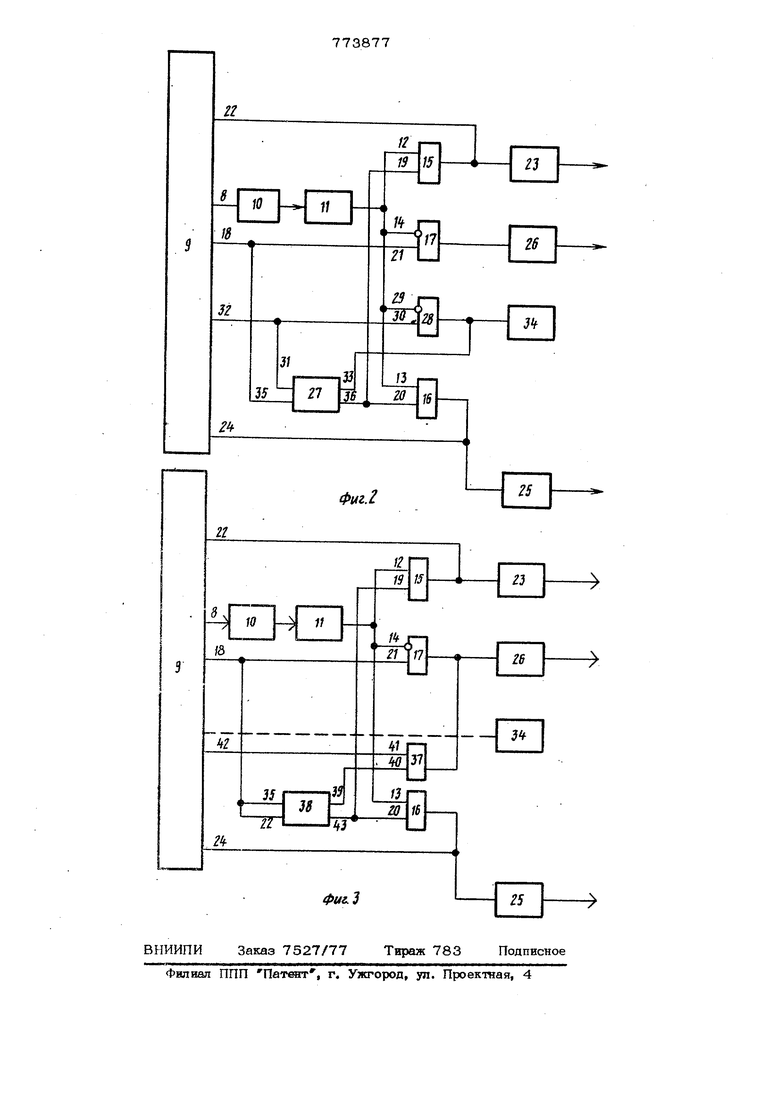
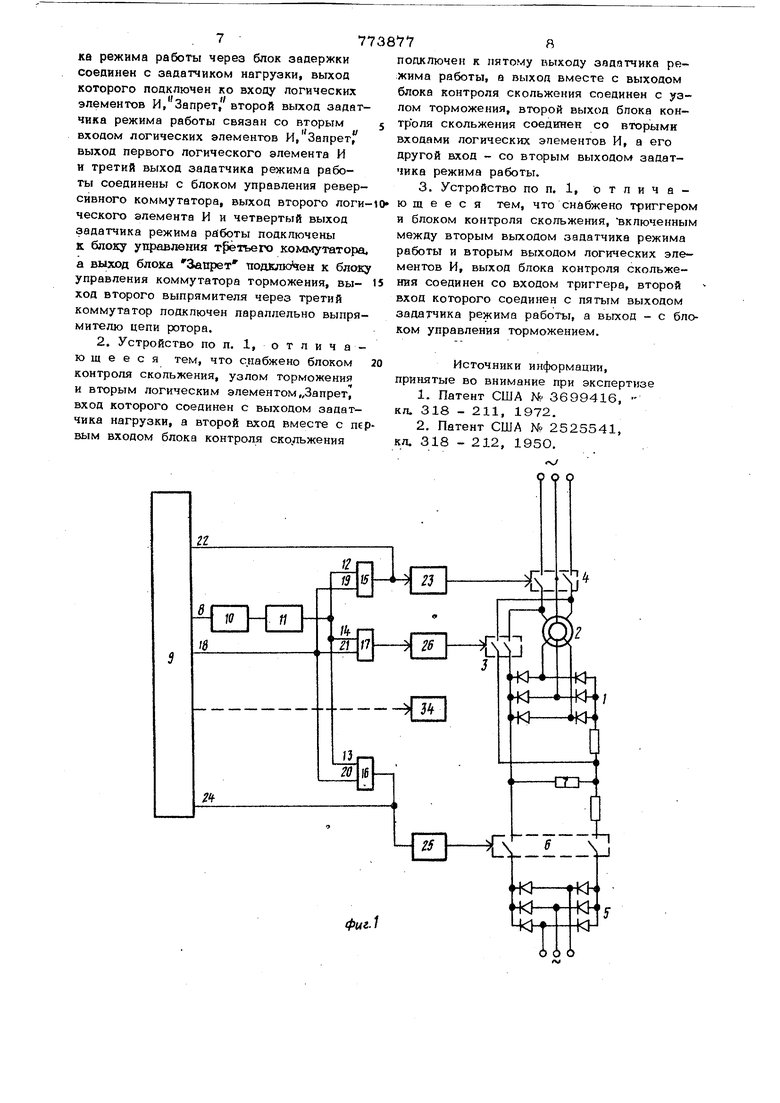
Изобретение относится к электротехнике и может быть ислопьзовано в при- водах механизма подъема крана. Известно устройство для управления асинхронным двигателем содержащее выпрямитель в цепи ротора, выход которого подключен через коммутатор к двум обмоткам статора двигателя н выпрямитель, подключенный к источнику переменного тока, выход которого под-, ключей к резистору ГЛ. Недостатком известных устройств являются ограниченные возможности регулирования скорости вращения двигател позволяющие однозначно получить пониженные скорости только при опускании груза или его подъеме в крановом механизме. Наиболее близким к предлагаемому по технической сущности является усьройство для управления асинхронным дви гателем, содержащее реверсивный коммутатор в цепи обмоток статора, выпрямитель в цепи роторя двигателя, выход которого подключен к резистору и через коммутатор торможения - к двум обмоткам статора, второй выпрямитель, подключенный к источнику переменного тока, выход которого через третий коммутатор подключен параллельно выпрямителю цепи ротора, задатчик режима работы и блоки управления коммутаторами торможения, реверса н третьим коммутатором, подключенные к выходу задатчика режима работы двигателя 2. Недостатком известного устройства являются ограниченниые функциональные возможности в связи с тем, что при малом значении момента сопротивления получение пониженной скорости вращения двигателя затруднительно, а также его недостаточная надежность при переходе на другую скорость вращения. Цель изобретения - расширение функциональных возможностей устройства и повышение его надежности. Указанная цель достигается тем, что устройство для управления асинхронным 377 двигателем, соаержащее реверсивный коммутатор в цепи обмоток, выпрямитель в цепи ротора двигателя, выход которого подключен к резистору и через коммутатор торможения - к двум обмоткам статора, второй выпрямитель, подключе1шый к источнику перемешюго тока, аадатчнк режима работы и блоки утфавления коммутаторами торможе1шя, реверса и третьим кок мутатором, введены блок задержки, задат чик нагрузки и логические алекенты И, Затфет, причем выязд задатчика режима работы через блок задержки соединен с за датчиком нагрузки, выход которого подключен ко входу логических элементов И, Запрет, второй выход задатчика режилт работы связан со вторым входом логичес ких элементов И Запрет, выход первого логического элемента И и третий выход задатчика режима работы соединены с блоком управления реверсивного коммутатора, выход второго логического элемен та И и четвертый выход задатчика режима работы подключены к блоку управления третьего коммутатора, а выход блока Зап рет подключен к блоку управления коммутатора торможения, выход второго выпрям теля через третий коммутатор подключен параллельно выпрямителю цепи ротора. Устройство может быть снабжено блоком контроля скольжения, узлом торможения и вторым логическим элементомЗапрет, вход которого соединен с выходом задатчика нагрузки, а второй вход вместе с первым входом блока контроля скольжения подключен к пятому выходу задатчика режима работы, а выход вместе с выходом блока контроля скольжения соединен с узлом торможения, второй выход блока контроля скольжения соединен со вторыми входами логических элементов И, а его друго вход - со вторым выходом задатчика ре жима работы. Устройство может быть снабжено триггером и блоком контроля скольжения, вклю ченным между вторым выходом задатчика режима работы и вторым выходом логичес ких элементов И, выход блока контроля скольжения соединен со входом триггера, второй вход которого соединен с пятым выходом задатчика режима работы, а выход - с блоком управления торможением. На фиг. 1 изображена силовая и функцио нальная схемы устройства; на фиг.2 - узе функциональной схемы устройства с блоком контроля скольжения; на фиг 3 - узел фун 7 циональной схемы с блоком контроля скольжения и триггером. Устройство для торможения асинхронного двигателя содержит роторный выпрямитель 1, связанный со статором двигателя 2 через коммутатор 3 торможения.Реверсивный коммутатор 4 расположен в цепи статора двигателя 2. Выпрямитель 5 соединен с третьим коммутатором 6. Резистоп 7 подключен к выпрямителям 1 и 5. Выход 8 задатчика 9 режима работы через блок 1О задержки соединен с задатчиком 11 нагрузки, выход которого подключен ко входу 12-14 логических элементов И 15, 16 и Затфет 17. Второй выход 18 задатчика 9 связан со вторым входом 19-21 элементов 15-17. Выход элемента 15 и третий выход 22 задатчика 9 соединены с блоком 23 управления реверсивным коммутатором 4. Выход второго элемента 16 и четвертый выход 24 задатчика 9 подключены к блоку 25 управления третьим коммутатором. Выход элемента 17 подсоединен к блоку 26 управления коммутатором 3 торможения. Устройство (фиг.2) может быть снабжено блоком 27 контроля скольжения и вторым логическим элементом Запрет , 28, вход 29 которого связан с выходом задатчика 11, второй вход ЗО вместе со входом 31 блока 27 подключен к пятому выходу 32 задатчика 9, а выход вместе с выходом 33 блока 27 связан с блоком 34 управления узлом торможения. Между вторым входом 19, 20 элементов 15, 16 и вторым выходом 18 захватчика 9 включен блок 27 (выводы 35, 36). Устройство (фиг.З) может быть снабжено триггером 37 и блоком 38 контроля скольжения, включенным между вторым выходом 18 задатчика 9 и вторым выходом 19, 2О элементов 15, 16.Выход 39 бпока 38 соединен со входом 40 триггера 37, второй вход 41 которого соединен с пятым выходом 42 задатчика 9, а выход - с блоком 26. Устройство работает следующим образом. При работе двигателя на естественной характеристике сигнал поступает с выхода 22 задатчика 9 на блок 23, который замыкает коммутатор 4. При переходе на характеристику с малой скоростью спуска груза подается сигнал с выходов 8 и 18 задатчика 9, при этом блок 10 задержки принудительно на время переходного процесса устаиавЛйвает аадатчик 11 нагрузки в положение соответстзутощее большой нагрузке (сигнал на выходе задатчика 11 равен логическому нулю). Данный сигнал на выходе задатчика 11 устанавливает элементы И 15, 16 в положение, при котором сигнал на их выходе равен нулю (коммутаторы 4, 6 разомкнуты). Нулевой сигнал на ин- версном входе 14 элемента Запрет 17 и сигнал, равный логической единице на выходе 18 задатчика & разрешают блоку 26 замкнуть коммутатор 3. В резупьтате двигатель 2 начинает работать в режиме динамического торможения с са- is мовозбуждением и происходит торможение двигателя до скорости, соответствующей характеристике на позиции динамического торможения при данном моменте статической 1тгрузки, По окончании действия бло- 20 Ка 10 задержки сигнал на выходе задатчика 11 может стать равным лошческой единице (если Нагрузка двигателя недостаточна для вращения двигателя и для осуществле- ния спуска груза с малой скоростью необ.-25 ходимо перейти в режим силового спуска с противоэдс в цепи ротора). Если сигнал на выходе задатчика 11 становится равным логическбй единице, то сигнал на выходе элемента 17 становится равным нупю ЗО и коммутатор 3 размыкается. Сигнал же на выходах элементов 15 и 16 становится равным единщ1е и блоки 23 и 25 замыкаюткоммутаторы 4 и 6, осуществляя режим работы двигателя на противоэдс 35 в цепи ротора. В указанном приводе в силу определенных причин (изменения коэффициента трения, притирания или перекоса тормозов о и т.д.) статический момент сопротивления движению при спуске груза может измениться (уменьшится). При этом двигатель начинает увеличивать скорость, что может привести к аварийной ситуации. На фиг.2 приведена дополнительная схема, согласно которой в режиме силового спуска с противоэдс в цепи ротора блок 27 контролирует скольжение двигателя 2. При больших скольжениях что соот- «д ветствует нормальному режиму работы, блок 27 пропускает сигналы с выходов 18 и 32 задатчика 9 и устройство функпионирует как было описано выше. При уменя шении скольжения двигателя в рассматрн- , ваемом режиме блок 27 срабатывает и на его выходах 33 и 36 сигнал становится равным логическому нулю. В результате сигнал нп выхопг узлов 15 и 16 стано,, вится равным пупю и блоки 23 и 25 размыкают коммугяторь. 4 н в. В рассматриваемом режиме силового спуска с противоэцс в цепи роторч сигнал на выходе задатчика 11 равен логнческой един1ще и элемент 17 закрыт, поэтому при логическом нуле блок 34 накладывает тормозное устройство (механическое) и двигатель 2 затормаживается, предотвращая аварийное увеличение скорости. Указанное устройство не может быть применено в приводах ряда кранов изза перерыва технологического процесса при срабатывании зашиты, В этом случде может быть применено устройство с дополнительной схемой (см.фнг.З), в которой при срабатывании блока 38 контроля скольжения в режиме силового спуска с противоэдс в цепи ротора на выходе 43 сигнал становится равным логическому нулю, что приводит к исчезновению сигнала на выходе элементов 15, 16 и размыканию коммутаторов 4 и 6. При срабатывании блока 38 изменяется сигнал на выходе 39, что приводит к изменению состояния триггера 37, сигнал на его выходе становится равным логической единице и блок 26 замыкает коммутатор 3, осуществляя спуск груза в режиме динамического торможения с заданjjQg скоростью. При изменении режима работы двигателя 2 от задатчика 9 сигнал цд выходе 42 возвращает триггер 37 в исходное состояние, Устройство позволяет изменять скорость вращения двигателя в широком диапазоне вне зависимости от статического момента на его валу при высокой надежности его работы. Формула и з.о бретения 1. Устройство для управ юния асинхронным двигателем, содержащее реверсивный коммутатор в цепи обмоток статора, выпрямитель в цепи ротора двигателя, выход которого подключен к резистору и через коммутатор торможения к двум обмоткам статора, второй вып- рямитель, подключенный к источнику переменного тока, третий коммутатор, эадатчик режима работы и блоки управления коммутаторами торможения, реверса и третьим коммутатором, отлич ающ е е с я тем, что. с целью повышения надежности, в него введены блок задержки, задатчик нагрузки и логические элементы И,Запрет, причем выход задатчика режима работы через блок задержки соединен с зядатчиком нагрузки, выход которого подключен ко входу логических элементов И, Запрет, второй выход за датчика режима работы связан со вторым входом логических элементов И,Запрет, выход первого логического элемента И и третий выход задатчика режима работы соединены с блоком управления реверсивного коммутатора, выход второго логического элемента И и четвертый выход задатчика режима работы подключены к блоку управления третьего коммутатора.
а выход блока Запрет тгодкгаоЦген к блоку управления коммутатора торможения, выход второго выпрямителя через третий коммутатор подключен параллельно выпрямителю цепи ротора.
2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что снабжено блоком контроля скопьжения, узлом торможения и вторым логическим элементом „Запрет, вход которого соединен с выходом задатчика нагрузки, а второй вход вместе с певым входом блока контроля ско.льжения
подключен к пятому выходу задатчика ре;Жима работы, а выход вместе с выходом блока контроля скольжения соединен с узпом торможения, второй выход блока кон- трЪля скольжения соединен со вторыми входами логических эпементов И, а его другой вход - со вторым выходом задатчика режима работы.
3. Устройство по п. 1, отличающееся тем, что снабжено триггеро и блоком контроля скольжения, включенны между вторым выходом задатчика режима работы и вторым выходом логических элементов И, выход блока контроля скольжения соединен со входом триггера, второй вход которого соединен с пятым выходом задатчика режима работы, а выход - с блком управления торможением.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3699416, кл. 318 - 211, 1972.
2.Патент США N 2525541, кл. 318 - 212, 195О.
f С Q О
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ограничения перекоса грузозахватной траверсы при опускании груза | 1979 |
|
SU888318A1 |
| Электропривод для грузоподъемного механизма | 1980 |
|
SU989719A2 |
| Устройство для динамического торможения асинхронного электродвигателя | 1980 |
|
SU868959A1 |
| Реверсивный тиристорный электропривод переменного тока | 1976 |
|
SU738087A1 |
| Электропривод переменного тока | 1981 |
|
SU1001417A1 |
| Электропривод переменного тока | 1980 |
|
SU955482A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| Электропривод для грузоподъемного механизма | 1979 |
|
SU860246A1 |
| Электропривод переменного тока | 1983 |
|
SU1128362A1 |