Известны системы автоматического управления самоходными агрегатами при полигонных испытаниях в режиме крутых поворотов, включающие радиопередатчик и установленные на агрегате П-риемник, усилитель и дешифратор сигнала, программное устройство и соленоиды управления механизмами поворотов.
При этом во избежание ухода агрегатов с территории -полигоиа, приходится вести зя ними непрерывное наблюдение.
В предложенной системе этот недостаток устранен тем, что по границе полигона проложен кабель, несущий электромагнитное поле, которое дает при приближении агрегата к кабелю сигнал на его поворот или остановку, а в качестве дешифратора сигнала применен амплитудный дискриминатор.
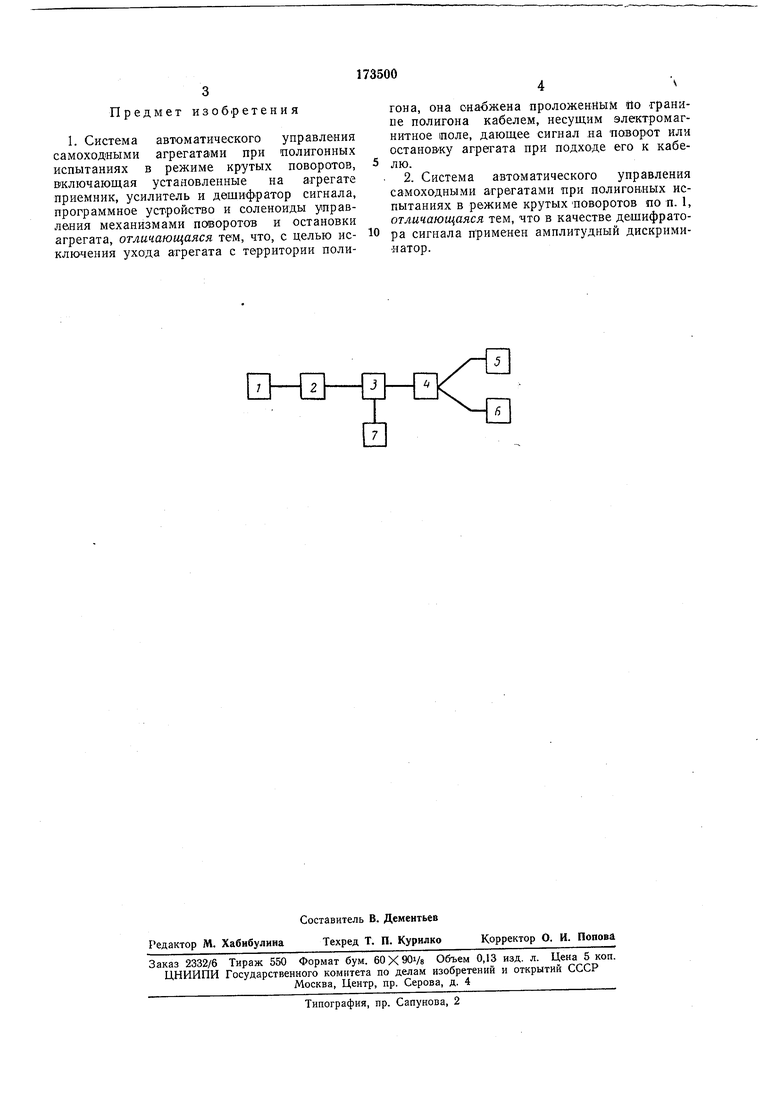
Па рисунке представлена блок-схема предложенной системы автоматическо1го управления, включающая приемник / сигнала, усилитель 2 его, амплитудный дискриминатор 3, программное устройство 4, соленоиды управления .механизмами поворотов 5, 6 и соленоид управления механизмом остановки агрегата 7. По полиго на проложен кабель, к которомуподключен генератор низкой частоты.
подходит к его границе. Приемник / получает от проложенного -по границе кабеля сигнал, который .после усиления его усилителем 2 подается на амплитудный дискри минатор 3,
имеюпшй два выхода. Один выход, с меньшей а.чплитудой сигнала, является входным для программного устройства 4, которое обеспечивает программу проведения испытаний: либо проведение чередующихся одиночных правых
и левых поворотов, либо чередующихся определенных групп таких поворотов. Программное устройство выдает команду на исполнение, например левого поворота, соленоиду 6, причем вре.мя осуществления поворота выставляется соответствующей установкой на программном устройстве, в зависимости от вида агрегата.
После поворота агрегат движется прямолинейно до следующего приближения к кабеj:io, после чего выполняет правый поворот и т. д.
Если по какой-либо причине при выходе к границе полигона испытываемый агрегат «е начнет поворота, то при его дальнейщем приближении к кабелю возрастет уровень сигнала на входе дискриминатора, который направит этот сигнал на соленоид управления механизмом остановки агрегата.
Предмет изоб|ретения
1. Система авТОматического управления самоходными агрегатами при полигонных испытаниях в режиме крутых поворотов, Включающая установленные на агрегате приемник, усилитель и дешифратор сигнала, программное устройство и соленоиды управления механизмами поворотов и остановки агрегата, отличающаяся тем, что, с целью исключения ухода агрегата с территории полигона, она снабжена проложенным По Гранине полигона кабелем, несущим электромагнитное иоле, дающее сигнал на поворот или остановку агрегата при подходе его к кабелю.
2. Система автоматического управления самоходными агрегатами при полигонных испытаниях в режиме крутых поворотов по п. 1, отличающаяся тем, что в качестве дешифратора сигнала применен амплитудный дискриминатор.