(54) МЕХАНИЗИРОВАННЫЙ МНОГОЯРУСНЫЙ СТЕЛЛАЖ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный многоярусный стеллаж | 1976 |
|
SU695901A1 |
| Механизированный многоярусный стеллаж | 1982 |
|
SU1024392A1 |
| Механизированный стеллаж | 1982 |
|
SU1031852A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Механизированный многоярусный накопитель | 1988 |
|
SU1699866A1 |
| МЕХАНИЗИРОВАННЫЙ МНОГОЯРУСНЫЙ НАКОПИТЕЛЬ | 1990 |
|
RU2029710C1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Многоярусный механизированный стеллаж | 1987 |
|
SU1491769A1 |
| Механизированный стеллаж | 1986 |
|
SU1382766A1 |
| ТОРГОВЫЙ АВТОМАТ И УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ТОВАРОВ ДЛЯ ИСПОЛЬЗОВАНИЯ В НЕМ | 2015 |
|
RU2583773C1 |
1
Изобретение относится к складскому хозяйству, в частности к механизированным стеллажам для хранения штучных грузов.
Известен многоярусный стеллаж, содержащий корпус с несущими кронштейнами, на которых установлены съемные грузонесущие полки, подъемно-опускные каретки, связанные с цепным приводом 1.
Известен многоярусный стеллаж, содержащий корпус с несущими кронштейнами, на которых установлены съемные грузонесущие полки, подъемно-опускные каретки, связанные с цепным приводом и снабженные выдвижнь1ми захватами, взаимодействующими с боковыми сторонами полок, а так-же механизм выбора полок 2.
Однако известные стеллажи обладают сложной конструкцией за счет связи механизма выбора со сложными электросхемами управления и поэтому недостаточно надежны.
Целью настоящего изобретения является упрощение конструкции и повышение надежности работы.
Это достигается тем, что механизм выбора полок содержит кулачки-упоры, размещенные в корпусе против каждого яруса, поворотный рычаг, закрепленный на каждой подъемно-опускной каретке, взаимодействующий с кулачком-упором соответствующего яруса, и фиксатор выдвижения захвата, закрепленный также на каждой подъемноопускной каретке, причем фиксатор жестко связан с упомянутым рычагом. При этом к лачки-упоры закреплены на вертикальных стержнях, установленных в корпусе против каждой каретки, и расположены по винтовой линии, а корпус стеллажа снабжен адресной шкалой, связанной с упомянутыми стержнями для выдвижения кулачка-упора заданного яруса.
Для надежной фиксации вертикальных
стержней в корпусе установлен замок, образованный верхней частью одного из стержней, выполненной в виде многогранника и закрепленной на корпусе пластиной, один конец которой снабжен подпружиненным щтоком, а на другом конце выполнено отверстие, взаимодействующее с упомянутым многогранником.
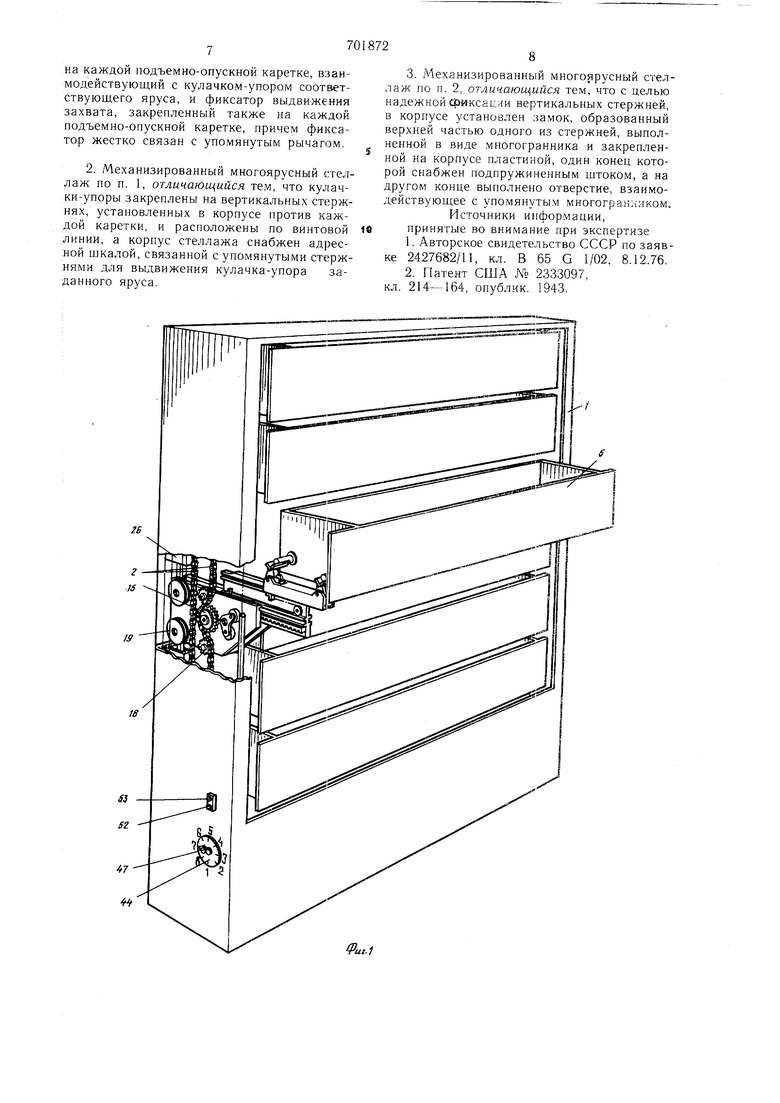
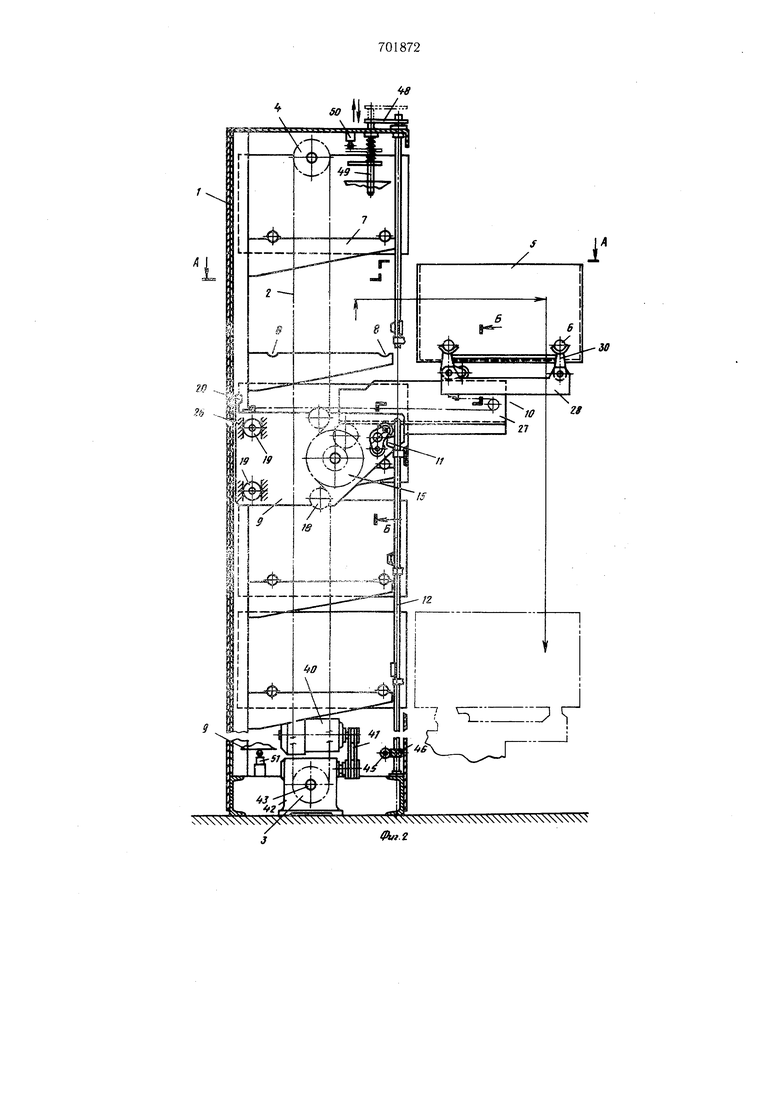
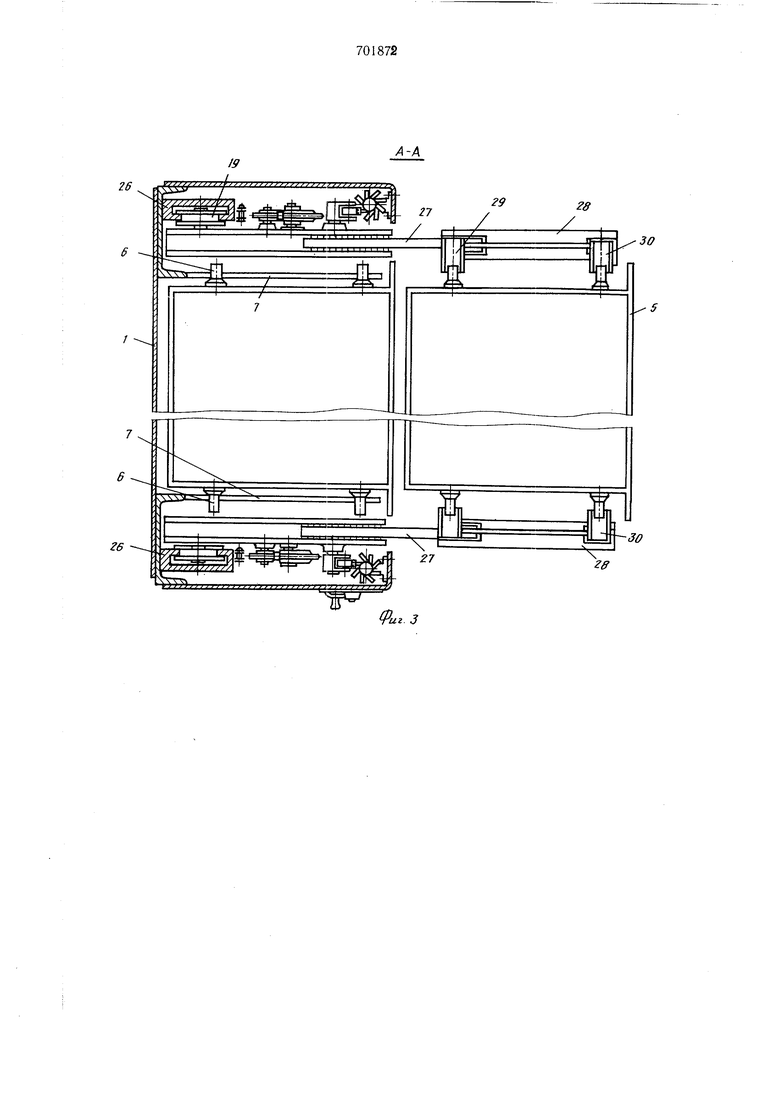
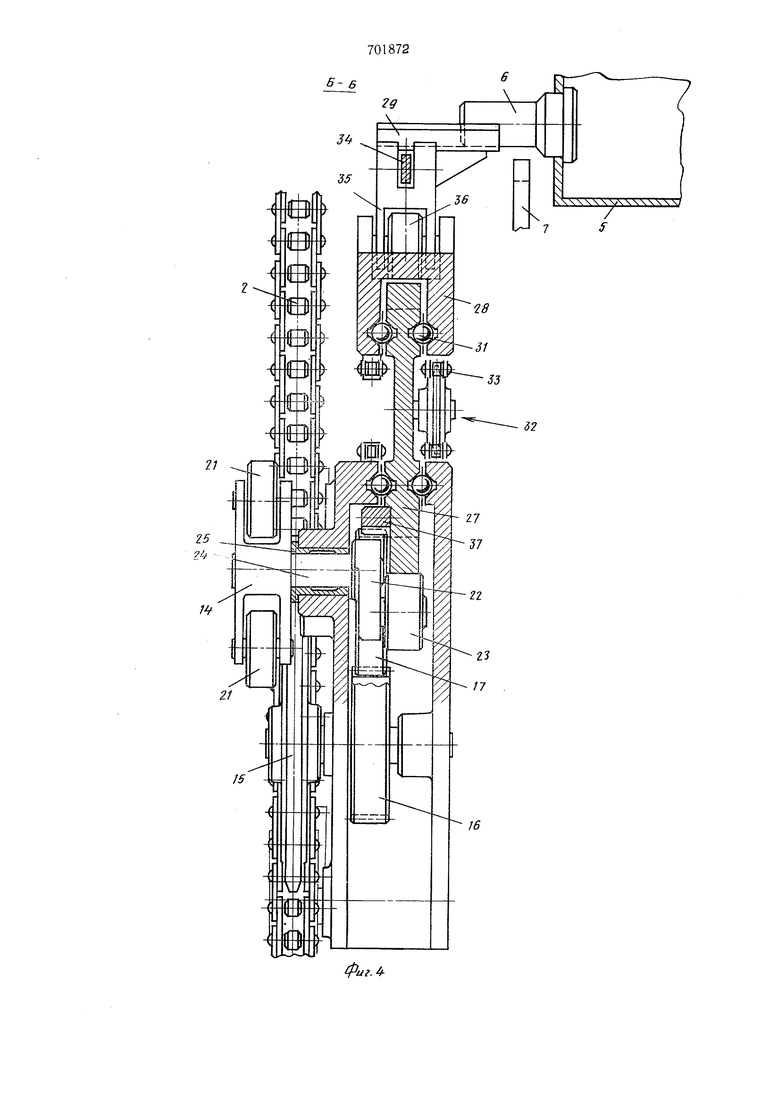
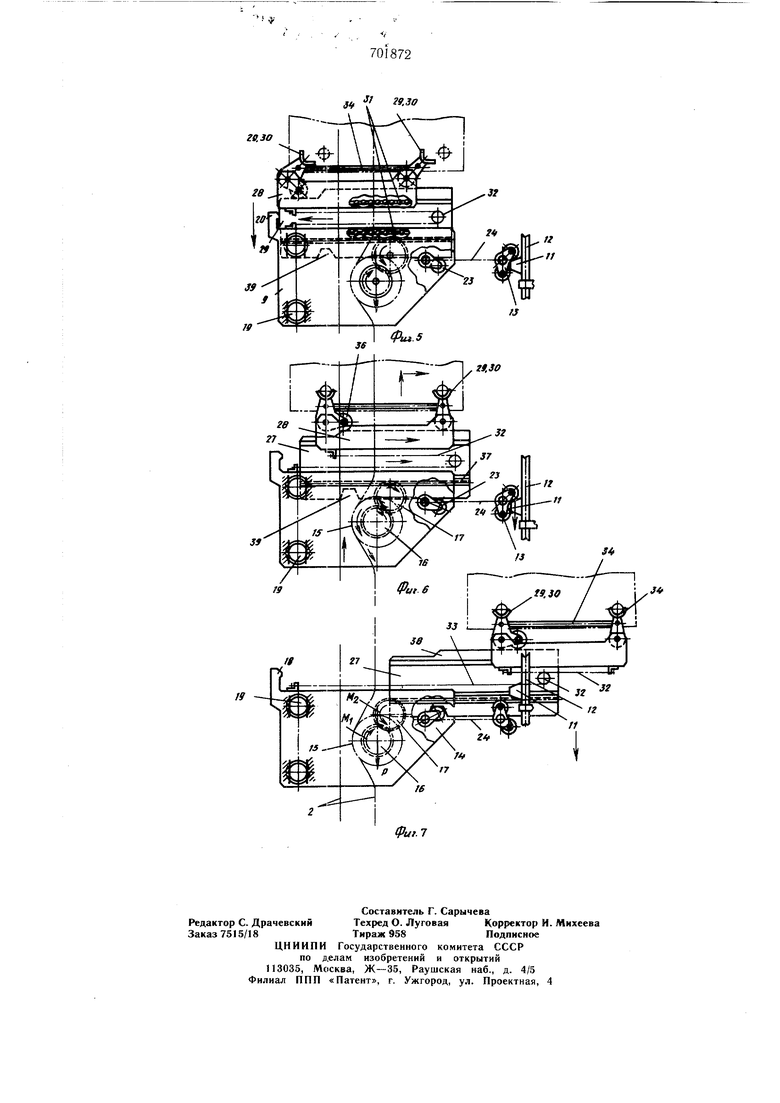
На фиг. 1 изображен общий вид механизированного стеллажа; на фиг. 2-вид механизированного стеллажа с торцовой сто-роны со снятой торцовой стенкой: HS фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - выдвижной за.хват и подъемная каретка в момент остановки движения по вертикали; на фиг. 6 - захват и подъемная каретка в начала движения по горизонтали выдвижного захвата и подъема грузонесущей полки; на фиг. 7 - захват и подъе.мная каретка я момент максимального выдвижения грузонесущей полки по горизонтали и начала движения вниз. Механизированный стеллаж содержит корпус 1, в котором размещены вертикальные цепи 2, огибающие приводные 3 и холостые 4 звездочки, и съемные грузонесущие полки 5. Грузонесущие полки 5 имеют цапфы 6, с помощью которых полка устанавливается на кронштейны 7, жестко закреплеинь-е на корпусе I. На кронштейнах 7 имеются углубления 8, в которые входят цапфы 6 грузонесущих полок 5, чем обеспечивается их фиксация от самопроизвольного смещения. Внутри корпуса 1 размещены также подъемно-опускные каретки 9, оборудовалные выдвижными захватами 10. Стеллаж снабжен механизмом выбора полок, который содержит кулачки-упоры П, закрепленные на вертикальных стержнях 12, размещенных в корпусе против кареток 9, при этом кулачки упоры 11 расположены на каждом стержне по винтовой линии, поворотный рычаг 13, закрепленный на каждой каретке 9, и фиксатор 14 захвата 10. На каждой каретке 9 установлена дополнительная звездочка 15, шестерня 16, паразитная шестерня 17, отклоняющие звез дочки 18, ролики 19 и упор 20. Рычаг 13 снабжен роликами 21, Фиксатор 14 содержит рычаг 22 и ролик 23. Фиксатор 14 и рычаг 13 жестко связаны между собой валиком 24, установленным на каретке 9 в подшипнике 25. Звездочка 15 и щестерня 16 жестко соединены между собой. Отклоняющие звездочки 18 обеспечивают необходи.мый угол охвата дополнительной звездочки 15 цепью 2. Ролики 19 контактируют с направляющей 26, закрепленной на корпусе 1. Грузозахват содержит среднее звено 27, грузонесущее звено 28 и шарнирные кронштеины 29 и 30. Звенья 27 и 28 подвижно соединены между собой и с кареткой 9 с помощью шариковых опор 31 и палиспа:тов 32, содержащих гибкие элементы 33. Кронштейны 29 и 30 связаны тягой 34. На коонштейне 29 имеется дополнительный рычаг 35 с роликом 36. На среднем звене 27 закреплена зубчатая рейка 37, связанная с вертикальными цепными передачами 2 через паразитную шестерню 17, шестерню 16 и дополнительную зае.здочку 15. Среднее звено 27 в верхней своей части имеет выступ 38, а в нижней части выемку 39 для взаимодействия, соответственно, сроликом 36 шарнирного кронштейна 29 и с роликом 23 фиксатора 14. В корпусе 1 установлен привод, состоящий из электродвигателя 40, клинсоеменной передачи 41, червячного редуктора 42 и вала 43. Вал 43 в средней части соединен с червячным редуктором 42, а на его концах жестко закрег лены приводные звездочки 3. На корпусе 1 закреплена адресная шкала 44, с которой связаны стержни 12 посредством поперечного вала 45 и угловой передачи 46, например .у1но1Ч)заходной винтовой пары. На поперечном валу 45 заксецлена управляющая рукоятка 47, имеющая фиксированные положения на адресной шкале 44, соответствующие ярусам механизировапного стеллажа. Стеллаж снабжен замком, образованным многогранником, выполненным на верхнем конце одного из поворотных вертикальных стержней 12, и пластиной 48 с отверстием,-совпадающим по конфигурации с формой многогранника. Пластина 48 снабжена подгфужинепным щтоком 49, с которым взаимодействует подъемная каретка 9. В верхней и нижней частях корпуса I установлены конечные выключатели 50 и 51,, ограничивающие движение подъемных кареток 9 по высоте. С внешней сторонь, корпуса установлены кнопки 52 - подать Юлку и 53-- вернуть полку на место. Механизированный стеллаж действует следующим образом. Исходным состоянием механизированного стеллажа является всегда верхнее крайнее положение подъемных кареток 9. Конечный выключатель 50 нажат. Новоротом рукоятки 47, с фиксацией ее на адресной шкале 44, задается адрес подачи желаемой грузонесущей нолки 5. При этом происходит установка кулачка-упора II на соответствующем ярусе путем поворота вертикального стержня 12 с помощью угловой передачи 46 и вала 45. Нажимается кнопка 52- ПОДИТЕ полку. Включается электродвигатель 40 и его вращение передается приводным звездочкам 3 через клиноременную передачу 41, червячный редуктор 42 и вал 43, Вертикальные цепи 2 получают движение и связанные с ними подъемные каретки 9 начинают опускаться. Условие связи каждой подъемной каретки 9 с вертикальной цепной цередачей 2 обеспечивается следующий образом. Подъемная каретка 9 под действием собственной силы тяжести Р {фиг, 5) всегда
стремится двигаться вниз относительно цепи 2. Вследствие этого, на шестерне 16 и паразитной шестерне 17 через дополнительную звездочку 15,входяш,ую в зацепление с цепью 2, возникают враш,аюшие моменты М1 и М J. Так как паразитная шестерня 17 связана с рейкой 37, то среднее звено 27 стремится перемещаться по направлению силы РЧ, создаваемой указанными моментами. Перемеш.ению среднего звена 27 в этом направлении препятствует упор 20.
Таким образом, дополнительная звездочка 15 заторможена с помошью упора 20 через рейку 37, паразитную шестерню 17 и шестерню 16.
Этим обеспечивается связь подъемной каретки 9 с цепью 2 и их совместное движение по вертикали.
Опускание подъемной каретки 9 происходит до соприкосновения рычага 13 с кулачком-упором 11, установленным на заданном ярусе. В этот момент подъемная каретка 9 (фиг. 6) останавливается, а цепь 2 продолжает двигаться в том же направлении, вращая дополнительную звездочку 15. Вращение звездочки 15 преобразуется в поступательное движение среднего 27 и грузонесущего 28 звеньев через шестерню 16, паразитную шестерню 17, рейку 37 и палиспаст 32.
В данном случае сила Pi и моменты М, и М 2,отсутствуют, т. к. масса каретки воспринимается кулачком-упором 11 через рычаг 13
Движение в горизонтальном направлеНИИ грузонесущего звена 28 сопровождается подъемом и выдвижением грузонесущей полки 5 за пределы корпуса 1.
Это достигается с помощью шарнирных кронщтейнов 29 и 30, которые в момент совмещения их с цапфами 6 вступают с ними в контакт и начинают приподнимать грузонесущую полку 5 вследствие обкатывания роликом 36 выступа 38 и получения вертикальной траектории движения в точках контакта. Далее ролик 36 движется по прямому участку среднего звена 27 и грузонесущая полка 5 перемещается в поднятом состоянии.
В конце хода среднего звена 27 фиксатор 14 своим роликом 23 входит в выемку 39. В процессе входа ролика 23 в выемку 39 рычаг 13 получает вращательное движение через валик 24 на угол, необходимый для обхода кулачка-упора 11.
В момент обхода рычагом 13 кулачка-упора 11 движение по горизонтали звеньев 27 и 28 прекращается, а подъемная каретка 9 получает движение вниз совместно с движущейся цепью 2.
Снова возникают моменты MI и Мг на шестернях 16 и 17 и сила Р i, которая теперь воспринимается фиксатором 14, препятствующим Перемещению среднего звена 27 по направлению этой силы и удерживающим грузозахватный механизм в выдвинутом положении вместе с грузонесушей полкой 5.
В таком положении подъемная каретка 9 доходит до крайнего нижнего положения, удобного для производства погрузочно-разгрузочных работ, нажимает на конечный выключатель 51 и останавливается, т. к. привод выключается.
Для установки грузонесущей полки 5 на прежнее место нажимается кнопка 53 - вернуть полку на место, включается электродвигатель 40 на реверс и установка полки происходит описанным образом в обратном порядке.
Во время рабочего цикла, заключающегося в движении подъемных кареток 9 от исходного положения до исходного положения, действует механическая блокировка. Механическая блокировка необходима для исключения возможности изменения адреса до завершения рабочего цикла и для обеспечения установки грузонесущей полки 5 только на предназначенное ей место. Блокировка действует следующим образом.
В момент начала рабочего цикла при движении подъемных кареток 9 вниз пластина 48 опускается и своим отверстием находит на многогранник поворотного вертикального стержня 12, тем самым фиксируя его от самопроизвольного или принудительного поворота. При обратном ходе подъемной каретки 9 последняя взаимодействует со штоком 49 и поднимает пластину 48, разъединяя ее с многогранником. В этом случае поворот вертикального стержня возможен.
Привод механизированного стеллажа работает без остановки при перемещении подъемных кареток 9 вниз от конечного выключателя 50 до конечного выключателя 51, а при перемещении кареток вверх - от выключателя 51 до выключателя 50.
Применение данного механизированного стеллажа позволит значительно сократить металлоемкость и трудозатраты на его изготовление за счет простоты конструкции и повысить надежность эксплуатации в связи с отсутствием электрической схемы управления.
Формула изобретения
i.Механизированный многоярусный стеллаж, содержащий корпус с несущими кронштейнами, на которых установлены съемные грузонесущие полки, подъемно-опускные каретки, связанные с цепным приводом и снабженные выдвижными захватами, взаимодействующими с боковыми сторонами полок, а также механизм выбора полок, отличающийся тем что, с целью упрощения конструкции и повышения надежности работы, механизм выбора полок содержит кулачкиупоры, размещенные в корпусе против каждо.го яруса, поворотный рычаг, закрепленный
на каждой подъемно-опускной каретке, взаимодействующий с кулачком-упором соответствующего яруса, и фиксатор выдвижения захвата, закрепленный также на каждой подъемно-опускной каретке, причем фиксатор жестко связан с упомянутым рычагом.
принятые во внимание при экспертизе
26
30
X
г0
(риг 3
ге.зо
31 29.30
tput.J
