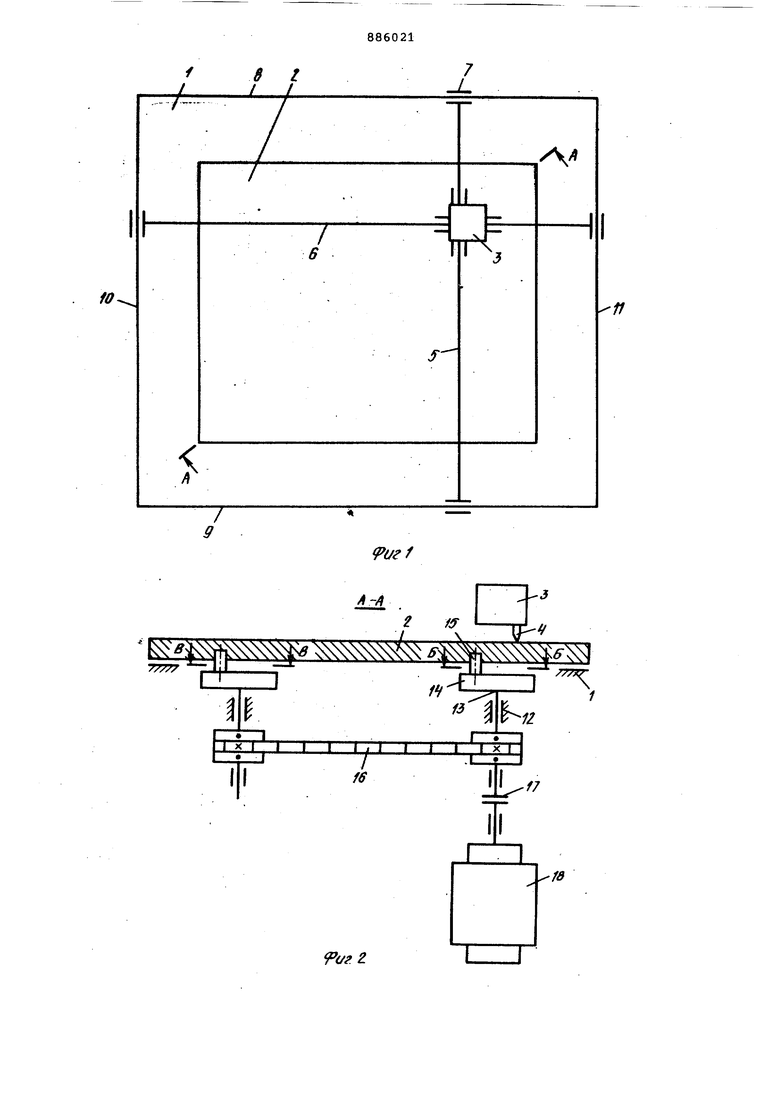
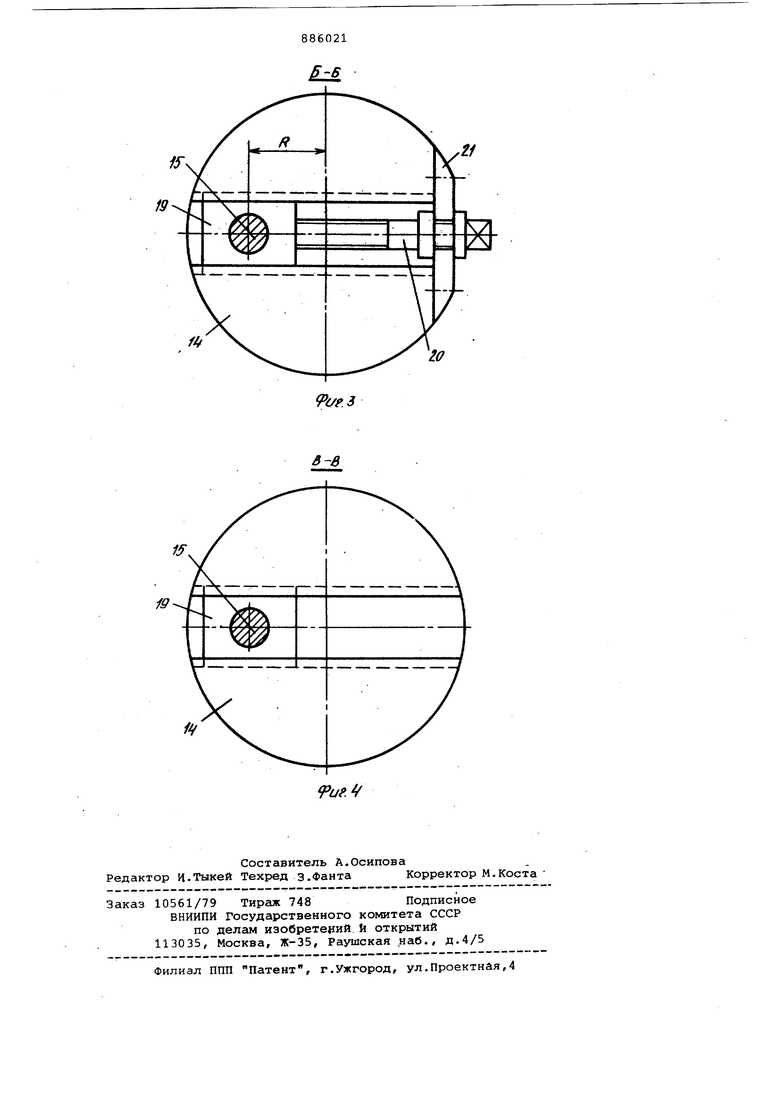
ке контура детали, -о достаточности перекрытий смежных проходов фрезой при прострочной обработке -плоскостей и выборке карманов: о достаточности отводов инструмента от детали и прис пособления (или его отдельных частей для безопасного обхода препятствий прм выполнении холостых ходов и т.д Вместе с тем отсутствие прямого (графического) ответа, на перечисленные вопросы делает полученное графи ческое изображение недостаточно наглядным и тем самым .затрудняет его последующий визуальный и размерный анализ, Цель изобретения - расширение об ласти применения двухкоординатного графопостроителя за счет повышения наглядности представления вычерчивае мых траекторий фрезы. Указанная цель достигается тем, что в известный графопостроитель, содержащий основание, планшет с выполненными в нем углублениями, регистрирующий узел с пищущим элементом, связанный штангами с каретками установленными с возможностью перем щения на двух горизонтальных и двух вертикальных направляющих, жестко закрепленных на основании, введены регулирующий элемент и узел перемещения планшета, содержащий цапфы, установленные в основании, двигател однооборотную муфту и механизм сумм рования движений центра и образующей фрезы, выполненный в виде двух кривошипов с пальцами, установленны ми в углублениях планшета, и осями установленными в цапфах основания, соединенных зубчатым ремнем, а одно оборотная, муфта установлена на оси одного из кривошипов и связана с двигателем, при этом на обоих кривошипах пальцы запрессованы в пo Iзyшке, установленной, с возможностью радиального.перемещения в пазу Т-об разной формы, выполненном в кривоши пе, причем одна из ползушек связана с регулирующим элементом, выполненным в виде микрометрического вин та, установленного в кривошипе. На фиг.1 показана припципиальная схема графопостроителя,.на фиг.2 разрез А-А на фиг.1, на фиг. 3 - разрез Б-Б на фиг.2, на фиг. разрез В-В на фиг.2. . Графопостроитель состоит из основания 1 с планшетом 2 и регистрирующего узла 3. с пищущим элементом 4. Регистрирующий узел 3 посредством вертикальных 5 и горизонтальных 6 штанг с каретками 7 - по концам помещен на двух .вертикальных 8 и 9 и двух горизонтальных 10 и 11 направля щих, жестко закрепленных на основании 1. В основании 1- установлены цап фы 12. В цапфах.12 помещены оси 13 двух кривошипов14, пальцы 15 которы установлены в углублениях планшета 2. Оси 13 кривошипов 14 соединены между собой .посредством зубчатого ремня 16. На оси 13 одного из кривошипов установлена однооборотная муфта 17, которая связана с многоскоростным электродвигателем 18. В теле кривошипа 14. выполнен паз Т-образной формы, служащий направляющей для ползушки 19,несущей запрессованный палец 15.У ведомого кривошипа ползушка 19 плавающая, а у ведущего кривошипа ползушка взаимосвязана с регулирукицим элементом радиуса R, выполненным в виде микрометрического винта 20, установленного в теле кривошипа 14 и зафиксированного в осевом направлении посредством планки 21. Устройство-снабжено системой ручного и автоматического включения двигателя 18 ( не показано. При этом система автоматического включения основывается на использовании любых технологических.команд проверяемой программы в качестве исполнительных команд на включение и выключение электродвигателя 18. Подготовка описываемого устройства к работе включает в себя переключение двигателя 18 на выбранную ступень скорости вращения,, например, наиболее близкую к скорости вращения шпинделя станка по контролируемой программе, и установку пальца 15 ведущего кривошипа на величину радиуса R-B соответствии с масштабом вычерчивания и радиусом фрезы,контролируемой программы. Указанная регулировка осуществляется путем вращения микрометрического винта 20, обеспечивающего радиальное перемещение ползушки 19 в Т-образном пазу тела кривошипа 14. Устройство работает следующим образом. При воспроизведении контролируемой програмлфл пишущий элемент 4 при перемещении регистрирующего узла 3 вычерчивает на планшете 2 траекторию движения рабочего органа станка по программе в виде функции (x), т.е. в виде совокупности, отрезков прямых линий,. и обычно. При вычерчивании заранее выбранных участков включают Гв ручйую или автоматически, в зависимости от применяемой системы управления включения) двигатель 18, который через однооборотную муфту 17 приводит во вращение ось 13 ведущего кривошипа 14. .Одновременно получает вращение и ведомый .кривошип 14, кинематически связанный с ведущим кривошипом посредством зубчатого ремня 16. В результате .вращения кривошипов 14 установленный.на их пальцах 15 планшет 2 начинает- совершать равномернопоступательное движение по круговой траектории радиуса R, имитируя тем самым траекторию движения образующей фрезы. А так как движение планшета 2 происходит независимо от движения регистрирующего узла 3 в процессе воспроизведения контролируемой программы, то пищуший элемент 4 буде вычерчивать на планшете 2- результирующую траекторию, являющуюся суммой траектории движения центра фрезы по программе и траектории движения обра зующей фрезы .относительно ее центра при заданной частоте вращения. Тем самым на планшете вычерчивается спиральная линия, наглядно показывающая зону обработки, перекрываемую-концевой (или торцовой ) Лрезой. В результате этого наглядность полученного . графического изображения повышается и последующий визуальный и размерный анализ этогоизображения максимально упрощается, поскольку края спирали показывают истинный размер обрабатываемого контура летали (при контурном Лрезеровании), а при.торцовом )резеровании величина наложения краев смежных спиралей друг на друга по казывает истинную величину и достаточность перекрытия-Лрезой соседних зон при многопроходной обработке карманов, выборок т.п. элементов. При включении двигателя 18, за счет однооборотной мусЬты 17, останов план шета 2 происходит всегда,в одном и том же положении,что гарантирует от сутствие искаженной при вьтчерчивании комбинированных граЛических изображений, включающих в себя, как линейные элементы типа гЬункции у f{x) в обычном изображении, так и элементы, изображенные в виде спиральной лиПрименение предложенного .устройст ва обеспечивает повышенную нагляднос представления вычерчиваемых траекторий , что в свою очередь облегчает и упрощает их последующий визуальный и размерный анализ и в конечном итоге значительно облегчает контроль управ ляющих программ для металлорежущих станков с ЧПУ типа вертикально-Лрезерных, обеспечивая тем самым повышение производительности труда технологов-программистов при вьтолнении этой работы на 10-15%, практичес ки полностью исключая- при этом возможность пропуска ошибочных-решений, влекущих за собой зарезание инструментом .необрабатываемых элементов вы тупающего- контура детали, врезание Лрезы в деталь-, приспособление, прижимы и т.п. Предложенное устройство характеризуется,компактностью и простотой конструкции, малыми габаритами и удобством в работе. Формула изобретения Двухкоординатный графопостроитель для вычерчивания -траектории движения Лрезы металлорежущих станков .с чксловыг- программным-управлением, содержащий основание, планшет с вьтолнен-:ньв и в нем .углублениями, регистрирующий узел с пишущим .элементом, связанный штангами с каретками,, установленньми с возможностью, перемещения на двух горизонтальных и двух вертикальных направляющих, жестко закрепленных на основании,.отличающийся тем, что, с целью .расширения.области применения графопостроителя за счет повышения наглядности .представления вычерчиваемых траекторий Т)резы, в него введены регулирующий элемент и узел перемещения планшета, содержащий цапфы, установленные в основании двигатель, однооборртную муЛту ,и механизм суммирования движений центра и образующей фрезы, выполненный в виде двух кривошипов с пальцами, установленными в углублениях планшет.а,. и осями, установленными в цапфах основания, соединенных зубчатым ремнем, а однооборотная муфта установлена на оси одного из кривошипов и связана с двигателем, при .этом на обоих кривошипах пальидл запрессованы в пол-, зушке, установленной с возможностью радиального перемещения в пазу Т-образной формы, выполненном в кривошипе, причем одна из ползушек связана с регулирующим элементом, выполненнъгл в виде микрометрического винта, установленного в кривошипе. Источники информации, принятые во внимание при экспертизе 1.Басманов В.В, Приборы для математической обработки и построения кривых. М. , Машиностроение. ,1973, с. 22-32. 2.Справочник Станки с программным управлением, М., Машиностроение, 1975, с. 191-193 (прототип;.
8 / / /
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный графопостроитель для вычерчивания траектории движения фрезы металлорежущих станков с числовым программным управлением | 1978 |
|
SU788131A1 |
| Устройство для вычерчивания гармонических кривых | 1980 |
|
SU878605A1 |
| Устройство для программного управления графопостроителем | 1986 |
|
SU1399702A1 |
| Графопостроитель | 1988 |
|
SU1597556A1 |
| Графопостроитель | 1987 |
|
SU1475835A1 |
| Приспособление к фрезерному станку для изготовления вращающихся инструментов типа фрез и т.п., имеющих режущие кромки левого и правого хода | 1927 |
|
SU31851A1 |
| Гвоздильный станок двойного действия | 1929 |
|
SU23325A1 |
| Аппарат для автоматического выполнения совместной горизонтальной и вертикальной топографической съемки | 1932 |
|
SU37857A1 |
| Графопостроитель | 1978 |
|
SU752406A1 |
| УСТРОЙСТВО для ДОЗИРОВАНИЯ ПОРОШКОВЫХ МАТЕРИАЛОВ | 1970 |
|
SU259688A1 |
6
fO
5
/v/w
« / I I X I
II
a Z
A
V
n
fpt/ef
-t.
If
Jл
1
Т /tf
f7
in
Л Г
