцирования сигнала с радиовысотомера по времени) . Сигнал h вводится в усилитель, работакщий в режиме компаратора через резистор 13 и конденсатор 14, при этом компаратор имеет пороговую характеристику с порогом отпирания, соответствующим скорости изменения высоты, определяемой радиовысотомером, в режиме пролета над нижелетящими летательными аппаратами. Отпертый компаратор генерирует сигнал, который через диод 15 подается на вход формирователя 9, при этом его величина выбирается такой, что подавляет любые другие сигналы на его входе и предот-. вращает действие системы предупреждения. Цепь обратной связи, содержащая резистор 16, служит для того, чтобы держать компаратор в отпертом состоянии, поддерживая тем самым систему предупреждения в запрещенном режиме. Схема 11 запрета снабжена двумя входами для перевода компаратора в исходкое состояние: первый - переводит компаратор в закрытое состояние, когда высота полета более h л(после пролета нижелетящего летательного аппарата), второй - когда высота будет менее h«, соответствующей заданной минимальной высоте на этапе взлета. RC-цепочка на входе компаратора сдужит для исключения отпирания последнего на малы высотах при пролете над зданиями, высокими системами и др., когда запрещать действие системы предупреждения нельзя. Формула изобретения . Система предупреждения столкновения самолета с землей, содержащая измеритель скорости самолетав числах М, радиовысотомер, измеритель скорости изменения высоты самолета и датчик положения шасси самолета, подключенный к первому входу вентильной cxei« i И, второй вход которой подключен к формирователю сигнала предупрехздения, а выход - к индикатору сигнала предупреждения, отличающаяся тем, что, с целью повышения эффективности работы системы предупреждения, в нее дополнительно введен формирователь сигнала безопасной высоты в функ ции числа М, вход которого соединен с измерителем числа М, а выход - с пер 84 вым входом формирователя сигнала предупреждения, второй вход которого подключен к радиовысотомеру. 2.Система по п. 1, отличающаяся тем, что в ней измеритель скорости изменения высоты самолета соединен со входом формирователя сигнала предупреждения через схему запрета по скорости изменения высоты самолета. 3.Система по, п. 2, отличающаяся тем, что в ней схема за11р1ты по скорости изменений высоты самолета снабжена двумя управляющими входами, подключёнными к соответству Ю1ЦИМ выходам радиовысотомера. . 4. Система , отличаю щ а и с я тем, что в ней схема saiщиты по скорости изменения высоты самолета подключена к измерителю скорости изменения высоты самолета через по- следовательную RC-цепочку. Источники информации, принятые во внимание т(ри экспертизе 1. Патент США № 3715718, . кл. 340-27, опублик. 06.08.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система предупреждения | 1976 |
|
SU797615A3 |
| Система предупреждения столкновения самолета с землей | 1976 |
|
SU627771A3 |
| Устройство для определения скорости вращения сельсина | 1976 |
|
SU688147A3 |
| Устройство для смещения и масшта-биРОВАНия СигНАлОВ изМЕРиТЕльНОгОпРЕОбРАзОВАТЕля | 1978 |
|
SU854282A3 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ АВИАГОРИЗОНТА В ПИЛОТАЖНЫЙ КОМПЛЕКС | 2002 |
|
RU2213938C1 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНОМ УГЛЕ ТАНГАЖА ДЛЯ УЛУЧШЕННОЙ СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ С ЗЕМЛЕЙ (УСПОС) | 2002 |
|
RU2282157C2 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
а
W;
f
Числен
Mf
Ц
