I
Изобретение относится к эпектротехнике и может быть использовано в эпектроприводе подъемно-транспортных механизмов с двумя двигателями..
Известно устройство для ограничения перекоса траверсы, содержащее синхронHbie двигатели, кинематически связанные с траверссй, ключи статора и источник постоянного TOKafli
Недостатком этого устройства является его 1мюпая эффективность при использовании в качестве асинхронного двигателя невозбуждаемого асинхронного двигателя в режиме динамического торможения с самовозбуждением.
Наиболее близким техническим решением является устройство, содержащее асинхронные двигатели, кинематически связанные с грузозахватной траверсой, ключи, через которые цепи статора подключены к источнику постоянного тока, выпрямители и ключи, посредством которых цепи ротора подключены к цепям статора, блок вьгавления величины и направления рассогласования пути, пороговые элементы и задатчик режима работы 2,
Недостатком данного технического решения является низкая надежность при спуске грузозахватной траверсы при наличии невозбуждаемых двигателей.
Целью изобретения является повышение надежности.
Цепь достигается тем, что в него дополнительно введены блоки Запрета, один
10 . из которьЕс выполнен с задержкой, и фазоЧуВСТВИТеЛЬНЫЙ блок, вход которого ПОРгключен к первому выходу блока выявления величины и направления рассогласования пути, а выходы- ко входу соответ
15 ствующих пороговых элементов,выходы пфоговьк элементов подключены к инверсным входам соответствующих блоков Запрета, прямые входы которых подключены к выходу датчика режима работы,
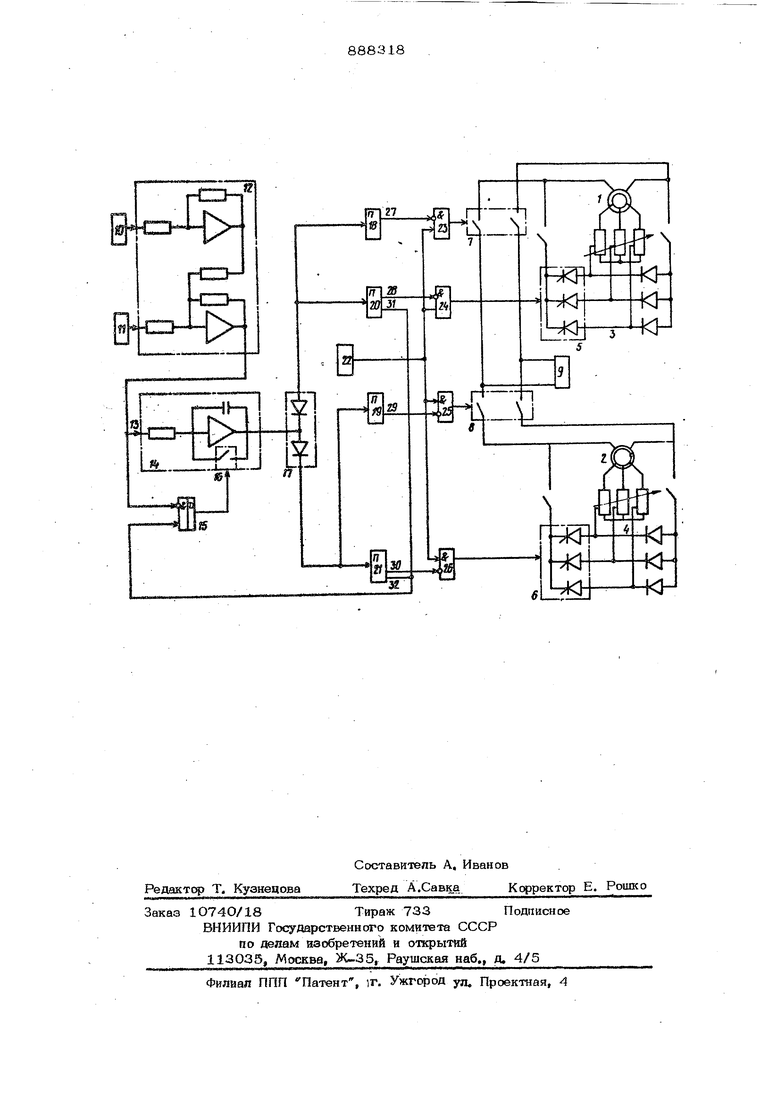
20 причем вторые выходы двух пороговых элементов подключены к прямому входу блска Запрета с задержкой, а второй вькод блока вьгавления величины и направ38ления рассогласования пути подключен к инверсному входу блока Запрета с задерж кой, выход которого подключен ко входу блока выявления величины и направления рассогласования пути. На чертеже приведена схема предлага мого устройства. Устройство для ограничения перекоса уруаозахватной траверсы при опускании груза содержит невозбуждаемые асинхрон ные двигатели 1, 2, кинемати чески связанные с грузозахватной траверсой (на чертеже не показана). Для получения режима динамического торможения двигателей 1, 2 вьшрямители 3, 4 подключаю ся к ротору двигателя 1, 2 посредством ключей 5, 6. Посредством ключей 7, 8 статора двигатели 1, 2 подсоединяют к .источнику 9 пocтoяннoгo тока. Датчики 10 и 11 скорости подключены к дифференцйальному блоку 12, который соединен с входом 13 интегратора 14 и инверсным входом блока 15 Запрета. Датчики Ю, 11 скорости, дифференциаль ный блок 12 и интегратор 14 образуют блок выявления величины и направления рассогласования пути. Блок 15 Запрета связан со вторым входом 16 интегратора 14, который через фазочувствительный блок 17 пол.ключен к пороговым элементам 18, 19, с уставкой верхнего уровня и пороговым элементам 2О, 21 с уставкой нижнего уровня. Задатчик 22 режима работы соединен с прямь1ми входами блоков 23-26 Запрета инверсные входы которых соеди нены с вькодами 27-30 элементов 1821. Блоки 23, 25 соединены с ключами 7, 8 стат(а, аблоки 24, 26 - с ключами 5, 6 ротора. Вторые выходы 31/ 32 элементов 2О, 21 соединены с прямым выходом блока 15. Устройство работает следующим образом. Устройство предназначено для ограничения перекоса грузозахватной ораверсы при ее спуске при невозбуждаёмых; асинхронньк двигателях. Как известно, в режиме динамическс го торможения с самрвозбуждениемасинкронный двигатель может возбуждаться выпрямленным током ротора при условии 7- ,Л) где 3 - эффективное значение эквивалентного трехфазного тока, соответ 84 ствующего величине выпрямленного тсжа в обмотке статора. ;з1 - значение тока ротора, приведенного к обмотке статора. Без учета конкретной электрическсй схемы это условие вьфажается как где U u --номинальные напряжения соответственно статора и ротора. При несоблюдении неравенства (l) или (2) режим динамического торможения при возбуждении двигателя только выпрямленньп 1 током ротора становится невозможным и тогда кроме выпрямленного тсжа ротора для возбуждения двигателя используют и дополнительный источник постоянного тска., при этом двигатель назьшают невозбуждаемым, а возбуждание двигателя - смешанным. При спуске грузозахватной траверсы двигатели 1, 2 работают в режиме динеьмического торможения при смешанном возбуждении, при этом сигнал на выходе задатчика 22 равен логической единице, . на вькоде пороговых элементов 18...21- логическому нулю, сигнал на выходе блсжов 23-26 равен логической единице и ключи 5-8 замкнуты. Сигнал на вььходе блока 12 пропорционален разности скф остей двигателей 1, 2, а на выходе интегратора 14 - разнице путей, прейденными противоположными концами гру- зозахватной траверсы за время работы Тштегратора 14. При достижении задан ного перекоса срабатьшает пороговый элемент 20 (или 21) двигателя 1 (или 2) с меньшей скоростью, при этом на инверсный вход блока 21 поступает сигнал, равный логическгаК единице, сигнал на выходе блока 24 становится равным логическому нулю и ключ 5 размыкает ся. Двигатель 1 начинает работать с подпиткой цепи статора только от источника 9 , при этом тормозной момент двигателя 1 уменьшается, скорость возрастает И устраняется перекос траверсы. При уменьшении перекоса до заданного зн чёния, сигнал на выходе блока 12 умень шается до величины, при которой сигнал на инверсном входе блока 15 становится равным логическому нулю. Поскольку сйг нал на прямом входе блока 15 равен логической единице (сработал элемент 20), то блок 15 срабатьшает и на вход 16 интегратора 14 подается сигнал, равный логической единице, при этом происходит сброс напряжения на выходе интег ратора 14 (например, закорачивается конденсатор в интеграторе на операционном усилителе) и элемент 20 возвращает ся в исходное положение, ключ 5 замьькается, сигнал на выходе блока 15 снова становится равен логическому нулю и интегратор 14 готов к работа.. В случае, если перекос траверсы (например, из-за несимметричного подвеса груза) при разомкнутом ключе 5 продолжает расти., то срабатьтает элемент 18 и через блок 23 отключает ключ 7, при I этом тормозной момент двигателя 1 naдает до нудя и перекос траверсы умень- ;шается до заданного значения. Фушадиональная схема при этом работает аналогично описанному выше случаю. Таким образетл, устрсйство ограничивает перекос грузозахватной траверсы при ее спуске. В зависимости от величины перекоса отключается сначала цепь ротсра от цепи статора, а затем, если перекос продолжает расти, отключается цепь независимого возбуждения двигателя Впагооаря укаэаннсА конструкции повысилась на жностъ устройства. Формула изобретени-я Устройство для ограничения перекоса грузозахватной траверсы при опускании груза, содержащее асинхрсжные двагатели, кинематически связанные с грузо вахватнсА траверсе, ключи, через кото рые цепв статора подклютхены к источни«г ку постоянного тсжа, вьлрямители и , посредством кото{эых цепи ротора подключены к цепяк статора, блок выявления величины и направления рассогласования пути, пороговые элементы и задатчик режима работы, отличающее с я тем, что, с целью повышения надежности его в работе, в него дополнительно введены блоки Запрета, один из которых выполнен с задержкой, и фазочувствитвльный блок, вход которого подключен к первому выходу блока вьгявля- ння величшы и направления рассогласования пути, а выходы - ко входу соответствующих noporoBbix элементов, выходы пороговых элементов подключены к инверсным входам соответствующих блоков Запрета, прямые входы которых под-, ключены к выходу задатчика режима работы, причем вторые выходы двух пороговьрс элементов подключены к прямому входу блока Запрета с задержкой, а вто. рой выход блока выявления величины и направления рассогласования пути поПеключен к инверсному входу блока Запре та, с задержке, выход которого подключен ко входу блока вьгавления величины в направ;юнйя рассогласования пути. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР . N 2415О8, кл. Н О2 Р 7/76, 1966. 2.Современные системы управления подъемно-транспортными машинами. М., 1977, фиг 5, в, с. 11-15. Обзорная инфч мацвя НИИИНФОРМТЯЖМАШ. A--Щ . 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным двигателем | 1978 |
|
SU773877A1 |
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для управления вентильнымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU843121A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634997C2 |
| Электропривод переменного тока | 1981 |
|
SU1001417A1 |
| Устройство для управления главным приводом клети непрерывного прокатного стана | 1978 |
|
SU738707A1 |