Изобретение относится к регулирующим устройствам автоматики, к оптимальным релейным системам управления, а также к регуляторам замкнутых ( .систем с кусгчно постоянным управлением, обеспечивающим изменение знака управляющего воздействия при состояниях системы, определяемых гиперповерхностями переключения.
Известен релейный оптимальный регулятор для объекта и -го порядка, содержащий и датчиков информации о переменных состояния и и преобразователей переменных состояния, (Л-1) координатный функциональный преобразователь и двухвходовой компаратор, причем выходы всех датчиков связаны со входами всех преобразователей переменных состояния, выходы которых, первого напрямую, а последующие через функциональный преобразователь, связаны со входами компаратора 1.
Наиболее близким по технической сущности к предлагаемому является релейный регулятор, содержащий первый датчик фазовой координаты, последовательно соединенные устройство определения знака, дифференцирующее устройство и устройство запоминания экстремума, компараторы, выходами
подключенные к соответствующим входам устройства перемножения знаков, а вход устройства определения знака через устройство определения модуля соединен со вторым входом устройства запоминания экстремума 2.
Однако погрешность в таких системах вызвана отсутствием при построении алгоритма информации об ускорении изменения измеряемой координаты и ее последующих производных в точках фиксируемого экстремума.
Цель изобретения - повышение точности регулятора, путем повьвиения точности в определен) моментов переключения оптимального релейного управления.
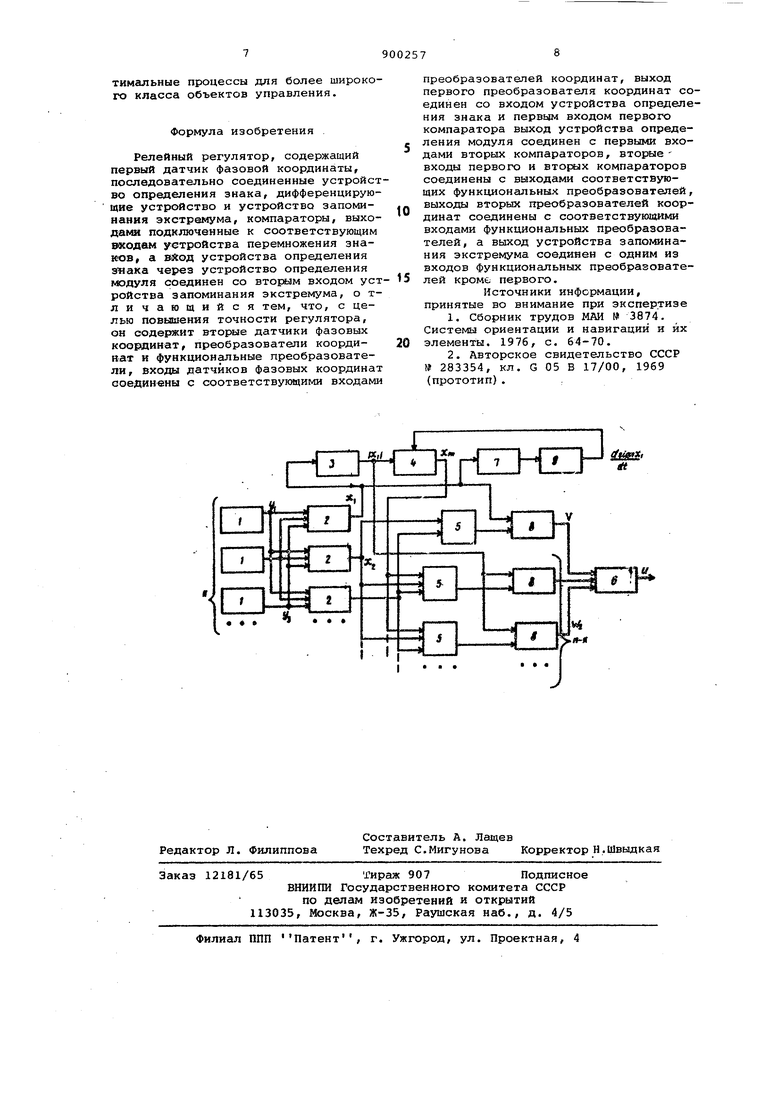
Поставленная цель достигается тем, что в регулятор дополнительно вводят вторые датчики фазовых координат, преобразователи координат и функциональные преобразователи, выходцы датчиков фазовых координат соединены с соответствукяцими входами преобразователей координат, выход первого преобразовате-пя координат соединен со входом устройства определения знака и первыь входом пе(вого KOhmaратора, выход устройства определения модуля соединен с первьтг.ш вxoдa tи вторых компараторов, вторые входы первого и вторых компараторов соеди нены с выходами соответствующих функционгальных преобразователей, выходы вторых преобразователей координат соединены с соответствующими входами функциональных преобра зователей, а выход устройства запом нания экстремума соединен с одним и входов функциональных преобразовате лей кроме перв.ого. На чертеже изображена блок-схема регулятора, Регулятор включает в себя К датчиков фазовых координат 1, К преобразователей координат 2, устройство определения модуля 3, устройство запоминания экстреь{ума 4 , функциональные преобразователи 5, устройство перемножения знаков релейных сигналов 6, устройство определения знака 7, компараторы 8 и дифференцирующее устройство 9. Выходы всех датчиков 1 соединены с соответствующими входами всех преобразователей 2, выход первого из которых соединен со входом устройства определения модуля 3, устройством определения знака 7 и первым входом первого компаратора 8, выходы последующих преобразователей 2 соединены с соответствующими входами всех функциональных преобразователей 5, выход первого функционального преобразователя 5 соединен со вторым входом первого компаратора 8. Выход устройства определения модуля 3 подключен ко входу устройства запог-шнания экстремума 4, выход которого подключен к первому входу всех преобразователей 5 кроме первого, выходы которых подключены ко вторым входам соответствующих второго и последующих компараторов 8, а первые входы компараторов 8 кроме первого подключены к выходу устройства 3. Выходы всех компараторов 8 подключены ко входам устройства перемножения знаков релейных сигналов 6, а выход устройства определения знака 7 через дифференцирующее устройство 9 подключен ко входу обнуления устройства 4 . Каждый из преобразователей 2 ализует операцию { Е 4j где х- - выходной сигнал i-ro преобразователя 2; у. - выходной сигнал j-ro датчика 1. Устройство запоминания максимума 4 совместно с устройством определени модуля- 3, устройством определения знака 7 и дифференцирующим устройством 9 формируют сигнал Х|„ на выходе устройства 4, определяемые выражениямипри sign X, sign х, at при sign х - sign х. d sign X dt Обнуление запомненного сигнала х ализуется при : ройствами 7 и 9. Сигнал V на выходе первого компаратора 8 определяется зависимостью V - sign 5 , где ,+f (Xj,x,... x) , а функция fj, (Xj ,Xj, .. . , реализуется в первом функциональном преобразователе 5. Сигнал W на выходе второго и последующих компараторов 8 определяется зависимостью W| - sign 3 , i 1,2,..., и-к, где 3ei-/Xi/ + fi {х,х,х, . . . , , а функция fi (, jX , . . . ,Хц) реализуется Е функциональных преобразователях 5, кроме первого. Устройство умножения знаков релейных сигналов 6 реализует операцию где и - выходной сигнал устройства б, определяющий знак управляющего воздействия системы управления , Известный регулятор при наличии и датчиков реализует (и-1) мерную гиперповерхность оптимального переключения в имерном измерительном базисе При наличии К датчиков (К-и) в К мерном измерительном базисе нельзя реализовать полную гиперповерхность оптимального переключения для определения .асах (и-1) переключений, так как в рассматриваемом случае размерность гиперповерхности равна или меньше размерности измерительного базиса. Гиперповерхность оптимального переключения строится методом попятного движения путем последовательного увеличения размерности от одномерного многообразия - фазовая траектория последнего интервала управления до (и-г1) мерного многообра3I-M точек - совокупность фазовых траекторий второго интервала. В предлагаемом регуляторе (К-1) мерное многообразие точек поверхности оптимального переключения реализуется в К мерном измерительном базисе для определения (п-К+1)-го и последующих переключений вплоть до отключения управления. Для этого семейство траекторий (и-к+2) интервала управления проектируют на К мерное измеряемое подпространство и определяют положение проекции изображающей точки в измеряемом подпространстве относительно полученной проекции по зависимости ff 0, где 5 (Xj, Xj,...,Xi(,) уравнения проекций семейства фазовых траекторий (л-К+2) интервала управления на измеряемое подпространство. Так, например. при К 2 измеряемые сигналы х, и х дают на плоскости в ортах х, и х в измеряемом подпространстве точку, соответствующую проекции изображающей точки в пространстве состояний на плоскость х, Xj,, а уравнения + fо(Х; соответствуют проекции на плоскость х х j фазовой траектории последнего интервала управления проходящей через конечную точку при ведения. Последнее переключение про изойдет в момент, когда проекция изображающей точки в измеряемом подпространстве, движение которой определяется траекторией предпослед него интервала, совпадает с проекцией фазовой траектории последнего интервала. В пространстве состояний (и-К)-е переключение определяется К мерным множеством точек переключения. В этом К Мерном множестве выделяют се мейство (К-1) мерных множеств по многообразию параметра Хк„с„. Например, объем разбивают на семейство поверхностей, каждая из которых соответствует определенному значению X „. Выделенное (К-1) мерТзое множество в данном случае является про екцией на измеряемое подпространств состояний точек (vi-K)-ro переключения при точечном отображении област фиксируемого- экстремума по гиперповерхности оптимального переключения и может быть реализована зависимостью Х(л-к 0. Область фиксируемого экстремума X кпаж определяется как пространство (м-2)-го порядка по признаку х х, 0. Точечное отображение этого пространства на семейство фазовых траекторий второго интервала, т.е. на полную гиперповерхнссть оптималь ного переключения,будет так же (и-2 мерное многообразие. Чтобы размерность выделенных областей точек первого и последующих переключений была не более (-K-l) и она могла бы быть реализована зависимостью в К мерном базисе не обходимо сократить .размерность обла ти фиксируемого экстремума. Для это го в области фиксируемого экстремум значения высших производных принимаются равными нулю, т.е. .и-1 () О,.. . ,х О, X Например, на измеряемом подпрост ранстве второго порядка - плоскости (К-2) можно выделить одномерные однообразия - линии переключения. При т 3 область фиксируемого экстрему ма одномерна, так как отличается значением второй производной для зн чений х, ; Х;, 0. Область фиксируемого экстремума (линию по фазовы траекториям) отображают на поверхность оптимального переключения, где она даст кривую и проектируют вновь полученную кривую на плоскость х,х-,. Проекция этой кривой может быть выражена зависимостью / к,/ + f(х ,х ), а момент переключения определяться по зависимости О. При и 4 область фиксируемого экстремума двумерна и является плоскостью с ординатами Ц , х , т.е. в точке экстремума могут быть произвольными величины второй и третьей производной. Выбрав х О, сократим размерность области фиксируемого экстремума до одномерного. Семейство оптимальных процессов, для которых начальныгии условиями является линия с вариацией значений х , даст в пространстве состояний кривую точек первого переключения, кривую точек второго переключения и кривую точек третьего переключения, совпадающую с фазовой траекторией, которые проектируются на измеряемое подпространство второго порядка при К 2 и выражаются + f (x,Xj); /х,/ + fj, (х, Xj); х -f fo (х j) . Кривые первого и второго переключения зависят от положения линии начальных условий или от величины х,. Для реализации регулятора заранее просчитываются оптимальные процессы при разных значениях х,. Результаты просчета в виде функ1;ий закладываются в функциональные преобразователи 5 и 6 регулятора. В регуляторе знак релейного управляюгцего воздействия на первом интервале управления определяется сигналом V. Первое и последующие переключения произойдут при сменах знаков сигналов W; последовательно от первого до (1-К)-го переключения. Знак сигнала W меняется один раз в процессе перевода фазового состояния в конечную точку приведения. Последующие за (и -К) -м переключения происходят при смене знака сигнала V, который изменяется (К-1) раз. При достижении сигналом нулевого значения регулятор за счет связи через устройства 9 и 7 приводится в исходное состояние. Коэффициенты преобразователей переменных состояния 2 выбираются так, чтобы обеспечить окончание процесса при Х;,. 0. Предлагаемый регулятор, без применения наблюдателей для восстановления полной информации о состоянии объекта, позволяет реализовать оптимальные и квазиоптимальные процессы. Когда и -К 1 и в процессе управления в точке экстремума выполняется х 0, то реализуются оптимальные процессы, прии-К 1 реализуются процессы близкие к оптимальным, так как не учитываются значения высших производных. По отношению к известному регулятору предлагаемый регулятор реализует оптимальные И квазиоптимальные процессы для более широко го класса объектов управления. Формула изобретения Релейный регулятор, содержащий первый датчик фазовой координаты, последовательно соединенные устройст во определения знака, дифференцирующие устройство и устройство запоминания экстремума, компараторы, выходами подключенные к соответствующим входам устройства перемножения знаков, а Ход устройства определения эРнака через устройство определения модуля соединен со вторым входом уст ройства запоминания экстремума, о тличающийся тем, что, с целью повышения точности регулятора, он содержит вторые датчики фазовых координат, преобразователи координат и функциональные преобразователи, входы датчиков фазовых координат соединены с соответствующими входами преобразователей координат, выход первого преобразователя координат соединен со входом устройства определения знака и первьом входом первого компаратора выход устройства определения модуля соединен с первыми входами вторых компараторов, вторые входы первого и вторых компараторов соединены с выходами соответствующих функциональных преобразователей, выходы вторьлх преобразователей координат соединены с соответствующими входами функциональных преобразователей, а выход устройства запоминания экстремума соединен с одним из входов функциональных преобразователей кроме первого. Источники информации, принятые во внимание при экспертизе 1.Сборник трудов НАИ № 3874. Системы ориентации и навигации и их элементы. 1976, с. 64-70. 2.Авторское свидетельство СССР 283354, кл. G 05 В 17/00, 1969 (прототип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1980 |
|
SU900258A1 |
| Релейный регулятор | 1981 |
|
SU1029139A1 |
| Релейный регулятор | 1980 |
|
SU885971A1 |
| Релейный регулятор | 1978 |
|
SU765782A1 |
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Экстремальный регулятор | 1981 |
|
SU974340A1 |
| Электропривод постоянного тока | 1987 |
|
SU1458960A2 |
| Устройство для защиты бурильной колонны от обрывов и скручиваний | 1985 |
|
SU1263823A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО С КУСОЧНО-ПОСТОЯННЫМ | 1970 |
|
SU283354A1 |
