(54) СТРЯХИВАТЕЛЬ ПЛОДОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Стряхиватель плодов | 1978 |
|
SU731922A2 |
| Устройство для встряхивания плодовых деревьев | 1982 |
|
SU1055400A1 |
| Инерционный стряхиватель | 1984 |
|
SU1346070A2 |
| СТРЯХИВАТЕЛЬ ПЛОДОВ | 1972 |
|
SU359007A1 |
| Устройство для стряхивания плодов | 1980 |
|
SU873954A2 |
| Турельный стряхиватель плодов с деревьев | 1981 |
|
SU959676A2 |
| Стряхиватель плодов | 1976 |
|
SU620238A1 |
| Стряхиватель плодоуборочной машины | 1978 |
|
SU743630A1 |
| Машина для уборки плодов | 1975 |
|
SU581905A1 |
| Устройство для стряхивания плодов | 1977 |
|
SU674719A1 |

Изобретение относится к устройствам для поточного сбора плодов методо.м встряхивания плодовых деревьев прп ненрерывио.м .ин агрегата по междурядью сада.5
Известны етряхнвате;п1 для поточного сбора плодов, вкл1Очаюпи1е ра.му, на горизонтальном подпруж11не 1ном телсскопичеcKo.vt брусе которой смонтирован захват, внутри которого расположен вибратор 1, 2. Ю При это.м захват свободно посажен на вертикальную ось внбратора, выполнен поворотным вокруг нее и снабжен одним или несколькими V-образными пазами, смещенными относительно осп новорота и в которых установлены свободно проворачивающиеся вокруг своих осей ролики, и .м фиксатором, а вибратор вынолнен в виде двух симметричных кривои1пнно-шатунных механизмов, имею1пих обпию ве.ту- 20 щую ось и совместное вращение с захватом п связанных щат намн с дебалансамп.
Кроме того, указанные стряхиватели снабжены приводом вибратора, питаемым от тракторной НЛП обособленной гндросис- 25 темы.
К недостаткам таких стряхпвателей следует отнести следующее:
нри незначительном сонрикосновенип HJTaM6a дерева с захватом начинается по- 30
ворачпванне последнего, что прлводпт к неполному встряхиванию;
возможны случаи неэффективного встряхивания нлодового дерева, когда, например, щтамб дерева соирикоснется с захватом в точке, расно.юженпой вын1е осевой линии наза захвата (см. фиг. 1). В этом случае захват начнет проворачиваться (т. к. ему легче проверпуться, }1ежелп удлиниться телескопическому брусу рамы), и поскольку щтамб дерева не будет зажат, то эффектнвного встряхнванпя не произойдет;
поскольку вибрация штамба дерева происходит в течение всего процесса взаимодействия захвата со щтабом, т. е. и тогда, когда он еще не зажат, то, естественно, должны наб.1юдаться значительные повреждения последнего.
Первый недостаток устранеп в стряхивателе плодов 2 за счет выполнения захвата внбратора п плоскости его поворота подпружиненны.м и снабжения его упором. Целью изобретения является повыщение эффективности стряхивания и уменьщения повреждения стволов деревьев.
Указанная цель достигается тем, что гпдронрнвод снабжен гпдроцилпндром выдвпже)щя телескоппческой балки, а система управления нмеет контактные выключателн, датчик поворота захвата для )чсния гидропривода и элсктроупр.илясм1)с.ОЛОТНИКИ, причем ролики ВЬПОЛПСНЬ ПОД ружппеппь ми относительно захвата для взаимодействия с кoптaктI l ; nijibMK)4aгелями, которые подключеп1 1 к элечтроуправлепию золотников, один из которых соединен с гпдроцилипдром выди11жен Я телеекопическоп балки, а другой - с гпдромотором.
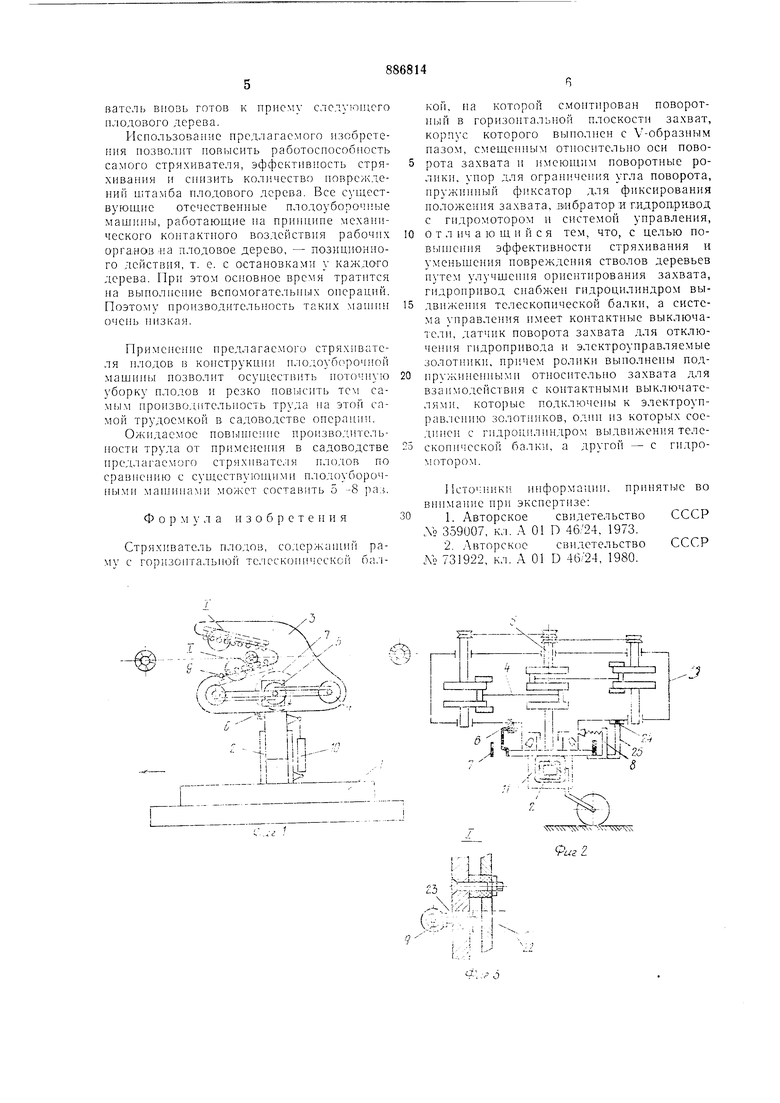
Ыа фиг. 1 изображен стрях ватель rr;ioдов, вид сверху; на фиг . 2 -- сбоку, пазрез; H;I фиг. 3 - Biiipi)iB I на cbi:i. 1; на фиг. 4 - гидравлическая схема стряхивателя: на фиг. 5 - электрическая схема упр а вл е и и я стр я х и в а тел ем.
Стряхива1е;1ь н,1ОД()Б сосччягг из j)aMi)i i, ча горизонтальной телеск(Л1ическо| ба.тке 2 KOTopoiO смонтирован 3 с V-образным назом, вибратора 4, расио.юженного нутри захвата и вьнюлнеииого ;; ;;, кр1ню1нинно-и атун.чых .механизмов, имеюцих общую ведун1у1о ось и сняза 1НЬ х uiaг ч1ами с деба.тансами. Зах1К1Т 3 с IICKOTOрым смси1,сн11см 3aiq)CH.eii iia оси 5 В1 брагора и имеет возмо:кност1 нслюрста вокруг нее, при эт(П1 в нлоско ти своего возMOMsHoro HOBOpoia он с o.uioii стороны ограничен унором (i, а с д)ч (;и : одир -жнчен iipy/KiiHoii 7. Кроме ToiY), .saxbai 3 j; исходном HOJlO/KCiinii CTOHOplliCH Нр лИ П1ЬМ
фнксатором 8. (, нельго у кчпя:;1:1 1;м iioii|)ежл.ения .черева, is назе зах15ата уст.мюилены ролики 9, свободно н)оно1); 1нв: ;1лци-еся вокруг своих осей, а с целью телескопического ,виження балки 2 он сн;1б:.;че1 г,н.ч,;1опи.1ичдром 10. .И1Ю.д В1 братора 4 осуи1ест«ляется от гидромотора 11, зк.тюченпого в пгтросхему стряхивателя; состояП1ую из ма.слобака 12, насоса 13, предохранительного клаиаиа 14 н 1:агнет;г х 1ьно;1 магистрал 5. Вместо гпдросхем )яхпзате.тя может быть псно.и зован;; тр.кторная гидросистема, где есть уже сзоч MIIC/IOбак. насос, и)едохра1Н1тельиь Г1 клапан.
Ги;фопн.1нндр 10 н гидромотор 11 но,,.оед,иня1О|ея к иагнетате.пдкч м;ц-мстра.;1И 15 гндросхемы етряхнватсля е HOMOHU IO твух 141дроэ,лектрозо;1отн11ков К н 17. Элeктp o aгннтьi 18, 19 н 20 золотников И) ч 17 электрической цепочкой подсос.и:непы X схеме управления, сост(«ипей из лонтактнг 1х грунн 21 п 22, смонтированиь.х в роликах 9 е двух сторон паза захвата п Юдпру/ и11еп1Н 1х пружпнамп 23, ii o.uioro контактного датчика, состояп1его пз контактов 24 п 25, ycTanoB.ieiHHirx еоотр,стственно па корпусе захвата 3 и бадке 2 рамы, контактора 26 п его нор.мально закрытого контакта 27. Электропитапие схемг, справлеппя осуществляется от источппка гока 28. Для электрической пастройки золотников 16 и 17 в электрическую цепь их электромагнитов 18 н 20 введены переменные сопротивления 29.
Сгряхппаге,:ь Ki6oiaer ,}М.
llpti дви ;-:е;н1и С1рях11 5;гге. i:,:(;.;o;i п -(;Прази)П иаз захвата 3 захо.тиг п/юдового ;;ерева. ()г crjnpnKocnfjniMinH и :с.1ел,пего с роликами 9 TOII 1;лп nnoii стороП:. зпмькается копт:л ;1 :;ая Ipvnna 21 n;ii 22, иодключая .:,: к мс1(;чпику юка 23 эл(ктрс)магчит 18 и.ли 19. которые, смен1,ая нычж зол() lii г, и.:и CTOpoiiX, подсоединяют i :i.i;)on;. ПЧ чр И) к 11агпетате;п,;ОЙ ма;ист:)а. 15 ги/кюсхе п, стряхпвателя. Гидроцили |др 0, ;гяriiiian в 5ггягпвая ево1 иггок. гп liiacTраивает телесконическую балку 2 )aMi:i 1, ч 1обы 1птамб п. 1()л,ово1о дсрсчп пах.:;. .Я по uceufji V-o6pa3ii(jro ,a захвата 3. Вс; едствпе па.чичпя ностхчыче.пдюй ско irjCiH агрегата 1птамб де)ева i,iOT:i i входпч в V-(6pa3iib i паз захва1а 3, при этом замыкаются хоптакшыс i4 iinbi21 и22. капни эгих групп пггок зо.ютппка 16 среднее пснтральп }е по.ю/кенпе, тем 1Т1дроп, 10;
э.кчсчрохкпчпгг 20, подключаяс к псточппку ;()ка 28. neptNicniacT пг;ок зо.:1 ixinxa 17 в Kpaiince а(лИ)/ксП:1; .. ;:-.ч iXM сам, :чч;р( 11 к па ;к такм..|ой ма1ЧК: pa.i ii lo, т. с-. oi crc;ii5a5: : ;: - нпбра гора1. .;брапи oi )го;л)1Ч) iin:; i6 передастся :под;)В( дерег у. I 1:)И ; а.. niJiCM Д31:/ке 1;| ;i а1Ч)с:ата cjianai (.Т 11р /К;1ччы 1 (Ьпкеатор Н, п захзат 3, с/кчмая np iiiiy 7, П{)во15ачп1и1ется otni
5 вибратора. При .Ч1Пом :.:е vro чо1;:.)роча замь каются ме/кд co6o;i ;v(j iiaA:ы 24 и 25, подключая чем Кчггакiop 26 к ;1С;т)чппку тока 28. Ilpn сг:аб;;ч:;;;aniiii ;)птак;ч)ра 2() разхи кас-т сн (чх) и:,}ма. ьпо-за 1 rbiii контакт 27, ;лсст:)чизая ГСМ ii.ieKIpoMагнпт, , i9 i; 20 -: Л(ПЧП|К{;В 16 п 17. Прп этом HiiXih 3 :.1мч;: 1 (j по-пре/1 пему б де| занпма Ч) с )е.чпе пей гра,:1ьп(;е пол(;/ :еппе, за;п1р;:Я г11Д1)опи, 10. а И1ТОК золотника 17 иеремеjnacTCSi в п)авое Kpaiiiice no,4(.i i-;enne, отк.почая тем еамям гидромот(;р 11 (.; iiar-e ате,1Ь;1(}й магистра,1и 15, т. е. )аптая тем caMi.iM работу вибратора, а значит ;: вибрапчпо п;1одового дерева.
Прп да. двнженп аг|егата Н1тамб дерева начннает выходнть из захвата 3. ilpn полном В1)1ходе П1тамба дерева ii.3
захвата 3 размыкаютея коптак1ч;ч;( гр ч;пы 21 п 22, а сам захват пружиной 7 поьо)ачпвастся в обратном направлении до упора 6 п 1)пксируетея в этом исрвонача,.-ном исхо.тном по,1ожеппп фиксатором 8. В
процессе этого поворота размыкаются собой коитакты 24 и 25, обесточпва:отся коитактор 26 и замыкается его иормальноза.мкпутый коптакт 27, подключая тем самым электрическую схему управления к,
источнику тока 28. Таким образом, стряхиватсль вновь готов к npucNsy слслующсго плодового лерева,
Использоваинс предлагаемого изобретения позволит повысить работоепособиость самого стряхивателя, эффективность стряхивания и снизить количество поврс/кдеиий штамба плодового дерева. Все существующие отечественные плодоуборочные мащины, работающие на принпипе механического контактного воздействия рабочих органов Иа плодовое дерево, - позиционного действия, т. е. с остановками у каждо-го дерева. При это.м основное время тратится на выполпение вспомогательных оисраций. Поэтому производительность таких маи1пн очень низкая.
Примеиение предлагаемого стряхивателя плодов в конструкции 1т.1одоуб(1рочноГ1 машины позволит осун1сствить поточную уборку илодов и резко повысить тем саМ1)1М производительпость труда па этой самой трудоемкой в садоводстве операции.
Ожидаемое повынгение пропзводительноети труда от применения в садоводстве иредлагаемого стряхивателя и.юдов по сравпению с сущсствуюнхими п.тодоуборочнымп маплшами может составить 5 -8 раз.
Фор м у л а и 3 о б р е т е н и я
Стряхиватель плодов, со.чержащий раму с горизо1ггальиой телескопической 6;,iкои. иа которой смонтирован поворотный в горизонтальной плоскости захват, корп с которого выполнен с V-образным назом, смещенным относительно оси поворота захвата и имеющим поворотные ролики, упор для ограпичения угла поворота, пружиппый фиксатор для фиксирования положения захвата, .вибратор :и гидропривод с гидромотором н системой управления,
10 о т л ич а ю щ и и с я тем, что, с целью повьнисиия эффективности стряхивания и уменьщения повреждения стволов деревьев путем улучшеппя ориентирования захвата, гидропрпвод спабжен гидроцилиндром вы5 движе}П1я телескопической балки, а система управления имеет контактные выключа1ели, датчик поворота захвата для отключенпя гидропривода и электроуправляемые золотники, причем ролики выполнены под0 иружиненпымп относительно захвата для вза1 модействия с контактными выключателями, которые цодключеиы к электроуправ.чеппю золотников, одии из которых соединен с гидрошлиндром выдвижения теле5 скопичсской балки, а другой - с гидроМ(УГОрОМ.
Источник информации, цринятые во вннмание при экспертизе:
Л 359007, кл. А 01 D 46/24, 1973.
,L. ..
&-г-д
2i
n;:;cRSi
Т
Л
