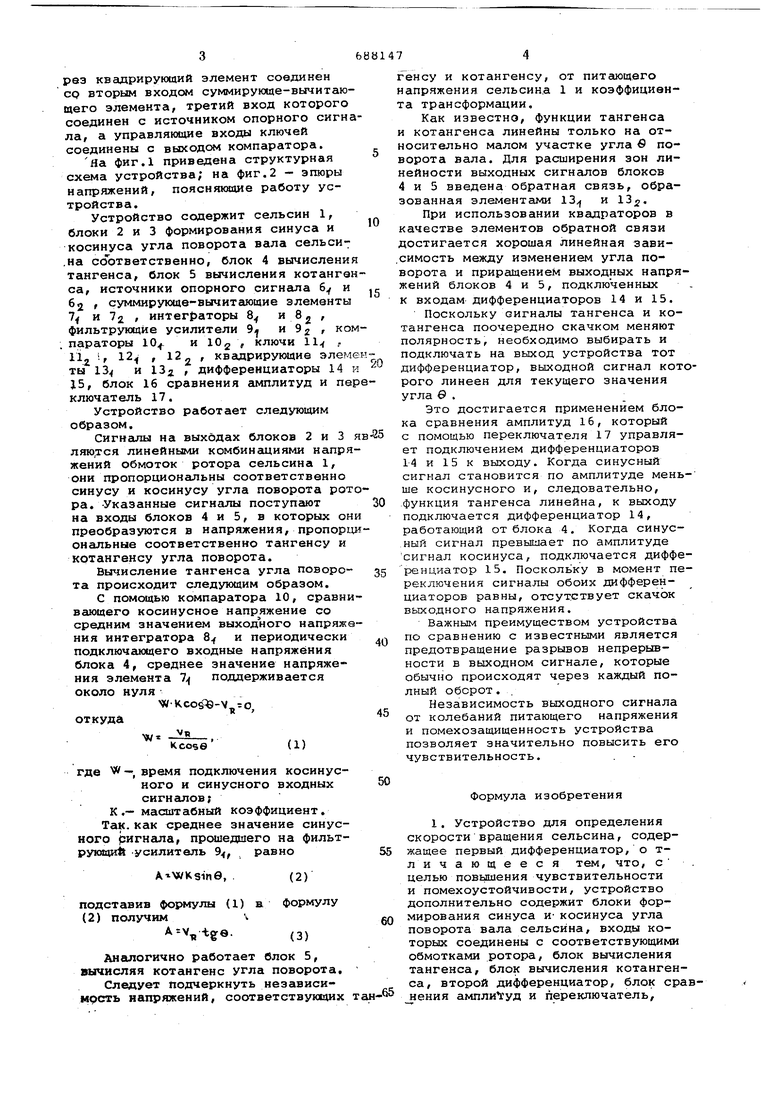
(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ СЕЛЬСИНА рез квадрирующий элемент соединен ср вторым входом суммирующе-вычитаю щего элемента, третий вход которого соединен с источником опорного сигн ла, а управляющие входы ключей соединены с выходом компаратора. На фиг.1 приведена структурная схема устройства; на фиг.2 - эпюры напряжений, пояснякяцие работу устройства. Устройство содержит сельсин 1, блоки 2 и 3 формирования синуса и косинуса угла поворота вала сельси ,на ссютветственно, блок 4 вычислени тангенса, блок 5 вычисления котанге са, источники опорного сигнала 6 и 62 I суммирующе-вычитающие элементы 7 и 7 , интег{5аторы 8 и 8 , фильтрующие усилители 9 и Qj , к параторы 10 и 102 , ключи 11 f 11J 1, 12 , 12 2 г квадрирукядие элем ты 13 и 13 f дифференциаторы 14 15, блок 16 сравнения ё1мплитуд и п ключатель 17. Устройство работает следующим образом. Сигнёшы на выходах блоков 2 и 3 ляю,тся линейными комбинащиями напр жений обмоток ротора сельсина 1, они пропорциональны соответственно синусу и косинусу угла поворота ро ра. -Указанные сигналы поступают на входы блоков 4 и 5, в которых о преобразуются в напряжения, пропор ональные соответственно тангенсу и котангенсу угла поворота. Вычисление тангенса угла поворо та происходит следующим образом. С помощью компаратора 10, сравн вающего косинусное напряжение со средним значением выходного напряж ния интегратора 8 и периодически подключающего входные напряжения блока 4, среднее значение напряжения элемента 1 поддерживается около нуля W-Kcos -V ro, откуда VB к cose где W - время подключения косинусного и синусного входных сигналов; К.- масштабный коэффициент, Так. как среднее значение синусного ригнала, прошедшего на фильтрукяций усилитель 9, равно A WKsine, подставив формулы (1) н формулу (2) получим V Аналогично работает блок 5, вычисляя котангенс угла поворота. Следует подчеркнуть независиMQCTb напряжений, соответствующих генсу и котангенсу, от питающего напряжения сельсин.а 1 и коэффициента трансформации. Как известно, функции тангенса и котангенса линейны только на относительно малом участке угла в поворота вала. Для расширения зон линейности выходных сигналов блоков 4 и 5 введена обратная связь, образованная элементами 13 и IS. При использовании квадраторов в качестве элементов обратной связи достигается хорошая линейная зависимость между изменением угла поворота и приращением выходных напряжений блоков 4 и 5, подключенных к входам дифференциаторов 14 и 15. Поскольку сигналы тангенса и котангенса поочередно скачком меняют полярность, необходимо выбирать и подключать на выход устройства тот дифференциатор, выходной сигнал которого линеен для текущего значения угла & . Это достигается применением блока сравнения амплитуд 16, который с помощью переключателя 17 управляет подключением дифференциаторов 14 и 15 к выходу. Когда синусны:й сигнал становится по амплитуде меньше косинусного и, следовательно, функция тангенса линейна, к выходу подключается дифференциатор 14, работающий от блока 4. Когда синус.ный сигнал превышает по амплитуде сигнал косинуса, подключается дифференциатор 15. Поскольку в момент переключения сигналы обоих дифференциаторов равны, отсутствует скачок выходного напряжения. Важным преимуществом устройства по сравнению с известными является предотвращение разрывов непрерывности в выходном сигнале, которые обычно происходят через каждый полный оборот. . Независимость выходного сигнала от колебаний питающего напряжения и помехозащищенность устройства позволяет значительно повысить его чувствительность. Формула изобретения 1. Устройство для определения скорости вращения сельсина, содержащее первый дифференциатор, о тличающеес я тем, что, с . целью повышения чувствительности и помехоустойчивости, устройство дополнительно содержит блоки формирования синуса и- косинуса угла поворота вала сельсина, входы которых соединены с соответствующими обмотками ротора, блок вычисления тангенса, блок вычисления котангенса, второй дифференциатор, блок сравения амплитуд и переключатель. выход блока формирования си са угла поворота вала сельсина соединен с первым входом блока вычисления тангенса и со вторым вход блока вычисления котангенса, выход блока формирования косинуса угла поворота вала сельсина соединен с nepBfcw входом блока вычисления котангенса и со вторым входом блок вычисления тангенса, вход первого дифференциатора соединен с выходом блока вычисления тангенса, вход второго дифференциатора соединен с выходом блока вычисления котангенса выходы дифференциаторов связаны с выходом устройства через переключатель, управляющий вход которого подключен к выходу блока сравнения амплитуд, соответствующие входы которого подключены к выходам блоков формирования синуса и косинуса угла поворота вала сельсина. 2. Устройство поп.1,отлиV а„ю щ е е с я тем, что каждый блок вычисления тангенса и котАнгенса содержит последовательно соединенные суммирующе-вычитающий элемент, интегратор и компаратор, другой вход которого является первым входом блока и соединен через первый ключ с первым входомсуммирующе-вычитающего элемента, второй вход блока через второй клпч соединен со входом фильтрующего усилителя, выход которого является выходом блока и через квадрирутаций элемент соединен со вторым входом суммируквде-вычитающего элемента, третий вход которого соединен с источником опорного сигнала, а управляющие входы ключей соединены с выходом компаратора. Источники информации, принятые во внимание при экспертизе 1. Арендт В.Р. и Сэвент Дж.К., Практика следящих систем. М., Госэ энергоиэдат, 1960, сЛ11-112 (прототип .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования синусно-косинусного трансформаторного датчика угла | 1990 |
|
SU1778766A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1690198A2 |
| Функциональный преобразователь угла поворота вала в код | 1989 |
|
SU1697266A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| Способ преобразования угла поворотаВ НАпРяжЕНиЕ | 1978 |
|
SU807051A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ КУРСОВЕРТИКАЛИ И ДАТЧИКОВ УГЛОВЫХ СКОРОСТЕЙ | 1997 |
|
RU2122230C1 |
| Преобразователь угла поворота вала в код | 1975 |
|
SU526933A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Многоканальный преобразователь угла поворота вала в код | 1983 |
|
SU1120383A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ ВЕРТИКАЛИ И ДАТЧИКОВ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2106006C1 |

,L- HC05Bl lSIN l
Фчг2
