I
Изобретение относится к тракторному машиностроению, а более; конкретно - к автоматизации полигонных испытаний самоходных агрегатов.
Известна система управления трак, тором р j, содержащая пульт дистанционного управления и исполнительного устройства. Эта система не позволяет осуществлять автоматическое управление агрегатом по определенной программе.
Ближайшей по технической сущности к изобретению является система управления самоходным агрегатом 2 J, содержащая ограничительный кабель, несущий электромагнитное поле, магнитоприемник, входной усилитель, амплитудный дискриминатор, программное устройство, соленоиды управления механизмами поворотов и остановки агрегата.
Недостатком этой системы является невозможность программного управления агрегатом на всем участке, oi- раниченном токонесущим кабелем,
Cyщнoctь данного недостатка поясняется следующим образом.
Программное устройство, которое вырабатывает сигнал на поворот ai- регата, включается только при подходе агрегата к кабелю на некоторое расстояние, задаваемое уровнем выходного сигнала амплитудного дискриминатора. , При подходе агрегата к кабелю под острым углом программное устройство из-за отсутствия зависимости фазы поворота агрегата от его угла подхода к кабелю, может повернуть агрегат в сторону кабеля, не от него,
В результате этого за счет радиуса поворота агрегата расстояние между магнитоприемником и кабелем еще более уменьшается.
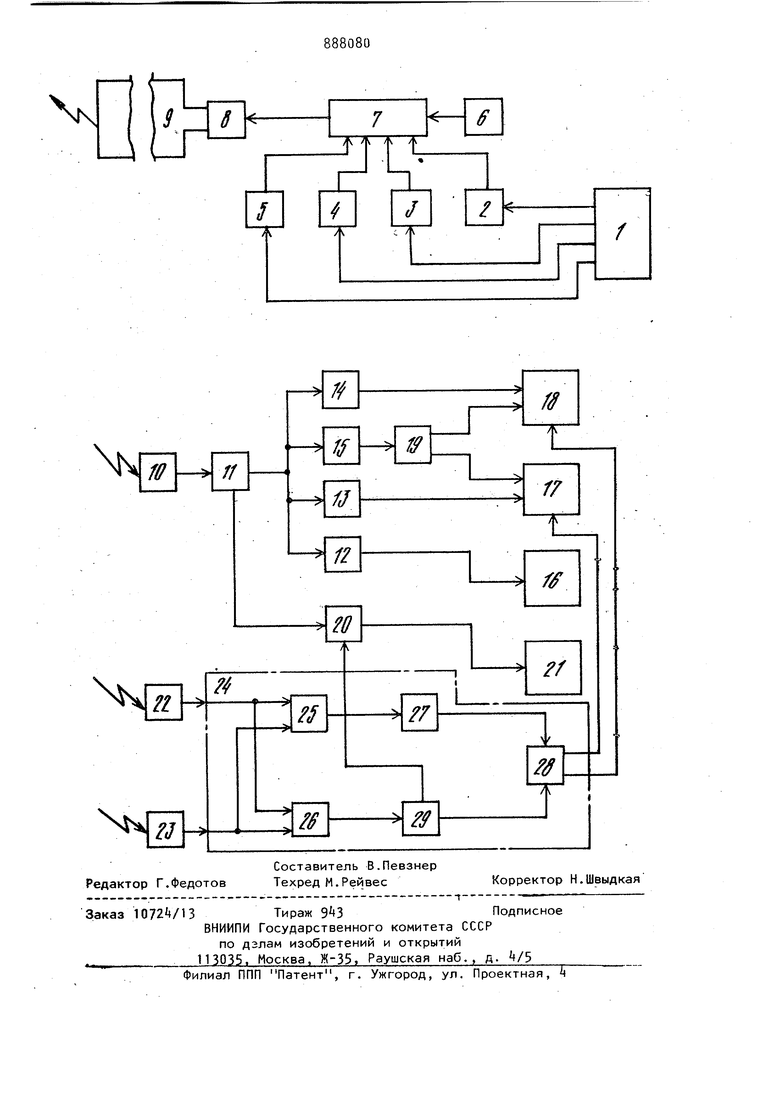
При этом уровень сигнала на выходе амплитудного дискриминатора возрастает и посредством соленоида механизма остановки осуществляется паразитная остановка агрегата. Целью изобретения является расширение функциональных возможностей системы путем обеспечения программного управления агрегатом на всем участке, ограниченном токонесущим кабелем. Поставленная цель достигается тем что в систему, содержащую последовательно соединенные задающий генератор, амплитудный модулятор и усилитель мощности, выходом подключенный к ограничительному токонесущему кабелю, пульт дистанционного управле ния, первый, второй и третий выходы которого подключены к входам соответственно первого, второго и третье го командных генераторов, выходами подключенных соответственно к первом второму и третьему управляющим входа амплитудного модулятора, последовательно соединенные магнитоприемник и усилитель, выход которого через соответственно первый, второй и третий селективные усилители связан с исполнительными механизмами правого и левого поворота и регулятором скорости агрегата, а также программный блок и блок управления двигателем, введены четвертый командный генератор, два дополнительных магнитоприем ника, фазочувствительный блок, блок сравнения и четвертый селективный усилитель, вход которого подключен к выходу усилителя, а выход - к вход программного блока, выходом подключе ного к исполнительным механизмам пра вого и левого поворота, подключенных также к первому и второму выходам фазочувствительного блока, первый и второй входы которого соединены с выходами соответствующих дополнител ных магнитоприемников, а третий выход - с первым входом блока сравнени второй вход которого подключен к вто рому выходу усилителя, а выход - к входу блока управления двигателем, причем четвертый командный генерато входом подключен к четвертому выходу пульта дистанционного управления, а выходом - к четвертому управляющему входу амплитудного модулятора. Дополнительные магнитоприемники выполнены со сферической диаграммой направленности. На чертеже представлена функцио|нальная схема системы. 0 , 4 Система содержи.т пульт дистанционного управления 1, командные генераторы 2-5, задаощий генератор 6, амплитудный модулятор 7, усилитель мощности 8, ограничительный токонесущий кабель 9, магнитоприемник 10, усилитель П, селективные усилители 12 - 15, исполнительный механизм регулятора скорости 16, исполнителк,ные механизмы правого и левого поворота 17 и 18, прогэаммный блок 19, блок сравнения 20, блок управления двигателем 21, дополнительные магнитоприемники 22 и 23 и фазочувствительный блок 24, состоящий из вычитателя 25, сумматора 2б, сигнального усилителя 27J фазового детектора 28 и опорного усилителя 29. Система может работать в двух режимах: дистанционном и автоматическом. В режиме дистанционного управления оператор, находящийся на пункте управления, может вывести агрегат в любую точку полигона и затем перевести его в режим автоматического . управления. Режим дистанционного управления осуществляется следующим образом. По желанию оператора с помощью пульта дистанционного управления 1 осуществляется включение любого из командных генератбров 2 - 4, управляющих скоростью (2) или поворотом (3,4), агрегата. При этом командный генератор программы 5 выключен. Выход ные сигналы генераторов 2-k модулируют по амплитуде несущей частоты задающего генератора 6 при помощи модулятора 7. Амплитудно-модулированный сигнал с выхода модулятора 7 через усили-тель мощности 8 питает ограничительный кабель 9, который создает индукционное поле. Кабель 9 прокладывается по.границе полигона. Его индукционное поле воспринимается магнитоприемником 10, выходной сигнал которого усиливается входным усилителем 11. С целью стабилизации по амплитуде этого сигнала независимо от места нахождения агрегата относительно токонесущего кабеля.9 усилитель 11 выполнен с автоматической регулировкой усиления. Амплитудно-модулированный си гнал с выхода усилителя 11 поступает на
входы селективных усилителей управпения скоростью 12, поворотов праео и лево 13.и I и включения программы 15- Каждый из селективных усилителей 12-15 настроен на частоту сигнала соот ветствующего командного генератора и выделяет этот сигнал.
Выходные сигналы селективных усилителей 12 -14 через соответствующие исполнительные механизмы 16-18 агрегата упарвляют последним по желанию оператора.
Режим автоматического управления характеризуется следующим.
После дистанционного вывода оператором агрегата в одно из ме,ст полигона, ограниченного кабелем 9, оператор с помощью пульта дистанционного управления 1 включает командный генератор программы 5, который производит модуляцию сигнала задающего генератора 6. Сигнал генератора 5 уже известным способом выделяется селективным усилителем 15.и включает программный блок 19- Этот блок, который может быть выполнен в виде ждущего мультивибратора, генерирует поочередно на своих выходах сигналы, которые через исполнительные механизмы 17 и 18 заставляют ,агрегат совершать чередующиеся повороты направо и налево.
Для .того, чтобы агрегат не делал паразитных остановок. или не выезжал за пределы полигона, сигнал ограничительного кабеля 9 при непосредственном подходе к нему агрегата воспринимается двумя дополнительными магнитоприемниками 22 и 23. Эти магнитопри ёмники разнесены в горизонтальной плоскости перпендикулярно продольной оси агрегата и установлены впереди агрегата.
Выходные сигналы магнитоприемнйков 22 и 23 поступают одновременно на вычитатель 25 и сумматор 26 фазочувствительного блока 2. На выходе вычитателя 25 будет присутствовать разностный сигнал магнитоприемников. Этот сигнал(.усиленный усилителем 27, подается на один из входов фазового детектора 28, а с выхода сумматора 2б суммарный сигнал магнитоприемников 22 и 23 через опорный усилитель 29 подается на второй вход фазового детектора 28.
Для того, чтобы поддерживать неизменным уровень выходных сигналов
опорного усилителя 29 независимо от места нахождения агрегата внутри полигона, ограниченного токонесущим кабелем, этот усилитель выполнен с автоматической регулировкой усиления.
На выходе фазового детектора 28 будет присутствовать сигнал, знак которого будет нести информацию о направлении поворота агрегата относително кабеля 9.
Этот сигнал через исполнительные механизмы поворотов 17 и 18 управляет поворотами агрегата.
Следует отметить, что сигналы фазового детектора 28 при подходе агрегата к кабелю 9 на минимально возможное расстояние имеют приоритет над сигналами, программного блока 19.
Таким образом, при соответствующей коммутации выходов фазового детектора 28 с входами исполнительных механизмов 17 и 18, агрегат при его подходе к кабелю 9 на определенное расстояние всегда будет поворачивать в сторону от кабеля 9.
При нахождении агрегата в любом месте полигона, ограниченного токонесущим кабелем 9, на входы блока сравнения 20 поступают равные по величине сигналы с соответствующих выходов входного усилителя 11 и опорного усилителя 29.
Следовательно, на выходе блока сравнения 20 сигнал управления, вызывающий остановку агрегата, будет отсутствовать.
R аварийных ситуациях, связанных, например, с неисправностью механизма поворота и другими подобными причинами, агрегат при выходе из зоны полигона пересекает ограничительный кабель 9. При этом сигнал на выходе магнитоприемника 10, когда последний находится над кабелем, становится равным нулю, так как магнитоприемник имеет диаграмму направленности в вертикальной плоскости типа восьмерки. Это в свою очередь приводит к исчезновению сигнала на одном из входов блока сравнения 20. Ввиду того, что магнитоприемники 22 и 23 выполнены со сферической диаграммой направленности, на другом входе блока сравнения 20 эталонный сигнал опорного усилителя 29 будет присутствовать в любом месте нахождения агрегата на полигоне, в том числе и над кабелем 9.
Следовательно, на выходе блока сравнения 20 при нахождении магнитоприемника 10 над кабелем 9 появится сигнал управления, который .действуя через исполнительный механизм блока управления двигателем 21, останавливает агрегат.
Использование предлагаемого изобретения позволяет расширить рабочую зону полигона, уменьшить число паразитных остановок агрегата, повысить мобильность управления и производительность испытаний агрегатов в режиме крутых поворотов..
Формула изобретения
1. Система управления движением самоходного агрегата при полигонных испытаниях, содержащая последовательно соединенные задающий генератор, амплитудный модулятор и усилитель мощности, выходом подключенный к ограничительному токонесущему кабелю, пульт дистанционного управления первый, второй и третий выходы которого подключены к входам соответственно первого, второго и третьего командных генераторов, выходами подключенных соответственно к первому, второму и третьему управляющим входам амплитудного модулятора, последовательно соединенные магнитоприемник и усилитель, выход которого через соответственно первый, второй и третий селективные усилители связан с исполнительными механизмами правого и левого поворота и регулятора скорости агрегате, а также программный блок и блок управления двигателем, о т л и ч а о щ а я с я
тем, что, с целью расширения функциональных возможностей системы, она содержит четвертый командный генератор, два дополнительных магнитоприемника, фазочувствительный блок, блок сравнения и четвертый селективный усилитель, вход которого подключен к выходу усилителя, а выход к программного блока, выходом подключенного к исполнительным механизмам правого и левого поворота, подключенных также к первому и второму выходам фазочувствительного блока, первый и второй входы которого соединены с выходами соответствующих дополнительных магнитоприемников, а третий выход - с первьГм входом блока сравнения, второй вход ко-торого подключен к второму выходу
усилителя, а выход - к входу блока управления двигателем причем четвертый командный генератор входом подключен к четвертому выходу пульта дистанционного управления, а выходом - к четвертому управляющему входу амплитудного модулятора.
2. Система по п.1, отличающая с я тем, что дополнительные магнитоприемники выполнены со сферической диаграммой направленности.
Источники информации, принятые во внимание при экспертизе
1.Янкевич В.А. и др. Устройство для автоматического дистанционного и радиоуправления трактором ДТ-75. Сб. Проблемы автоматизации сельскохозяйственного производства, М., Колос, ТЭб, с. 190-200.
2.Авторское свидетельство СССР № 173500, кл. А 01 В 69/0, 1965
(прототип).
V
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОХОДНЫМИ АГРЕГАТАМИ ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ В РЕЖИМЕ | 1965 |
|
SU173500A1 |
| Устройство для скважинной индукционной электроразведки | 1979 |
|
SU859982A1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| Устройство для управления судовым агрегатом | 1975 |
|
SU596995A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
| МОДУЛЬ УПРАВЛЕНИЯ ПОЛИГОННЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2670395C1 |
| Устройство ориентации для систем группового автоматического вождения машинно-тракторных агрегатов | 1979 |
|
SU1376963A1 |
| Устройство для управления движением тягового средства прицепного кабелеукладчика | 1985 |
|
SU1308989A1 |