iJ
if - 5
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ КУРСОВОГО УГЛА САМОХОДНЫХ МАШИН | 1973 |
|
SU377616A1 |
| Система управления движением самоходного агрегата при полигонных испытаниях | 1980 |
|
SU888080A1 |
| Устройство для управления движением самоходного кабелеукладчика | 1986 |
|
SU1368861A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМ | 1973 |
|
SU385548A1 |
| Устройство для управления движением тягового средства прицепного кабелеукладчика | 1985 |
|
SU1308989A1 |
| Индукционная система дублерного вождения машинно-тракторных агрегатов | 1984 |
|
SU1246911A1 |
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |

со
О5
со
О5
со
работу индукционных дальномеров, датчика угла поворота ведомого агрегата, источника эталонного сигнала и блока вычитания интервального расстояния, причем выход одного из дальномеров через делитель, управляемый усилителем с автоматической регулировкой усиления этого дальномера, соединен с соответствующими входами блоков вычитания эквидистантного и интервального расстояний, а выход другого дальномера через делитель, управляемый усилителем с автоматической регулировкой усиления этого дальномера, подключен к другому входу блока вычитания эквидистантного расстояния, отличающееся тем, что, с целью повышения точности, оно снабжено дополнительными делителями, блоком вычитания и усилителем с автоматической регулировкой усиления, выполненным на соединенных в кольцо двух управляемых делителях и усилителях прямого и обратного трактов, приИзобретение относится к сельскому хозяйству, в частности к системам вождения самоходных мащинно-тракторных- агрегатов.
Цель изобретения - повышение точности.
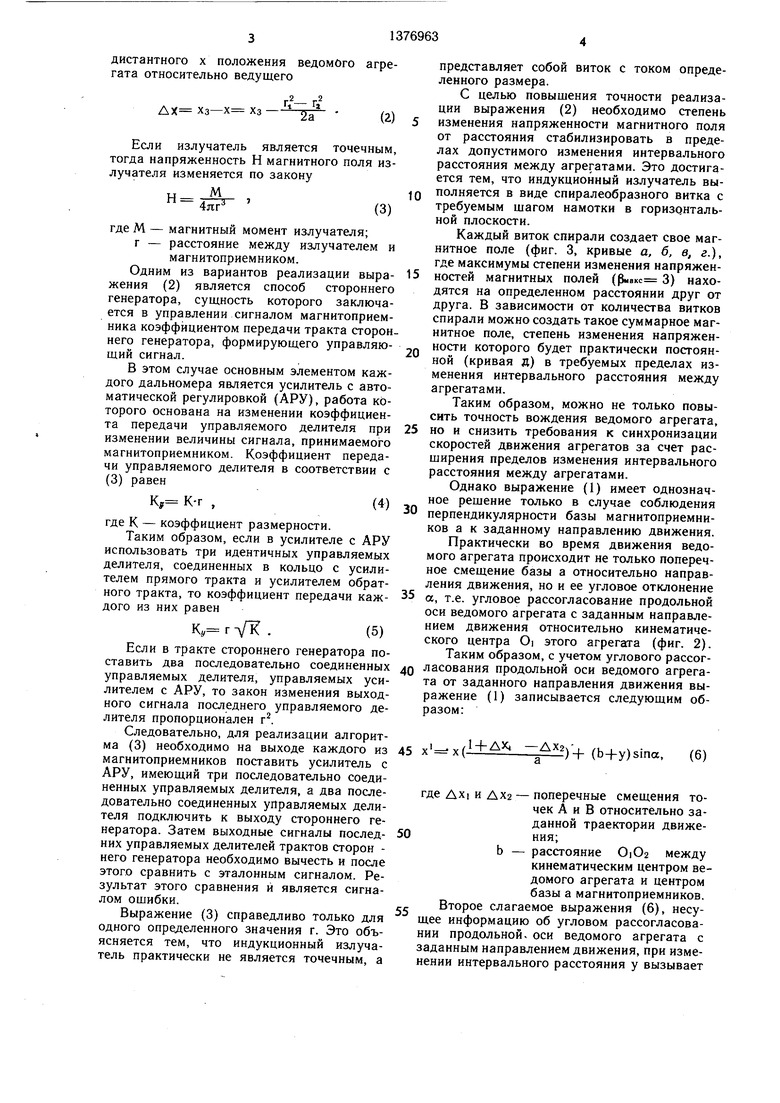
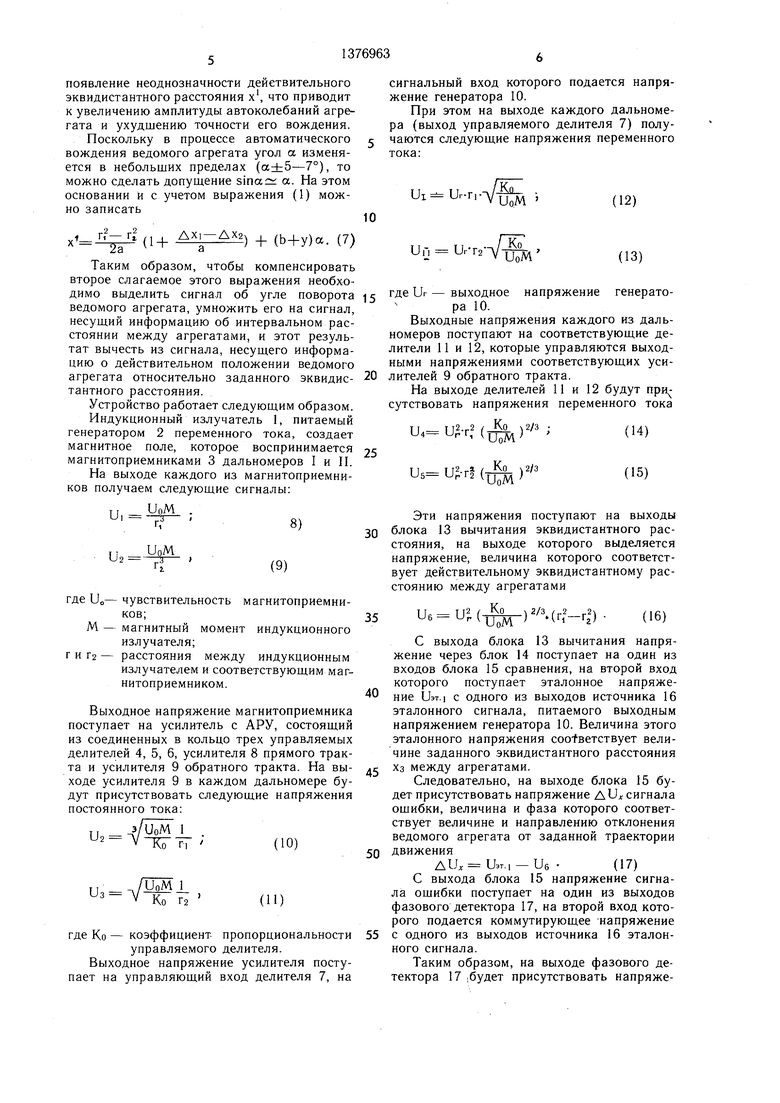
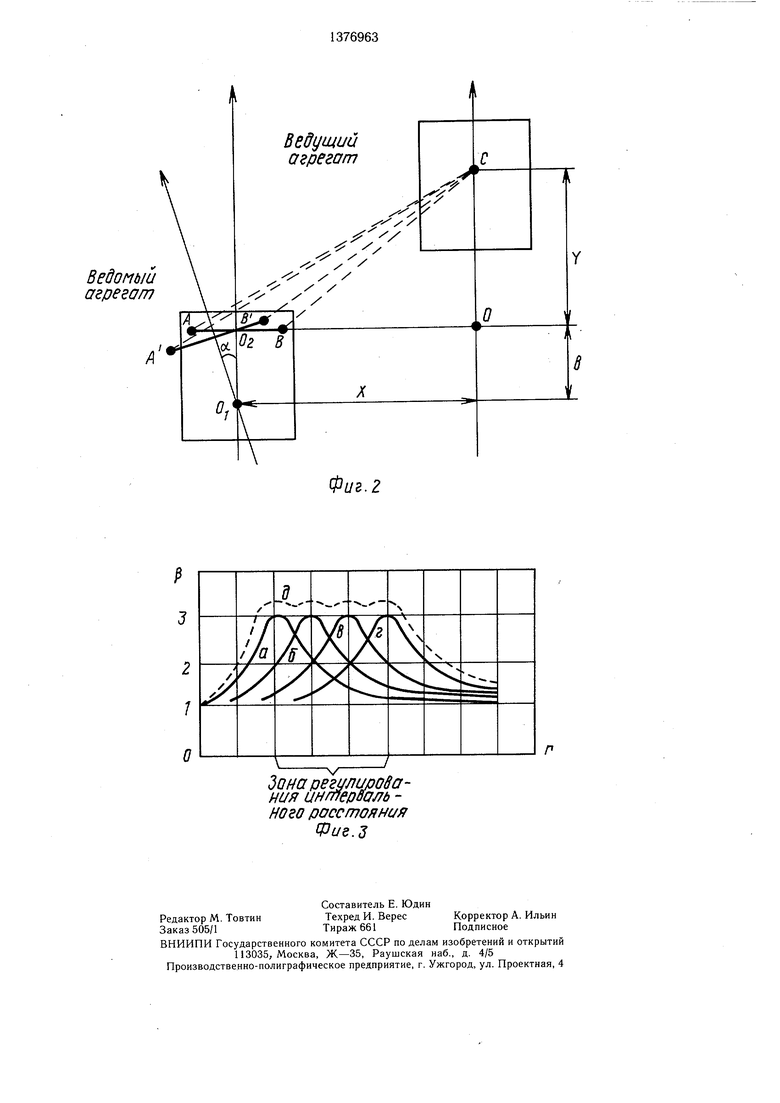
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - взаимное расположение излучателя и магнитоприемников на ведуще.м и ведомом агрегатах; где А и В - точки установки магнитоприемников на ведомом агрегате; С - точка установки индукционного излучателя на ведущем агрегате; АВ АО2+ ВО2 a/2-f а/2 а - база магнитоприемников; Oi - кинематический центр ведомого агрегата;.а - угол поворота базы магнитоприемников (продольной оси ведомого агрегата) относительно заданного направления движения; АС Г|, ВС Га; А иВ - точки расположения магнитоприемников после поворота ведомого агрегата на угол а; А С г ; ВС г, Ь OiO2 - расстояние между кинематическим центром ведомого агрегата и центром базы магнитоприемников; х, у - соответственно эквидистантное и интервальное расстояние между агрегатами; на фиг. 3 - зависимость изменения степени напряженности магнитного поля от расстояния г до излучателя, где р - степень напряженности магнитного поля; г - расстояние от точки наблюдения до центра излучателя, а, б, в, г - кривые, показывающие зависимость изменения степени напряженности магнитного поля от расстояния отдельных витков спичем вход этого усилителя соединен с выходом блока вычитания интервального расстояния, а выход - с управляющим входом первого дополнительного делителя, сигнальный вход которого подключен к одному из выходов генератора, а выход - к одному из входов блока сравнения интервального расстояния и через выпрямитель - к управляющему входу второго дополнительного делителя, сигнальный вход которого подключен к выходу датчика угла поворота ведомого агрегата, а выход - к одному из входов дополнительного блока вычитания, второй вход которого соединен с выходом блока вычитания эквидистантного расстояния, а выход - с входом блока сравнения эквидистантного расстояния.
ралеобразного излучателя; д - кривая, показывающая зависимость изменения степени суммарной напряженности магнитного поля спиралеобразного излучателя от рас- 5 стояния.
Устройство состоит из индукционного излучателя 1, расположенного непосредственного на агрегатах, генератора 2 переменного тока, двух индукционных дальноQ меров I и II, в состав которых входят маг- нитоприемники 3, управляемые делители 4-7 усилители 8 прямого тракта и усилители 9 обратного тракта. В устройство входит также; генератор 10, управляемые делители 11 и 12, блок 13 вычитания эквидистант5 ного расстояния, блок 14 вычитания, блок 15 сравнения эквидистантного расстояния, источник 16 эталонного cигнa Ia, фазовый детектор 17, блок 18 вычитания интервального расстояния, управляемые делители 19 и 20, усилитель 21 прямого тракта, усилитель 22
обратного тракта, делитель 23, блок 24 сравнения интервального расстояния, фазовый детектор 25, выпрямитель 26, делитель 27 и датчик 28 угла поворота. Из фиг. 2 видно, что
X (i;
где X эквивалентное расстояние между агрегатами, не зависящее, от интервального у расстояния между ними.
Сигнал ощибки Лх выделяют как разность заданного хз и действительного эквидистантного х положения ведомого агрегата относительно ведущего
АХ хз-х хз -
Если излучатель является точечным, тогда напряженность Н магнитного поля излучателя изменяется по закону
М
Н
(3)
где М - магнитный момент излучателя; г - расстояние между излучателем и магнитоприемником.
Одним из вариантов реализации выражения (2) является способ стороннего генератора, сущность которого заключается в управлении сигналом магнитоприем- ника коэффициентом передачи тракта стороннего генератора, формирующего управляющий сигнал.
В этом случае основным элементом каждого дальномера является усилитель с автоматической регулировкой (АРУ), работа которого основана на изменении коэффициента передачи управляемого делителя при изменении величины сигнала, принимаемого магнитоприемником. Коэффициент передачи управляемого делителя в соответствии с (3) равен
К, К-г
где К - коэффициент размерности.
Таким образом, если в усилителе с АРУ использовать три идентичных управляемых делителя, соединенных в кольцо с усилителем прямого тракта и усилителем обратного тракта, то коэффициент передачи каждого из них равен
К, г V .(5)
Если в тракте стороннего генератора поставить два последовательно соединенных управляемых делителя, управляемых усилителем с АРУ, то закон изменения выходного сигнала последнего управляемого делителя пропорционален г.
Следовательно, для реализации алгоритма (3) необходимо на выходе каждого из магнитоприемников поставить усилитель с АРУ, имеющий три последовательно соединенных управляемых делителя, а два последовательно соединенных управляемых делителя подключить к выходу стороннего генератора. Затем выходные сигналы последних управляемых делителей трактов сторон - него генератора необходимо вычесть и после этого сравнить с эталонным сигналом. Результат этого сравнения и является сигналом ошибки.
Выражение (3) справедливо только для одного определенного значения г. Это объясняется тем, что индукционный излучатель практически не является точечным, а
представляет собой виток с током определенного размера.
С целью повышения точности реализации выражения (2) необходимо степень 5 изменения напряженности магнитного поля от расстояния стабилизировать в пределах допустимого изменения интервального расстояния между агрегатами. Это достигается тем, что индукционный излучатель вы- JQ полняется в виде спиралеобразного витка с требуемым щагом намотки в горизонтальной плоскости.
Каждый виток спирали создает свое магнитное поле (фиг. 3, кривые а, б, в, г.), где максимумы степени изменения напряжен- 15 ностей магнитных полей (Р«якс 3) находятся на определенном расстоянии друг от друга. В зависимости от количества витков спирали можно создать такое суммарное магнитное поле, степень изменения напряжен- - ности которого будет практически постоянной (кривая д) в требуемых пределах изменения интервального расстояния между агрегатами.
Таким образом, можно не только повысить точность вождения ведомого агрегата, 25 но и снизить требования к синхронизации скоростей движения агрегатов за счет рас- щирения пределов изменения интервального расстояния между агрегатами.
Однако выражение (1) имеет однозначное рещение только в случае соблюдения 30 перпендикулярности базы магнитоприемников а к заданному направлению движения. Практически во время движения ведомого агрегата происходит не только поперечное смещение базы а относительно направления движения, но и ее угловое отклонение 35 а, т.е. угловое рассогласование продольной оси ведомого агрегата с заданным направлением движения относительно кинематического центра Oi этого агрегата (фиг. 2). Таким образом, с учетом углового рассог- 40 ласования продольной оси ведомого агрегата от заданного направления движения выражение (1) записывается следующим образом:
45 xWx()+ (b-l-y)sina.
(6)
где ДХ и ДХ2 - поперечные смещения точек А и В относительно заданной траектории движе- 50ния;
b - расстояние OiO2 между кинематическим центром ведомого агрегата и центром базы а магнитоприемников. „ Второе слагаемое выражения (6), несущее информацию об угловом рассогласовании продольной, оси ведомого агрегата с заданным направлением движения, при изменении интервального расстояния у вызывает
появление неоднозначности действительного эквидистантного расстояния х , что приводит к увеличению амплитуды автоколебаний агрегата и ухудшению точности его вождения. Поскольку в процессе автоматического вождения ведомого агрегата угол а изменяется в небольших пределах (а±5-7°), то можно сделать допушение sina; а. На этом основании и с учетом выражения (1) можно записать
, (1+ АХ,-АХ2) (ь+у)а. (7) /аа
Таким образом, чтобы компенсировать второе слагаемое этого выражения необходимо выделить сигнал об угле поворота ведомого агрегата, умножить его на сигнал, несуший информацию об интервальном расстоянии между агрегатами, и этот результат вычесть из сигнала, несушего информацию о действительном положении ведомого агрегата относительно заданного эквидис- тантного расстояния.
Устройство работает следующим образом.
Индукционный излучатель 1, питаемый генератором 2 переменного тока, создает магнитное поле, которое воспринимается магнитоприемниками 3 дальномеров I и II.
На выходе каждого из магнитоприемни- ков получаем следующие сигналы:
UoM
8)
и,
U2
(9)
где Uo- чувствительность магнитоприемников;М - магнитный момент индукционного
излучателя; г и Г2 - расстояния между индукционным
излучателем и соответствующим магнитоприемником.
Выходное напряжение магнитоприемника поступает на усилитель с АРУ, состоящий из соединенных в кольцо трех управляемых делителей 4, 5, 6, усилителя 8 прямого тракта и усилителя 9 обратного тракта. На выходе усилителя 9 в каждом дальномере будут присутствовать следующие напряжения постоянного тока:
U2
(10)
(11)
где Ко - коэффициент пропорциональности
управляемого делителя. Выходное напряжение усилителя поступает на управляющий вход делителя 7, на
сигнальный вход которого подается напряжение генератора 10.
При этом на выходе каждого дальномера (выход управляемого делителя 7) получаются следующие напряжения переменного тока:
ж:
UoM
Ui Ur-r,
(12)
иг, и,-Т2-Л/-сщ
(13)
где Ur - выходное напряжение генератора 10.
Выходные напряжения каждого из дальномеров поступают на соответствующие делители 11 и 12, которые управляются выходными напряжениями соответствующих усилителей 9 обратного тракта.
На выходе делителей 11 и 12 будут сутствовать напряжения переменного тока
U4 Шт.г
Ко 2/3
UoM
:i4)
U5 (UoM
v2/3
(15)
0
5
0
5
0
5
Эти напряжения поступают на выходы блока 13 вычитания эквидистантного расстояния, на выходе которого выделяется напряжение, величина которого соответствует действительному эквидистантному расстоянию между агрегатами
(-Шvг) () (16)
с выхода блока 13 вычитания напряжение через блок 14 поступает на один из входов блока 15 сравнения, на второй вход которого поступает эталонное напряжение иэт.1 с одного из выходов источника 16 эталонного сигнала, питаемого выходным напряжением генератора 10. Величина этого эталонного напряжения coofBeTCTByeT величине заданного эквидистантного расстояния хз между агрегатами.
Следовательно, на выходе блока 15 будет присутствовать напряжение ди сигнала ощибки, величина и фаза которого соответствует величине и направлению отклонения ведомого агрегата от заданной траектории движения
AU;,.,-U6 (17)
с выхода блока 15 напряжение сигнала ошибки поступает на один из выходов фазового детектора 17, на второй вход которого подается коммутирующее напряжение с одного из выходов источника 16 эталонного сигнала.
Таким образом, на выходе фазового детектора 17 .будет присутствовать напряжение сигнала управления, величина и знак которого несут информацию о величине и направлении отклонения ведомого агрегата от заданного эквидистантного расстояния между агрегатами.
Согласно фиг. 2 можно записать:
г| (х-а/2)Чу -(18)
С учетом выражений (15), (18) выходное напряжение управляемого делителя 12 можно записать в виде
(u) Mx-a/2) +
+ r(-).
и„м
(19)
Для выделения сигнала, пропорциональ- , ного интервальному расстоянию, выходное напряжение делителя 12 подается на один из входов блока 18, на второй вход которого поступает напряжение генератора 10, по величине равное первому слагаемому выражения (19).
Следовательно, на выходе блока 18 будет напряжение U, пропорциональное квадрату интервального расстояния
UT и ( ° 11
U7 - и ( ) (20)
На выходе дополнительного усилителя с АРУ будет напряжение постоянного тока
(21)
где К - коэффициент пропорциональности каждого из делителей 19 и 20.
Это напряжение подается на управляющий вход делителя 23, на сигнальный вход которого поступает напряжение переменного тока с одного из выходов генератора 10.
В результате этого на выходе делителя 23 получается напряжение переменного тока, имеющее обратно пропорциональную линейную зависимость от интервального расстояния между агрегатами
(22)
5
Это напряжение подается на один из входов блока 24 сравнения, на второй вход которого подается напряжение иэт.2 с одного из выходов источника 16 эталонного сигнала.
На выходе блока 24 получается напря0 жение AUy сигнала ошибки, величина и фаза которого соответствуют величине и направлению отклонения ведомого агрегата от заданного интервального расстояния ди,, иэт.2 -Ug .(23)
Это напряжение поступает на один из входов фазового детектора 25, на второй вход которого подается коммутирующее напряжение с одного из выходов источника 16 эталонного сигнала, а на выходе выделяется напряжение управления, величина и
0 знак которого несут информацию о величине и направлении отклонения ведомого агрегата от заданного интервального расстояния между агрегатами.
При появлении углового рассогласования между продольной осью ведомого агрегата и заданным направлением его движения выходное напряжение делителя 23 через выпрямитель 26 подается на управляющий вход делителя 27, на сигнальный вход которого поступает напряжение с датQ чика 28 угла поворота, несущее информацию об угле поворота а продольной оси ведомого агрегета относительно заданного направления движения.
На выходе делителя 27 пол -.ается напряжение Uio
35
- V&-y-a
(24)
Q где Ua - чувствительность датчика угла поворота;
Р - коэффициент размерности. Это напряжение подается на один из входов блока 14, где происходит коррекция выходного напряжения блока 13, несущего 45 информацию о действительном эквидистантном расстоянии между агрегатами.
Ведомый агрегат
Фиг.г
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНЫХ АГРЕГАТОВ | 0 |
|
SU399219A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Коммутатор многократного действия | 1981 |
|
SU1030873A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
