1
Изобретение относится к машиностроению и может быть использовано в автомобильной и тракторной промышленностях.
По основному авт. св. № 795986 известна подвеска транспортного средства, содержащая верхний рычаг, внутренним концом шарнирно закрепленный на подрессоренной массе транспортного средства, а внешним - на верхнем конце вертикальной стойки, кинематически связанной с неподрессоренной массой, нижний конец которой шарнирно соединен с внешним концом нижнего рычага, внутренний конец которого закреплен на подрессоренной массе, упругий элемент подвески, установленный между нижним рычагом и подрессорной массой 1.
Недостатком данной подвески является сложность в компоновочном отношении изза неудобства расположения упругого элемента подвески между упомянутыми рычагами и недостаточная плавность хОда.
Известна подвеска транспортного средства, содержашая верхний и нижний рычаги, внутренними концами шарнирно закрепленные на подрессоренной массе транспортного средства, а внешними - соответственно на верхнем и нижнем концах неподрессоренной стойки, кинематически связанной с неподрессоренной массой, упругий элемент, расположенный на подрессоренной массе, связанный посредством гибкой связи с одним из упомянутых рычагов подвески, преобразователь направления действия усилия гибкой связи, установленный на подрессоренной массе и кинематически взаимодействующий с гибкой связью на участке между упругим элементом подвески и непосредственной массой транспортного средства 2.
Однако у указанного изобретения недостаточная плавность хода транспортного средства.
Цель изобретения - улучшение плавности хода, путем получения нелинейных характеристик подвески.
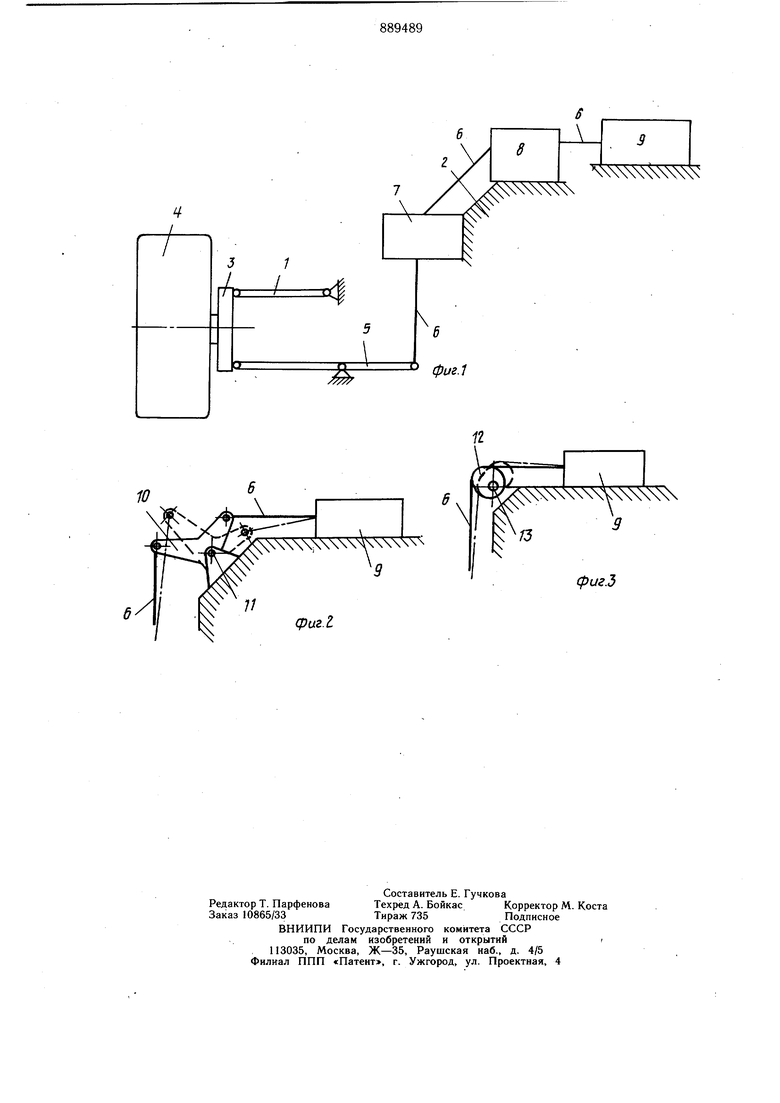
Поставленная цель достигается тем, что подвеска снабжена регулятором величины усилия гибкой связи, установленным на подрессоренной массе и кинематически связанным с гибкой связью на участке между упругим элементом подвески и неподрессоренной массой транспортного средства. Регулятор величины усилия и преобразователь направления действия усилия гибкой связи выполнены в виде двуплечего рычага с плечами различной длины, расположенными под углом друг к другу, причем ось двуплечего рычага кинематически связана с подрессоренной массой транспортного средства. Регулятор величины усилия и преобразователь направления действия усилия гибкой связи выполнены в виде профилированного эксцентричного ролика, ось которого кинематически связана с подрессоренной массой транспортного средства. С целью изменения характеристики подвески в процессе эксплуатации в зависимости от условий движения плечи гибкой связи выполнены регулируемыми по длине. На фиг. 1 изображена принципиальная схема подвески транспортного средства; на фиг. 2 - один из вариантов конструктивного выполнения регулятора величины усилия гибкой связи и преобразователя направления действия усилия гибкой связи - двуплечий рычаг (в двух положениях); на фиг. 3другой вариант конструктивного исполнения регулятора величины усилия гибкой связи - эксцентричный профилированный ролик (в двух положениях). Подвеска транспортного средства содержит верхний рычаг 1, внешним своим концом шарнирно закрепленный на подрессоренной массе 2 транспортного средства, вертикальную стойку 3, кинематически связанную с неподрессоренной массой 4, нижний рычаг 5, щарнирно закрепленный на подрессоренной массе и связанный с вертикальной стойкой и посредством гибкой связи 6 через преобразователь 7 направления действия усилия гибкой связи установленный на подрессоренной массе, и регулятор 8 величины усилия гибкой связи, установленный на подрессоренной массе с упругим элементом 9 подвески. Преобразователь 7 направления действия усилия гибкой связи и регулятор 8 величины усилия гибкой связи могут быть выполнены, например, в виде двуплечего рычага 10, ось 11 которого щарнирно закреплена на подрессоренной массе 2 транспортного средства, а регулятор 8 величины усилия гибкой связи выполнен в виде профилированного эксцентричного ролика 12, ось 13 которого кинематически связана с подрессоренной массой 2 транспортного средства. При взаимном перемешении элементов подвески нижний рычаг 5 взаимодействует посредством гибкой связи 6 через преобразователь 7 направления действия усилия гибкой связи и регулятор 8 величины усилия гибкой связи с упругим элементом 9, деформируя его. Преобразователь 7 направления действия усилия гибкой связи совместно с регулятором 8 величины усилия гибкой связи позволяет менять направление и величину усилия гибкой связи, что обеспечивает возможность получения нелинейных характеристик подвески при линейной характеристике упругого элемента и упрощает компоновку подвески транспортного средства. Таким образом, достигается возможность использования упругого элемента с любой характеристикой для получения желаемой характеристики подвески. В процессе эксплуатации при изменении условий движения можетвозникнуть необходимость изменить характеристику подвески. Это достигается изменением начального углового положения регулятора при соответствующем изменении длин плеч гибкой связи. Формула изобретения 1. Подвеска транспортного средства по авт. св. № 795986, отличающаяся тем, что, с целью улучшения плавности хода путем получения 1 елинейных характеристик подвески, она снабжена регулятором величи-ны усилия гибкой связи, установленным на подрессореннои массе и кинематически связанным с гибкой связью на участке между упругим элементом подвески и неподрессореннои массой транспортного средства. 2.Подвеска по п. 1, отличающаяся тем, что регулятор величины усилия и преобразователь направления действия гибкой связи выполнены в виде двуплечего рычага с плечами различной длины, расположенными под углом друг к другу, причем ось двуплечего рычага кинематически связана с подрессоренной массой транспортного средства. 3.Подвеска по п. I, отличающаяся тем, что регулятор величины усилия и преобразователь направления действия гибкой связи выполнены в виде профилированного эксцентричного ролика, ось которого кинематически связана с подрессоренной массой транспортного средства. 4.Подвеска по п. 1, отличающаяся тем, что, с целью изменения характеристики подвески в процессе эксплуатации в зависимости от условий движения, плечи гибкой связи исполнены регулируемыми по длине. Источники информации, принятые во внимание при экспертизе 1.Калисский В. С. и др.- Автомобиль. М., «Транспорт, 1970, с. 20, рис. 157. 2.Авторское свидетельство СССР № 795986, кл. В 60 G П/00, 27.04.78. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвеска транспортного средства | 1978 |
|
SU795986A1 |
| Рычажная балансирная подвеска последовательно расположенных осей колес транспортного средства | 1981 |
|
SU1655819A1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| Гидроэластомерное упругодемпфирующее устройство системы подрессоривания транспортного средства | 2021 |
|
RU2767801C1 |
| Зависимая эластичная подвеска оси транспортного средства | 1982 |
|
SU1519930A1 |
| Шасси транспортного средства | 1978 |
|
SU948743A2 |
| Торсионная подвеска транспортного средства | 1979 |
|
SU870205A1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765584C1 |
| Система управления активной подвеской транспортного средства | 1990 |
|
SU1789358A1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765514C1 |