Изобретение относится к промышленности транспорта, а именно к устройствам для внутрицеховых перевозок, например в автоматизированных стеллажных складах для перегрузки штучных грузов на месте комплектации.
Целью изобретения является расширение функциональных возможностей устройства.
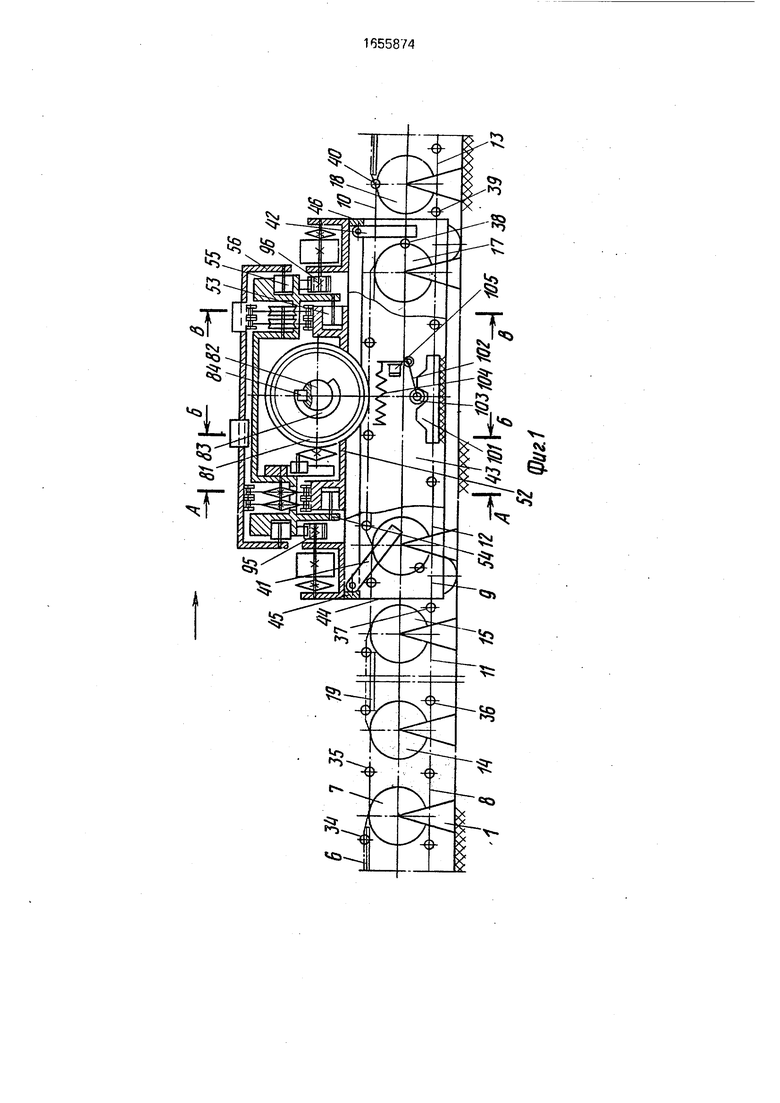
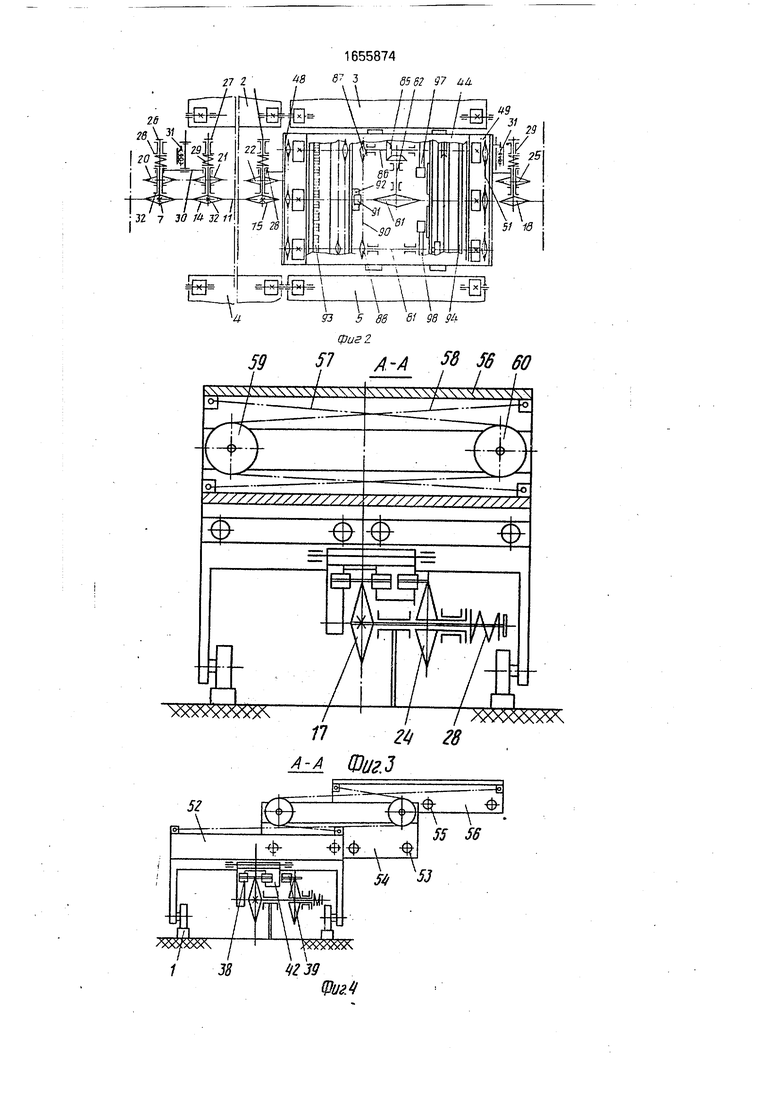
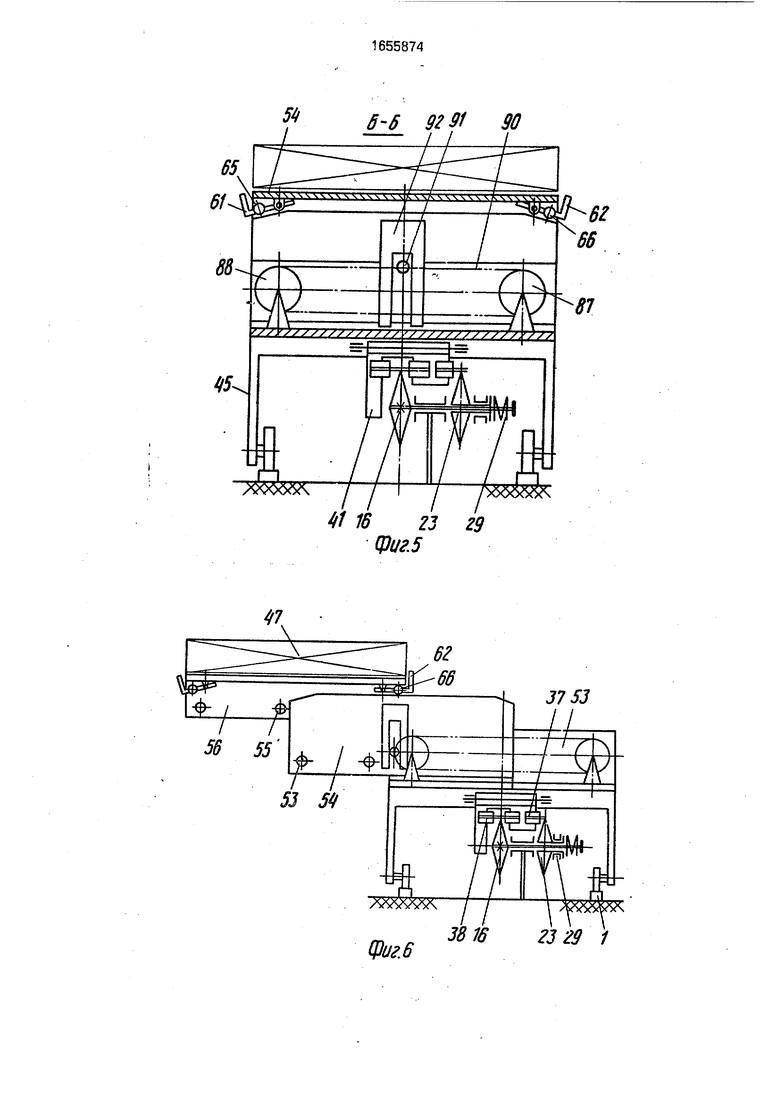
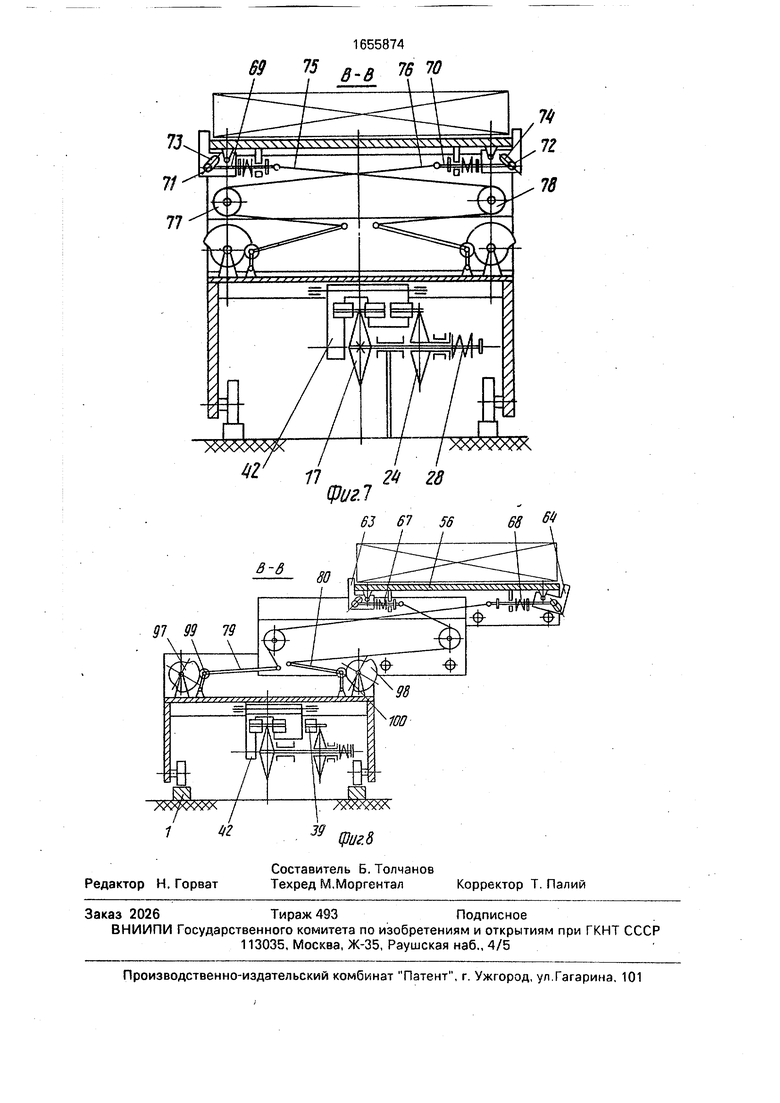
На фиг.1 изображено устройство, вид сбоку; на фиг.2 - то же, вид сверху; на фиг 3 - сечение А-А на фиг.1; на фиг.4 - то же, с выдвинутым сталкивателем; на фиг.5 - сечение Б-Б на фиг.1; на фиг.6 - то же, с выдвинутым сталкивателем; на фиг.7 - сечение В-В на фиг. 1; на фиг.8 - то же. с выдвинутым сталкивателем.
Стрелкой показано направление движения тележки.
Устройство содержит основание 1 с неприводными роликовыми конвейерами 2-5.На основании 1 закреплен реверсивный привод (не показан), соединенный с бесконечным тяговым цепным органом 6, смонтированным на звездочке привода и звездочке 7. Тяговый орган б (фиг.1) с помощью цепных передач 8-10 соединен с бесконечными тяговыми органами 11-13, которые смонтированы соответственно на звездочках 14-18 и звездочке, не показан- ной)закрепленных на основании 1, причем вырхние. ветви тяговых органов 6,11,12 и 13 опираются на направляющие 19, Цепные передачи 8-10 смонтированы соответственно на звездочках (фиг.2) 20 и 21, 22 и 23, 24 и 25. Цепная передача 8 включает звездочки 20 и 21, установленные на валах 26 и 27 звездочек 7 и 14 посредством шпоночных соединений (шпонки не показаны) с возможностью перемещения вдоль продольной оси валов 26, 27, и подпружинены пружинами 28, 29 в сторону звездочек 7 и 14. Звездочки 20 и 21 связаны между собой тягой 30, которая взаимосвязана с тянущим электромагнитом 31, обеспечивающим при включении перемещение звездочек 20 и 21 в сторону пружин 28 и 29, при этом тяга 30 соединена со звездочками 20 и 21 с помощью шарниров 32 и 33. Аналогично передаче 8 выполнены цепные передачи 9 и 10.
На бесконечных тяговых органах 6-13 и цепных передачах 8-10 соответственно закреплены группы толкателей 34-40 (фиг.1), выполненные в виде роликов, закрепленных на цепных органах с одинаковым шагом равномерно по каждому контуру. Толкатели 34-40 закреплены с возможностью взаимодействия с упорами 41 и 42, шарнирно закрепленными на раме 43 тележки 44, при этом упоры 41 и 42 удерживаются в вертикальном положении ограничителями 45 и 46. Толкатели 34, закрепленные на тяговом органе 6, обеспечивают реверсивное движение тележки 44 от приемного роликового конвейера (не показан) к роликовым конвейерам 2 и 4. Толкатели 35 на цепной передаче 8 перемещают тележку с тягового органа 6 на тяговый орган 11. Толкатели 36 на тяговом органе 11 приводят в реверсивное движение тележку 44 около роликовых конвейеров 2 и 4. Толкатели 37 на цепной передаче 9 позволяют передавать гележку 44 стягового органа 11 на тяговый орган 12 и обратно. Толкатели 38 на тяговом органе 12 приводят в реверсивное движение тележку 44 около роликовых конвейеров 3 и 5. Толкатели 39 на цепной передаче 10 позволяют передавать тележку 44 с тягового органа 12 на тяговый орган 13 и обратно. Толкатели 40 на тяговом органе 13 приводят в реверсивное движение тележку 44 по остальной трассе. Для перегрузки груза 47 с тележки 44, например, на неприводные роликовые конвейеры 3 или 5, на раме 43 установлены роликовые дорожки 48 и 49, ролики которых соответственно соединены цепны0 ми контурами 50,51 и телескопический стал- киватель (фиг.1), состоящий из неподвижно закрепленной на раме 43 секции 52, установленной в пазах этой секции с возможностью перемещения на катках 53 средней
5 секции 54 и установленной в пазах средней секции с возможностью перемещения на катках 55 верхней секции 56.
Секции 54 и 56 телескопически связаны между собой пластинчатыми цепями 57 и 58
0 (фиг.З), которые жестко закреплены по краям секции 56 и огибают звездочки 59 и 50, установленные с возможностью свободного вращения по краям секции 54, при этом свободные концы цепей 57 и 58 закреплены
5 на секции 52. Для перемещения грузов по
неприводным роликовым конвейерам 2-5
на секции 56 предусмотрены упоры 61-64.
Упоры 61 и 62 (фиг. 5,6) предназначены
для сталкивания грузов с тележки 44 на кон0 вейеры 2-5. Упоры 61 и 62 шарнирно закреплены на сеции 56 и снабжены катками 65 и 66, которые опираются на секцию 54 и удерживают упоры 61 и 62 в верхнем положении, при котором они выступают над сек5 цией 56. В свободном состоянии упоры 61 и 62 под собственным весом опущены ниже секции 56.
Упоры 63 и 64 (фиг.7,8) предназначены для перегрузки грузов с конвейеров 2-5 на
0 тележку 44. Упоры 63 и 64 шарнирно закреплены на секции 56 и подпружинены пружинами 67, 68 в крайнее верхнее положение, при котором они выступают над секцией 56. Надежное удерживание упоров 63 и 64 в край5 нем верхнем положении и опускание их обеспечивается тягами 69 и 70 с роликами 71 и 72 на концах, которые установлены в наклонных пазах 73, 74, расположенных на упорах 63 и 64. На свободных концах тяг 69
0 и 70 закреплены тросы 75 и 76, которые охватывают блоки 78, 77 на концах секции 54 и соединены с рычагами 79 и 80, шарнирно закрепленными на секции 52. Реверсивное движение телескопического
5 сталкивателя производится посредством дополнительной звездочки 81, взаимосвязанной с приводными тяговыми органами 11, 12, расположенными на позиции перегрузки соответственно около конвейеров 2,4 и 3,5.
Звездочка 81 снабжена шпоночным пазом (фиг. 1), который вместе с валом 82 образуют в поперечном сечении кольцевой секторный паз 83, и вал 82 снабжен шпон- кой 84, ширина которой меньше шпоночного паза на величину, позволяющую свободное вращение звездочки 81 относительно вала 82 при реверсивном движении, например толкателя 38 вокруг звездочки 17. Вал 82 через коническую пару 85 соединен с одним из дополнительных валов 86, на котором закреплена звездочка 87 (фиг.5 и 6). Звездочка 87 и звездочка 88, закрепленная на валу 89, огибаются цепной передачей 90, снабженной толкателем 91 (фиг.5) в виде ролика. Толкатель 91 охватывается вилкой 92, закрепленной на секции 54, которая приводится в возвратно-поступательное движение при вращении звездочки 81.
Передача движения на роликовые дорожки 48 и 49 производится посредством закрепленных на секции 54 реек 93 и 94 (фиг.1 и 2), находящихся в зацеплении с зубчатыми колесами 95 и 96, которые закреплены на центральном ролике каждой дорожки и расположены под рейками, что обеспечивает одинаковое направление движения груза 47 и секций 54 и 56, при этом диаметр роликов должен обеспечивать движение груза 47 по роликовым дорожкам 48 и 49 со скоростью, превышающей скорость движения секции 54 в два раза. Управление толкателями 63 и 64 (фиг.7,8) при перегрузке производится кулачками 97 и 98, закрепленными на валах 86 и 89 при взаимодействии с катками 99, 100, установленными на рычагах 79 и 80. Профиль кулачков позволяет поочередно изменять положение толкателей 63 и 64 при повороте на 180°. С целью исключения самопроизвольного откатывания тележки 44 в местах перегрузки на рамах конвейеров 4 и 5 закреплены держатели 101 (фиг.1) в виде двух треугольных призм, а на раме 43 тележки 44 смонтированы защелки, состоящие из шарнирно закрепленного рычага 102 с роликом 103 на конце, при этом рычаг 102 подпружинен пружиной 104 в сторону упора 105 тележки 44. После остановки тележки 44 на позиции перегрузки ролик 103 взаимодействуете призмами держателя 101 и удерживает тележку от движения.
Валы 82 и 89, звездочка 81, цепная передача 90 с толкателем 91, вилка 92 секции 53-56, упоры 63, 64, кулачки 97, 98, рычаги 79, 80 с катками 99, 100 и рейки 93, 94 являются элементами механизма перегрузки.
Устройство работает следующим образом.
Например, груз 47 необходимо перегруз зить на неприводной роликовый конвейер 5. Включением привода (фиг.2) приводят в движение тяговые цепные органы 6,11,12,13
и цепные передачи 8-10 в направлении стрелки на фиг.1, при этом электромагнит 31, расположенный в зоне звездочек 24 и 25, включен, а звездочки 24, 25 и цепная передача 10 с толкателем 39 смещены в сторону
0 расположенных в этой зоне пружин 28, 29, что исключает возможность взаимодействия толкателей 39 с упорами 42 (фиг. 4 и 8). Под действием толкателя 34 на упор 42 (фис, 1) тележка 44 начинает движение вдоль
5 тягового органа 6. При переходе тележки 44 на цепную передачу 8 одновременно с толкателем 34 на упор 42 воздействует толкатель 35, который продолжает двигать тележку в сторону тягового органа 11, а тол0 катель 34 огибает звездочку 7 и выходит из зацепления с упором 42. При переходе тележки 44 с цепной передачи 8 на тяговый орган 11 одновременно с толкателем 35 на упор 42 воздействует толкатель 36, который
5 продолжает двигать тележку в сторону цепной передачи 9, а толкатель 35 огибает звездочку 14 и выходит из зацепления с упором 42. Переход тележки 44 с тягового органа 11 на тяговый орган 12 происходит аналогич0 ным образом.
При прохождении тележки 44 около конвейеров 3-5 толкатель 38 на тяговом органе 12 огибает звездочку 17, что приводит к замедлению движения тележки, а при край5 нем правом положении толкателя 38 тележка остановится, при этом ролик 103 защелки взаимодействует с призмами держателя 101 и удерживает тележку от движения. При замедлении движения тележки
0 44 начнется вращение звездочки 81 относительно вала 82 за счет зазора между боковыми стенками шпоночного паза 83 и боковыми стенками шпонки 84, при этом вал 82 не вращается . После остановки те5 лежки 44 цепной орган 12 продолжает движение в ту же сторону и вращает звездочку 81, при этом кольцевой секторный паз 83 боковой стенкой взаимодействует с боковой стенкой шпонки 84 и поворачивает вал 82,
0 который через коническую пару 85 (фиг.2) передает вращение на вал 86 со звездочкой 87 и кулачком 97. Звездочка 87 приводит в движение цепную передачу 90 с толкателем 91 (фиг. 5,6), который, взаимодействуя с вил5 кой 92, перемещает секцию 54 в сторону конвейера 5. Движение секции 54 (фиг.З и 4) посредством роликопластинчатых цепей 57 и 58 передается на секцию 56, которая будет двигаться Б ту же сторону с удвоенной скоростью, а через рейки 93 и 94 - на роликовые
дорожки 48,49. Груз 44 будет перемещаться по роликовым дорожкам 48 и 49, при этом толкатель 62 продолжит движение груза по неприводному конвейеру 5, (фиг.6), В правом крайнем положении (фиг.8)толкатель 64 под действием кулачка 97 опустится ниже секции 56 и позволит выйти секции 56 из- под груза до расположения сталкивателя по центру тележки,
Для взятия груза 47, например, с конвейера 5 изменяют направление движения тягового органа 12 и включают электромагнит 31, размещенный в зоне звездочек 21 и 22, при этом толкатели 37 выходят из зацепления с упором 41, а последний занимает вертикальное положение. При движении тягового органа 12 толкатели 38 свободно проходят мимо упора 41 и начинается вращение звездочки 81. После выбора зазора в шпоночном соединении звездочка 81 приводит в движение секции 54 и 56 в сторону конвейера 5. При этом (фиг.8) упор 64 отклоняется под действием кулачка 97 ниже секции 56 и находится в таком положении при повороте кулачка 97 на 180°, что совпадает с перемещением секции 56 до полного выдвижения. Затем кулачок 97 освобождает упор 64 и он под действием пружины 68 занимает вертикальное положение, после чего груз 47 начинает двигаться в сторону роликовых дорожек 48 и 49, а упор 64 перемещает груз с конвейера 5 на роликовые дорожки 48 и 49, которые перемещают груз з направлении движения секции 54 и 56. После перегрузки груза 47 на тележку 44 последняя может транспортировать груз, например к конвейерам 2,4 и производить там перегрузку влюбой последовательности. Выдвинутое положение секции 56 в крайних положениях и нейтральном положении может определяться бесконтактными датчиками, размещенными на позициях перегрузки (не показаны). Сигнал с датчиков используется для управления приводом тяговых органор 6, 11, 12, 13.
Формула изобретения
Устройство для перегрузки грузов на
приемные конвейеры, включающее бесконечный тяговый орган, связанную с ним тележку возвратно-поступательного перемещения, смонтированные на тележке приводные роликовые дорожки и механизм
перегрузки, отличающееся тем, что, что, с целью расширения функциональных возможностей за счет обеспечения передачи грузов как на приводные, так и на неприводные приемные конвейеры,
механизм перегрузки выполнен в виде установленного на тележке вала со шпонкой, расположенной на валу с возможностью взаимодействия с бесконечным тяговым органом звездочки, выполненной с кольцевым
секторным пазом, в котором размещена шпонка, дополнительных валов, перпендикулярно расположенных основному валу и один из которых связан с последним посредством конической пары, цепной передачи, связывающей дополнительные валы и имеющей толкатель, неподвижно установленный на тележке, нижней секции и двух телескопически связанных между собой средней и верхней подвижных секций,
смонтированных на средней подвижной секции вилки, охватывающей толкатель, шарнирно установленных на верхней подвижной секции с боковых ее сторон подпружиненных упоров, смонтированных на
дополнительных валах кулачков, шарнирно установленных на тележке рычагов, связанных с подпружиненными упорами посредст- вом тросов и имеющих катки для взаимодействия с кулачками, и реек, закрепленных на средней подвижной секции и свя- занных с одним из роликов каждой приводной роликовой дорожки посредством смонтированного на оси указанного ролика зубчатого колеса.
Cto
ел


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Устройство для перегрузки изделий | 1988 |
|
SU1579877A1 |
| Устройство для перегрузки изделий | 1986 |
|
SU1395571A1 |
| Агрегат для термообработки стеклоизделий | 1979 |
|
SU872471A1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Устройство для перегрузки изделий | 1988 |
|
SU1654184A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1150198A1 |
| Устройство для перегрузки изделий | 1981 |
|
SU1022919A2 |
Изобретение относится к транспорту и позволяет расширить функциональные возможности устройства. Устройство включает бесконечный тяговый орган 11, связанную с ним тележку (Т) 44 возвратно-поступательного перемещения, смонтированные на Т44 роликовые дорожки (РД) 48, 49 и механизм перегрузки. Последний состоит из установленного на Т 44 вала 82 со шпонкой, из расположенной на валу 82 звездочки 81, выполненной с кольцевым секторным пазом, в котором размещена шпонка. Кроме того, механизм перегрузки состоит из дополнительных валов 86, 89, первый из которых связан с валом 82 конической парой 85, цепной передачи 90, связывающей валы 86, 89 и имеющей толкатель 91, из охватывающей толкатель 91 вилки 92. Кроме того, механизм перегрузки включает подвижно установленную на Т 44 нижнюю секцию и две телескопически связанные между собой среднюю и верхнюю подвижные секции. Вилка 92 установлена на средней секции. Механизм перегрузки включает также шар- нирно установленные на верхней секции с боковых ее сторон подпружиненные упоры, смонтированные на валах 86, 89 кулачки, шарнирно установленные на Т 44 рычаги, связанные с подпружиненными упорами тросами и имеющие катки, обкатываемые по кулачкам. Кроме того, механизм передачи включает рейки 93, 94, закрепленные на средней секции и связанные с одним из роликов РД 48, 49 через установленное на ролике зубчатое колесо. От тягового органа 11 Т 44 перемещается в зону перегрузки и останавливается, при этом звездочка проворачивается на валу 82, передавая движение на подвижные секции и РД 48, 49. Верхняя секция выдвигается и передает груз подпружиненными упорами и РД 48, 49. При обратном движении подпружиненные упоры, расположенные перед грузом, утапливаются и проходят под грузом. 8 ил. (Л С О СЛ сл 00 XI
fr/.8SS9l
1655874
21 148 7 38562 97 ий-- -i bЈ-AV
i--- г
мТТТ
дз 5 SS 51 98 9Ь. фиг 2
51 А-А 58 56
/
/7
А-А фцг.З
М39
/
г
/ лххххетгч
28
#
65
4f 16 23 ф№5
6-6 92 91 90
37 S3
фиг. 6
3816 2329 1
W г8
63 67 56 I I I
В-6
/9999994
39
фиг.8
68 M
| Авторское свидетельство СССР № 759378, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Трехфазный регулятор напряжения | 1961 |
|
SU148824A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
