Изобретение относится к регуляторам замкнутых систем с кусочно-постоянным управлением, обеспечивающим изменение знака управлякщего воздействия при состояниях системы, определяемых гиперповерхностями переключения.
Известен регулятор, реализующий управления при отсутствий информации о некоторых переменных состояниях объекта, в котором используются устройства запоминания экстремума 1 и 2.
Однако данный регулятор.характеризуется недостаточной точностью и сложностью.
Наиболее близким к предлагаемому является релейный регулятор, содержащий последовательно соединенные . функциональный преобразователь, релейный элемент и исполнительное устройство, причем каждый из к входов функционального преобразователя соединен с выходом соответствуквдего датчика состояния объекта З .
Недостатком известного регулятора является требование наличия информации об п переменных состояниях. При наличии к датчиков точность реализации оптимального управления зависит от возможности редуцировать уравнения движения объекта управления до Уравнения к-го порядка. При отсутствии такой возможности известным регулятором нельзя реализовать оптимальные управления.
Кроме того, введение в регулятор между к датчиками и функциональным преобразователем наблюдателя существенно усложняет регулятор, так как в некоторых случаях реализация- наблюдателя возможна лишь на базё применения цифровых вычислительных ма. шин.
Цейью изоберетения является повышение точности и расширение функциональных возможностей регулятора.
Поставленная цель достигается тем, что регулятор содержит последовательно соединенные временной селетор экстремума и интегратор, соединенный выходом с (k+l)-M входом функционального преобразователя, певый вход которого подключен к входу временного селектора экстремума.
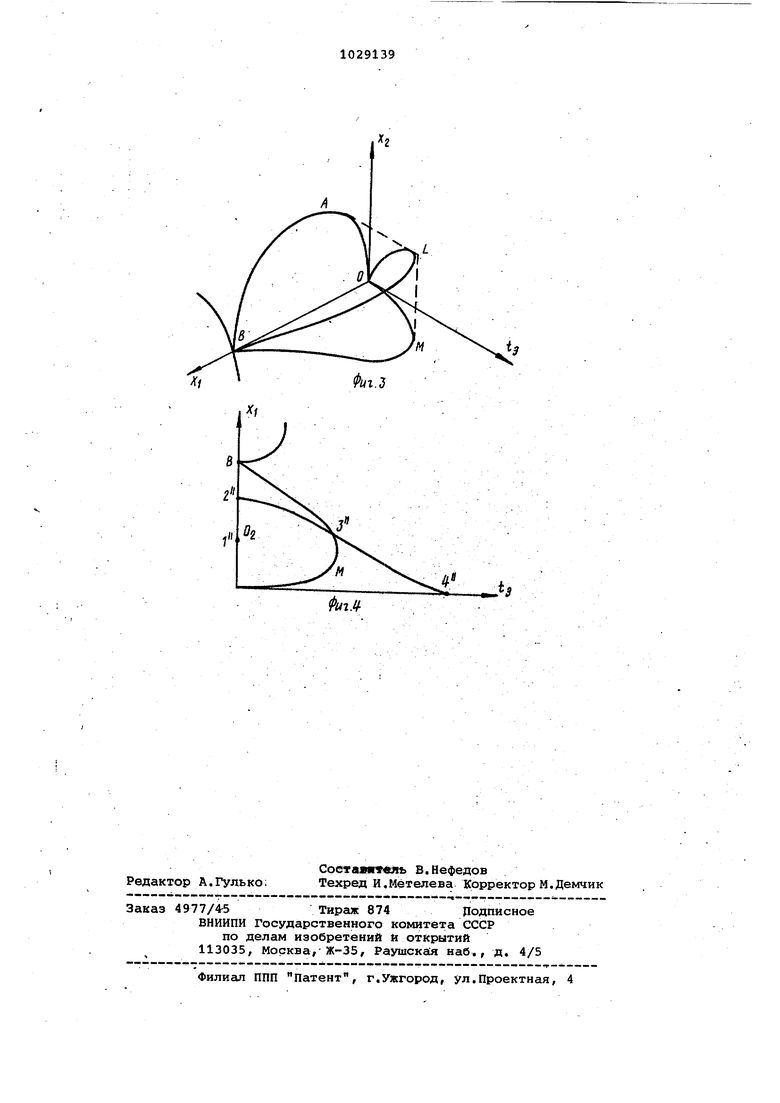
На фиг. 1 изображена блок-схема регулятора; на фиг. 2 - 4-линии пepeключения в переменных состояниях соответственно х,Х2, для объекта управления, представляемого колебательным звеном.
Регулятор содержит датчики 1 состояния объекта, функциональный преобразователь 2, релейный элемент 3, исполнительное устройство 4, временной селектор 5 экстремума и интегратор 6.
Регулятор работает следующим образом.
Вводится еще одна ось измерения tj в пространство состояний и повышается .его размерность до к+2. 5 Этой осью t, является ось времени, причем нуль отсчета времени совмещен с экстремальной точкой траектории приведения по переменной х , т.е. за цулъ отсчета времени взят момент,
0 когда фазовая траектория оптимального движения проходит гиперплоскость экстремумов одной из переменных состояния, в частности момент экстремума сигнала х. Затем определяется
5 положение к-мерной гиперповерхностиоптимального переключения уже в (k+2)-M мерном пространстве (х ,..., k+2 э проектируется гиперповерхX. ность оптимального переключения на
0 (k+1 )--мерное подпространство (х,..., 1с.1 ) э Таким образом получается к-мерная гиперповерхность переключения в (k+1)-мерном подпространстве, размерность которого определяется по количеству сигналов х ,.., x,j, и tg . Гиперповерхность переключения реализуется в функциональном . преобразователе зависимостью
т V J F . / t 3 / О
Реализация этой гиперповерхности требует постановки на объект управления датчиков и дополнительной обработки- сигналов с целью получения tg.
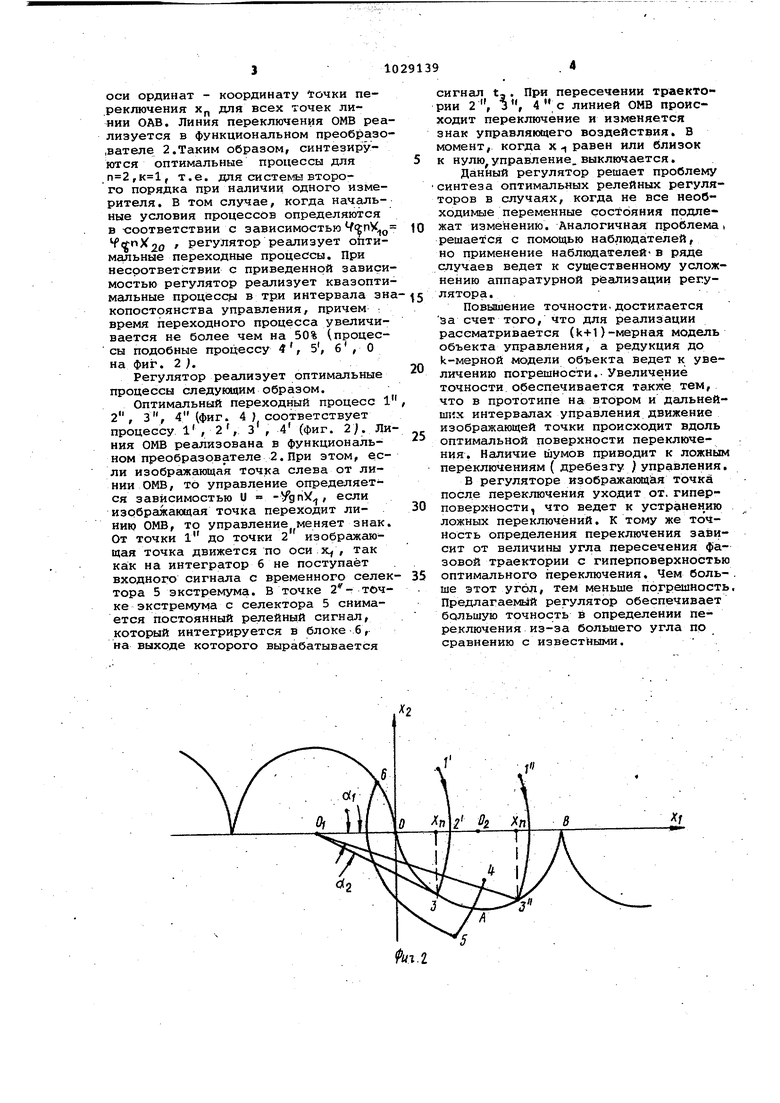
Далее для наглядности рассмотрим 5 работу регулятора в случае колебательного объекта второго порядка без демпфирования. На фиг. 2 приведена линия оптимального переключения в пространство параметров х 0 и Хд/ которые определяются урайнениями
ГХ Х2
(Х2 - Х + U,
где U - управляющее воздействие.
5 На борту имеем датчик переменной х , отсутствие возможности измеренид переменной Х2 и дифференцирования сигнала х. На фиг. 2 цифрами 1 , 2, 3, О показаны оптимальные переходные процессы. Изобразим линию переключения ОАВ в трехмерном пространстве х, х, t (линия OLB на фиг. 3 , где за начало отсчета времени t BOSbMeM экстремальные точки оптимальной траектории по переменной х -,- точки 2. В рассматриваемом случае время t - время от момента экстремума до момента переключения пропорционально углу о. Спроекти0 РУем линию OLB на плоскость . Получаем линию ОМВ, крторую выносим на.отдельный рисунок (фиг. 4). Линию ОМЕ можно получить, если по оси абцисс откладывать величины, пропорциональные углу (t,:-Lot) , а по
jV 2Л / оси ординат - координату точки переключения Хр для всех точек линии ОАВ, Линия переключения ОМВ реа лизуется в функциональном преобразо .вателе 2.Таким образом, синтезируются оптимальные процессы для ,, т.е. для системы второго порядка при наличии одного измерителя. В том случае, когда начальные условия процессов определяются в -соответствии с зависимостью 4jnX,Q t регулятор реализует оптимальные переходные процессы. При несоответствии с приведенной зависи мостью регулятор реализует квазопти мальные процессы в три интервала зн копостоянства управления/ причем : время переходного процесса увеличивается не более чем на 50% (процессы подобные процессу 4, 5, 6 , О на фиг. 2 ). Регулятор ресшизует оптимгшьные процессы следующим образом. Оптимальный переходный процесс 2, 3, 4 (фиг. 4) соответствует 4 (фиг. 2). Ли процессу 1 ния ОМВ реализована в функциональном преобразователе 2 . При этом, ес ли изображающая точка слева от линии ОМВ, то управление определяется зависимостью U -УдпУ, если изображающая точка переходит линию ОМВ, то управление меняет знак От точки 1 до точки 2 изображающая точка движется по оси.х, так ка:к на интегратор 6 не поступает входного сигнала с временного селе тора 5 экстремума. В точке 2- точ ке экстремума с селектора 5 снимается постоянный релейный сигнал, который интегрируется в блоке б, на выходе которого вырабатывается сигнал tj. При пересечении траектории 2, з, 4 с линией ОМВ происходит переключение и изменяется знак управляющего воздействия. В момент, когда х-i равен или близок к нулю, управление, выключается. Данный регулятор решает проблему синтеза оптимальных релейных регуляторов в случаях, когда не все необходимые переменные состояния подлежат изменению. Аналогичнаш проблема решается с помощью наблюдателей, но применение наблюдателей- в ряде случаев ведет к существенному усложнению аппаратурной реализации регулятора. Повышение точности.достигается за счет того, что для реализации рассматривается (k+1)-мерная модель объекта управления, а редукция до k-мерной модели объекта ведет к увеличению погрешности.-Увеличе ниё точности обеспечивается также тем, что в прототипе на втором и дальнейших интервалах управления движение изображающей точки происходит вдоль оптимальной поверхности переключения. Наличие шумов приводит к ложным переключениям ( дребезгу JI управления. В регуляторе изображающ&я точка после переключения уходит от. гиперповерхности, что ведет к устранению ложных переключений. К тому же точность определения переключения зависит от величины угла пересечения фазовой траектории с гиперповерхностью оптимального переключения. Чем боль- . ше этот угол, тем меньше погрешность, Предлагаемый регулятор обеспечивает большую точность в определении переключения из-за большего угла по сравнению с известными.
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1980 |
|
SU900257A1 |
| Релейный регулятор | 1980 |
|
SU900258A1 |
| Релейный регулятор | 1980 |
|
SU885971A1 |
| Релейный регулятор | 1978 |
|
SU765782A1 |
| Релейно-линейный регулятор | 1981 |
|
SU1012200A1 |
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Устройство для решения задач нелинейного программирования | 1974 |
|
SU477428A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Система оптимального управления объектом второго порядка | 1977 |
|
SU651308A1 |
| Электропривод постоянного тока | 1986 |
|
SU1394385A1 |
РЕЛЕЙНЫЙ РЕГУЛЯТОР, содержащий последовательно соединенные Функциональяый преобразователь, релейный элемент и исполнительное устройство f причем.каждый из к входов функционального преобразователя соединен с выходом соответствующего датчика состояния объекта, о т л ич а ю щ и и с я тем, что, с целью повышения точности и. расширения функциойальных возможностей регулятора, он содержит последовательно соединенные временной селектор экстремума и интегратор, соединенный выходом с (k+1)-м входом функционального преобраэрвателя, первый вход которого подключен к входу временного сбл ектора экстремума. (Л tsO « ОО СО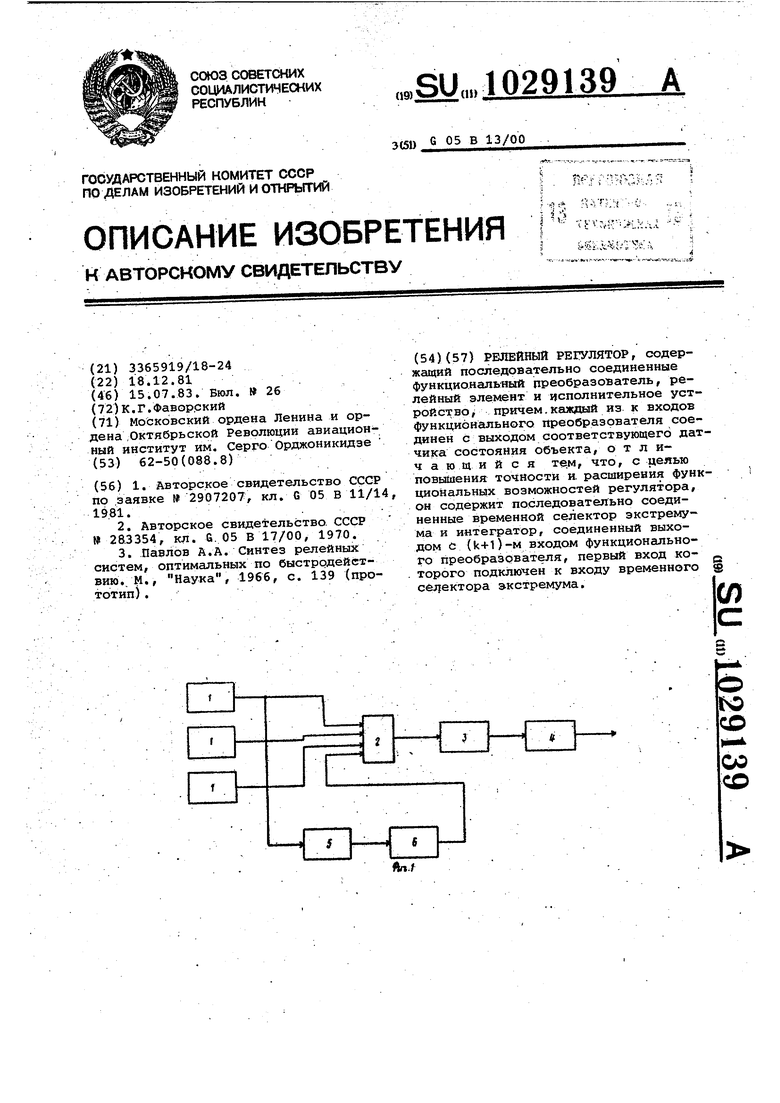
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке №2907207, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| S | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Синтез релейных систем, оптимальных по быстродейетвию., М., Наука, 1966, с | |||
| Способ подпочвенного орошения с применением труб | 1921 |
|
SU139A1 |
