Предлагаемое изобретение касается трамвайного, контроллера для последовательно-параллельного соединения двух сериесных моторов постоянного тока и имеет целью уменьшить число пальцев главного барабана.
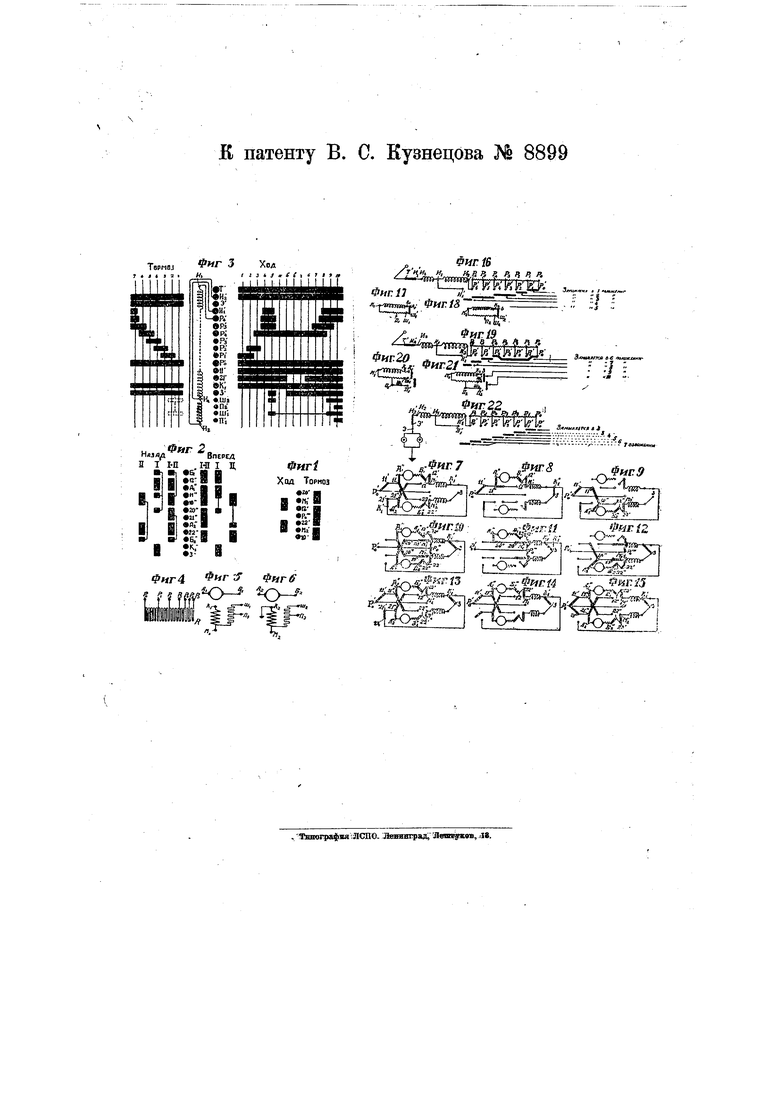
На чертеже фиг. 1 изображает принципиальную схему тормозного барабана контроллера; фиг. 2-принципиальную схему реверсивного барабана контроллера; фиг. 3-принципиальную схему главного барабана контроллера; фиг. 4-схему реостата, служащего для пуска и электродинамического торможения; фиг. 5-схему первого сериесного мотора; фиг. 6-схему второго сериесного мотора; фиг. 7-схему части электрической цепи тяговых моторов при включении контроллера на ход на двух последовательно соединенных моторах; фиг. 8-схему части электрической цепи при включении контроллера на ход на одном первом моторе; фиг. 9-схему части электрической цепи при включении контроллера на ход на одном втором моторе; фиг. 10-схему, части электрической цепи при включении контроллера на торможение двумя параллельно соединенными моторами с перекрещиванием обмоток главных полюсов; фиг. 11-схему части электрической цепи при включении контроллера на торможение одним первым мотором; фиг. 12- схему части электрической цепи при включении контроллера на торможение одним вторым мотором; фиг. 13-схему части электрической цепи при включении главного барабана па второе переходное от последовательного к параллельному соединению положение; фиг. 14- схему части электрической цепи при включении главного барабана на третье переходное от последовательного к параллельному соединению положение; фиг. 15-схему части электрической цепи при включении контроллера на ход на двух параллельно соединенных моторах; фиг, 16 - схему части -Электрической цепи при включении контроллера на ход на одном из моторов пли на двух последовательно соединенных моторах; фиг. 17-схему щуатированной обмотки главных полюсов первого мотора при пятом положении главного барабана, соответствующем последовательпому соединению моторов; фиг. 18-схему шунтированной обмотки главных
полюсов вторэго мотора при пятом положении главного барабана, соответствующем последовательному соединению моторов; фиг. 19- схему части электрической цепи при всех переходных положениях главного барабана и включении контроллера на ход на двух параллельно соединенных моторах; фиг. 20-схему шунтированной обмотки главных полюсов первого мотора при девятом и десятом положении главного барабана, соответствующем параллельному включению моторов; фиг. 21-схему шунтированной обмотки главных полюсов второго мотора при девятом и десятом положении главного барабана, соответствующем параллельному включению моторов; фиг. 22-схему части электрической цепи при включении контроллера на торможение.
Главный барабан предлагаемого контроллера имеет девятнадцать пальцев, расположенных в следующем порядке: палец Т, Щ, Э, И, Ре , Р., Р/, РЗ, Р;, Р/, РО, 11, 21, , 3, Ш,. II,, III,, И,. Палец Т служит для подводки тока от токоприемника и для соединения с пальцем Я при всем включениях контроллера на ход. Пальцы Лз, HI и PS, соединенные с соответственными зажимами Из, Щ и Иг искрогасительной катушки, служат для включения этой катушки в цепь, при чем пальцы и служат также для шунтирования части искрогасительной катушки при четвертом и пятом положениях главного барабана, соответствующих последовательному включению моторов, при восьмом, девятом и десятом положениях главного барабана, соответствующих параллельному включению моторов, и при седьмом положении главного барабана, соответствующем включению моторов на торможение. Палец Ре соединен, кроме того, с зажимом Ре реостата R, остальные зажимы которого PS, Р,, РЗ, РЗ, PI и РО соединены с соответствующами пальцами PS, , Рз, Рз, PI и РО главного барабана, служащими, вместе с пальцем Рб, для введения в цепь и шунтирования отдельных секций реостата при включениях контроллера на ход и торможение. Палец РО служит также для соединения с пальцем 11, при всех положениях контроллера -включенного на ход, и для соединения с пальцем 21 при включении контроллера на ход на двух параллельно соединенных моторах. Пальцы Л и 21соединены с соответствующими пальцами II и /21 реверсивного барабана. Палец 21 при включении контроллера на ход на одном из моторов или на двух соединенных последовательно и при порвых двух переходных положениях главного барабана служит для соединения с пальцем KI соединенным с концом К обмотки главных полюсов первого мотора и служащим для соединения: 1) при пятом положении главного барабана, отвечающем последовательному соединению моторов, с пальцем 2) при девятом положении главного барабана, отвечающем параллельному соединению моторов с пальцами ПГ и /JIi, а при десятом-с пальцами 1Щ, Щ, III, и I/i; 3) наконец, при всех положениях контроллера, включленного на торможение и на ход на двух параллельно соединенных моторах, и при трех последних переходных положениях главного барабана с пальцем з, соединенным с землей. Палец 3 слуяшт также для соединения с пальцем при пятом положении главного барабана, отвечающем последовательному соединению моторов. Пальцы П,, II,, 1П и Г/г, соеденененные с соответствующими зажимами I//i, //i, Ill-i, и 11 сопротивлений, служат для шунтирования этими сопротивлениями обмоток MI, KI и- Жз, главных полюсов обоих моторов. Палец 5, соединенный с землей, служит для соединения с пальцем .йз при включении контроллера на торможение. Согласно вышеприведенному расположению пальцев главного барабана и требуемым соединениям их
между собою, контактные сегменты главного барабана имеют определенные размеры и формы и соответственно соединевы между собой. Контактные сегменты, расположенные против пальцев Т TS. , а также против пальцев РО и II, соединены можду собой и касаются соответственных пальцев при всех положениях контроллера, включенного на ход; то же относится и к контактным сегментам, расположенным притив пальцев Щ и 5, и против пальцев и 3 при всех положениях контроллера, включенного на торможение. Контактный сегмент, расположенный против пальца 21, составлен из двух частей, из коих одна соединена а контактным сегментом, расположенным против пальца , и касается пальца 21 при включении на последовательное соединение моторов и при первых двух переходных положениях, а другая соединена с контрактным сегментом, расположенным против пальца 1Г, и касается пальца 21 при включении на параллельное соединение моторов. Контактный сегмент, расположенный «ротив пальца Я/, касается его при всех положениях контроллера, включенного на ход, также, как и контактный сегмент, расположенный против пальца РО, касается этого пальца при всех положениях контроллера, включенного на торможение. Контактный сегмент, расположенный против пальца 3, составлен из двух частей, из коих одна соединена с контактами сегментом, располоягенным против пальца , и касается пальца 3 при последнем положении, отвечающем последовательному соединению моторов, а другая часть соединена с контактными сегментами, расположенными против пальцев , 1Щ, Щ, П1, и 1/1, и касается пальца 3 при трех последних переходных положениях и при включении на параллельное соединение моторов. Контактные сегменты, расположенные против пальцев 111- и 111 состоят из двух частей и касаются соответствующих пальцев при последнем положении, отвечающем последовательному соединению моторов, и при двух последних положениях, отвечающих параллельному соединению моторов, при чем обе части сегмента, расположенного против пальца /J/i соединены между собою; сегменты, расположенные против пальцев и ZZ/ касаются этих пальцев лишь при последнем положении, отвечающем параллельному соединению моторов. Контактные сегменты, расположенные против пальцев , РЗ, -Рз. Р.. Д , -Ре, и,, соединены между собой и с контактным сегментом, расположенным против пальца Ро, и касаются, при включении главного барабана -на ход, соответственно пальца Р/-в положениях 1 и 2, пальца положениях 2 и 3, пальца Р/-в положениях от 3 до 8, пальцев PS- в положениях 4, 5, 7, 8 и 9, и пальцев PS и положениях 4, 5, 8, 9 и 10, а при включении главного барабана а торможение- пальца Р/-в положениях 2 и 3, пальца положениях 3 и 4, пальца РЗ-в положениях 4 и 5, пальца PI-в положениях б и 6, пальца изложениях 6 и 7, и пальцев и Щ-в положении 7.
Реверсивный барабан имеет двенадцать пальцев. Палец 1Г служит при работе на обоих моторах и на одном первом моторе для соединения с одним из пальцев А, Ь, соединенных с якорными клеммами AI, Б первого мотора, и при работе на одном втором моторе-с одним из пальцев А, J,, соединенных с якорными клеммами А, EZ второго мотора. Палец 21 служит для соединения при работе на обоих моторах с одним из пальцев з, Палец Jii служит при работе на одном первом моторе для соединения с пальцем S, соединенным с землей. 12, соединенный с пальцем 12 тормозного барабана, служит для соединения при работе
на двух моторах и на одном первом моторе с одним из пальцев А, Д. Палец 20 соединенный с пальц м 20 тормозного барабана, служит для соединения при работе на обоих моторах с одним из пальцев Б 2, AZ, а при работе на одном первом моторе-с одним из нальев Б,, AI. Палец 22, соединенный с пальцем 22 тормозного барабана, служит для соединения при работе на двух моторах и на одном втором моторе с одним из пальцев БЗ, А,
Тормозной барабан имеет семь пальцев. Палец 20 служит при включении контроллера на торможение для соединения с нальцем MI, соедиЁенным с нач:алом Jfj обмотки главных полюсов первого мотора. Палец 12 служит для соединения при включении контроллера на торможение с пальцем Д , соединенным с концом Р реостата R, а при включении контроллера на ход-с пальцем Ж/. Палец 22 служит при включении контроллера на торможение для соединения с пальцем РО, а при включении контроллера на ход-с пальцеи соединенным с началом обмотки главных полюсов второго мотора. Палец 10 служит для содинения при включении контроллера на торможение с пальцем MZ.
Главный барабан служит для выполнения последовательного и параллельного соединения моторов, для перехода от последовательного к паралельному соединению моторов, для шутнирования обмоток главных полюсов моторов, для шунтирования секций реостата R и части искрогасительной катушки и для приключения цепи моторов к токоприемнику.
Тормозной барабан служит для включения обмоток главных полюсов в электрическую цепь тяговых моторов, для перекрещивания обмоток главных полюсов при торможении, для параллельного включения моторов и одновременно переключения якорных зажимов моторов при торможении.
Реверсивный барабан служит для включения в электрическую цепь обоих моторов вместе и каждого из них в отдельности и для переключения якорных зажимов мотором при ходе назад.
Для поворота реверсивного барабана контроллер снабжен специальной рукояткой, могуш;ей занимать три положения при ходе вперед и три положения - при ходе назад, при чем реверсивный барабан так сблокирован с главным барабаном, что при работе на одном из моторов главный барабан может занимать лишь те положения, соответствующие работе на двух последовательно соединенных моторах, при которых введена в цепь, по крайней мере, одна секция реостата R. а при выключенном реверсивном барабане поворот главного барабана невозможен.
Для поворота тормозного барабана служит ходовая рукоятка, поворачивающая главный барабан, при чем тормозной барабан так сблокирован с главным, что при включении контроллера на ход, он занимает положение, соответствующее ходу, а при включении контроллера на тормоя ение - соответствуюп1;ее тормржению.
При включении контроллера на ход на двух последовательно или параллельно соединенных моторах, тормозной барабан занимает левое полоя ение, обозначенное на фиг. 1 словом реверсивный барабан занимает первое правое положение, обозначенное на фиг. 2 словом .вперед и цифрами I -f 2; главный барабан занимает одно из правых положений, обозначенных на фиг. 3 словом „ход.
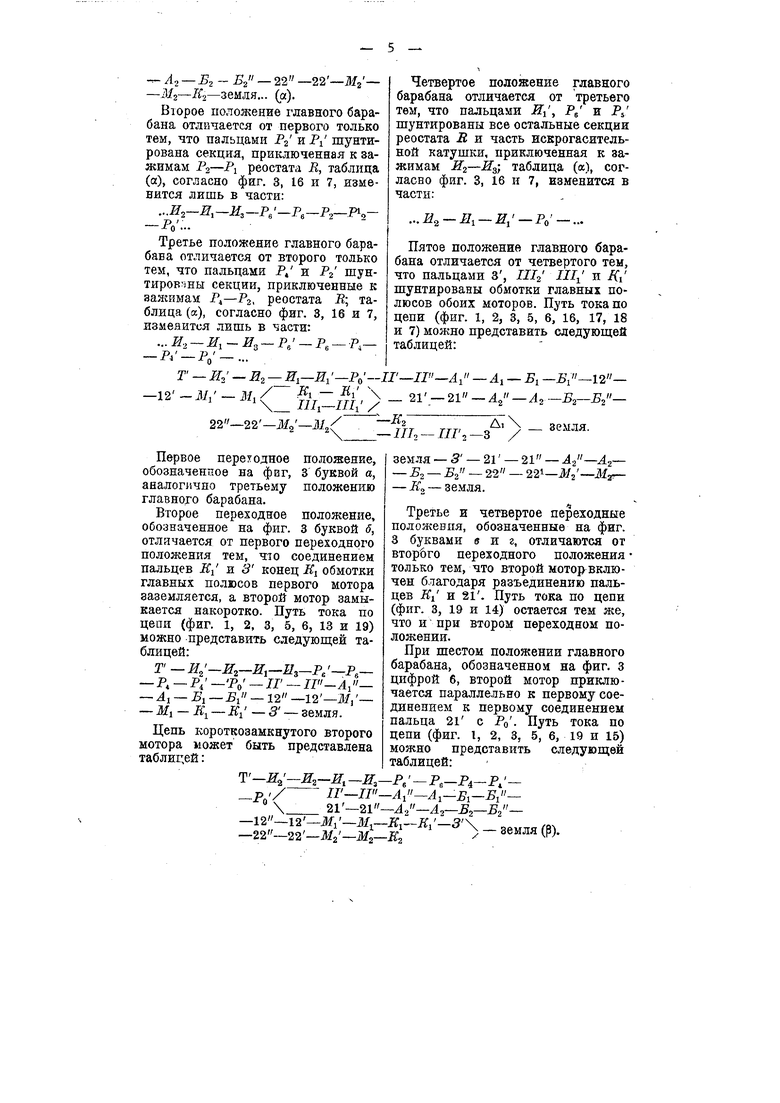
При первом положении главного барабана, обозначенном на фиг. з цифрой 1, путь тока по цепи (фиг. 1, 2, 3, 5, 6, 7 и 16) можно представить следующей таблицей:
, -И,-И,-И,-Р,-Р,-PI -- Р/ - РО - II - j j Б/-12 -12-Ж1-
-М - Б - 21-21 - а - - /j.2 - Д - - 22 -22-Мг--Жз-Яг-земля... (а). Второе положение главного барабана отличается от первого только тем, что пальцами РЗ и Р/ шунтирована секция, приключенная к зажимам Р.-PI реостата R, таблица (а), согласно фиг. 3, 16 и 7, изменится лишь в части: ...//2-Д--г/з-Рв-Рб-Р-Р оР- -t о третье положение главного барабана отличается от второго только тем, что пальцами Р, и шунтировшы секции, приключенные к важимам , реостата Е таблица (а), согласно фиг. 3, 16 и 7, изменится лишь в части: ... И,,-Р,-Р,Р р -t 1-I и... т - щ - и --и,-и, -12 ж/ - MI / - , - Л-/Я/ X 22 -22-Жо-Ж,/ Первое переходное положение, обозначенное на фвг, 3 буквой а, аналогично третьему положению главного барабана. Второе переходное положение, обозначенное на фиг. 3 буквой 6, отличается от первого переходного положения тем, что соединением пальцев К и 3 конец KI обмотки главных полюсов первого мотора заземляется, а второй мотор замыкается накоротко. Путь тока по цепи (фиг. 1, 2, 3, 5, 6, 13 и 19) можно представить следуюш;ей таблицей:Т ,И,-Р,-Р,, - Р -Ро П - AI Б --Bi - 12 -l2-Mt - Mi - E - -8 земля. Цепь короткозамкнутого второго мотора может быть представлена таблицей: ,-Щ П-П 21-21 -12 -12-Ж/-Ж,-22 -22-Жг-Жг-Четвертое положение главного барабана отличается от третьего тем, что пальцами J2i, PS и шунтированы все остальные секции реостата П и часть искрогасительной катушки, приключенная к зажимам HZ-H, таблица (а), согласно фиг. 3, 16 и 7, изменится в части: ...,-И,-Р,-... Пятое положение главного барабана отличается от четвертого тем, что пальцами 3, Ш Ш и Я/ шунтированы обмотки главных полюсов обоих моторов. Путь тока по цепи (фиг. 1, 2, 3, 5, 6, 16, 17, 18 и 7) можно представить следующей таблицей: -1Р-А,-AI - SI 21 - 21 - 4. - Л, -Б,-Б,- 2 земля. 1/7, -ЛР,-3 земля - 5 - 21 - 21 - -БЗ - БЗ - 22 - 221-Жз-Жзг-Б - земля. Третье и четвертое переходные положения, обозначенные на фиг. 3 буквами виг, отличаются от вторбго переходного положения только тем, что второй мотор включен благодаря разъединению пальцев KI и 21. Путь тока по цепи (фиг. 3, 19 и 14) остается тем же, что и при втором переходном положении. При шестом положении главного барабана, обозначенном на фиг. 3 цифрой 6, второй мотор приключается параллельно к первому соединением к первому соединением пальца 21 с РО. Путь тока по цепи (фиг. I, 2, 3, 5, 6, 19 и 15) можно представить следующей таблицей: -Д-Р.-Р4-Р/-А,А,-Б,-Б,Jo -Лз-БЗ-БЗ - Ki-MI -3 земля (р).
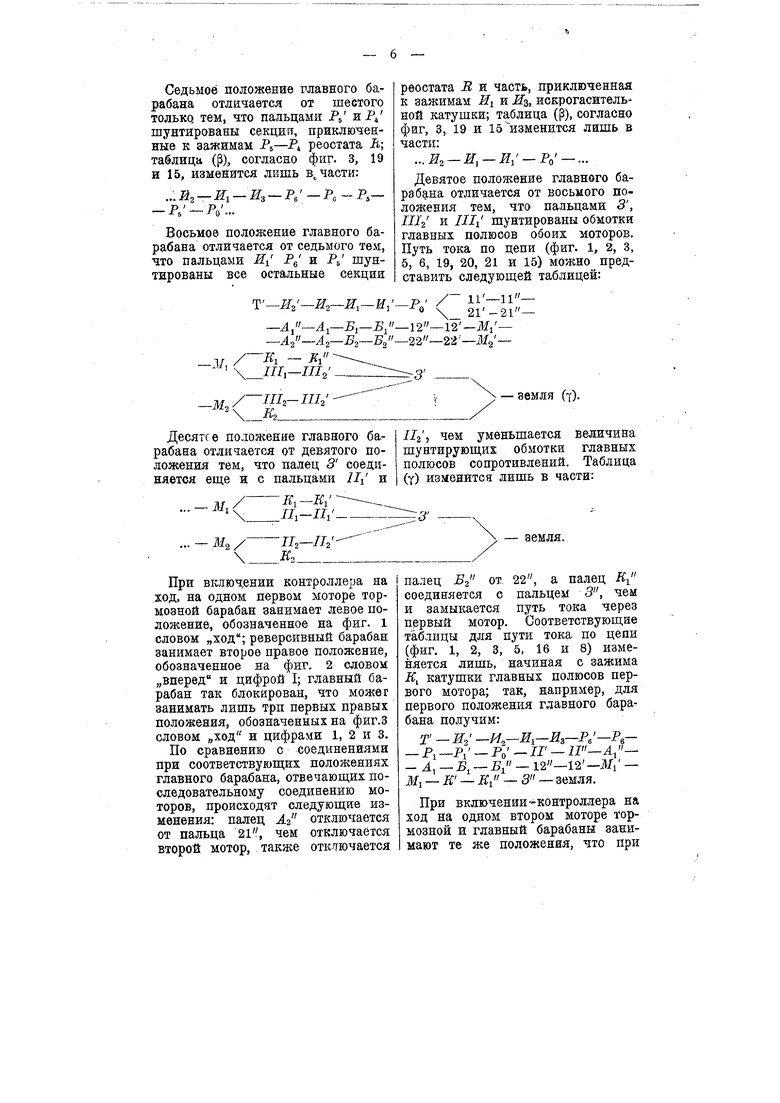
Седьмое положение главного барабана отличается от шестого только тем, что пальцами PS иР/ шунтированы секции, приключенные к зажимам PS-Pj реостата li; таблица (р), согласно фиг. з, 19 и 15, изменится лишь в части:
.;.и,-И,-И,-Р,-Р, - Р, р р
-TS ...
Восьмое положение главного барабана отличается от седьмого тем, что пальцами и шунтированы все остальные секции
Т--И,--И,И,-И,.
-4,-4i-Б,-Ь -12 -12-Jfi-
Е, - К,
-J/, 1Щ-1Щ
,
Ж,
Десятсе положение главного барабана отличается от девятого положения тем, что палец 3 соединяется еще и с пальцами /// и
реостата И и часть, приключенная к зажимам И и Щ, искрогасительной катушки; таблица (р), согласно фиг, 3, 19 и 15 изменится лишь в части: ... -if,-Л/-РО-...
Девятое положение главного барабана отличается от восьмого положения тем, что пальцами 3, niz и nil шунтированы обмотки главных полюсов обоих моторов. Путь тока по цепи (фиг. 1, 2, 3, 5, 6, 19, 20, 21 и 15) можно представить следующей таблицей:
11-и - 21-21 -
22 22-3/2-
- земля (т).
Лз, чем уменьшается величина шунтируюш,их обмотки главных полюсов сопротивлений. Таблица (у) изменится лишь в части:

| название | год | авторы | номер документа |
|---|---|---|---|
| Трамвайный контролер | 1925 |
|
SU8822A1 |
| Искрогасительная катушка для трамвайного контроллера | 1927 |
|
SU15637A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМПАУНДНЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 1935 |
|
SU46970A1 |
| Групповой электропневматический контактор | 1933 |
|
SU43593A1 |
| Винт для регулирования силы нажатия контактного пальца на контактный сегмент контроллера | 1929 |
|
SU22732A1 |
| Контактный палец для контроллеров | 1928 |
|
SU16778A1 |
| Устройство для автоматического буквопечатающего телеграфирования | 1929 |
|
SU32549A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМИ ДВИГАТЕЛЯМИ | 1932 |
|
SU36619A1 |
| Устройство для пуска асинхронных двигателей | 1926 |
|
SU5845A1 |
| Автоматический манипулятор для радиотелеграфных станций | 1916 |
|
SU15565A1 |
При включ ении контроллера на ход, на одном первом моторе тормозной барабан занимает левое положение, обозначенное на фиг. 1 словом реверсивный барабан занимает второе правое положение, обозначенное на фиг. 2 словом „вперед и цифрой I; главный барабан так блокирован, что можег занимать лишь три первых правых положения, обозначенных на фиг.З словом „ход и цифрами 1, 2 и 3.
По сравнению с соединениями при соответствук п ;их положениях главного барабана, отвечаюш,их последовательному соединению моторов, происходят следуюш;ие изменения: палец Аг отключается от пальца 21, чем отключается второй мотор, также отключается
палец БЗ от 22, а палец К соединяется с пальцем 3, чем и замыкается путь тока через первый мотор. Соответствуюш;ие таблицы для пути тока по цепи (фиг. 1, 2, 3, 5, 16 и 8) изменяется лишь, начиная с зажима K катушки главных полюсов первого мотора; так, например, для первого положения главного барабана получим:
Т -Щ я,-Ifi-Лз-Ре-Рб р р/ - Pi IT IP-A,- - , - Б - 12 -12-1/1 - Jfi Е KI - 3 - земля.
При включении-контроллера на ход на одном втором моторе тормозной и главный барабаны занимают те же положения, что при
включении на ход на одном перром моторе, а реверсивный бара(Зан - третье правое поло кеБие, обозначенное на фиг. 2 словом „вперед и цифрой II. По сравнению с соединениями нри соответствующих положениях главного барабана, отвечающих последовательному соединению моторов, происходят следующие изменения: палец AI отключается от пальца II, чем выключается первый мотор, палец EI отключается от пальца 12, палец А отключается от пальца 21 и соединяется с пальцем П, чем и включается второй мотор. Соответствующие таблицы для пути тока по цепи (фиг. 1, 2, 3, 6, 16 и 9) изменятся лишь, начиная с пальца II и кончая пальцем так, например, для первого положения главного барабана получим:
.-И,-И,-И,-Р,-Р, - Р, - PI - РО Л - -А - Б - Б, - 22 -22-J/,MZ - -Ка - земля.
При включении контроллера на ход назад тормозной и главный .барабаны занимают те же положения, что и при аналогичном ходе вперед, а реверсивный барабан-1) при ходе назад на двух моторах занимает первое левое положение, обозначенное на фиг. 2 словом „назад и цифрами 1 + П, 2) при ходе назад на одном первом моторе- второе левое положение, обозначенное на фиг. 2 словом „назад и цифрой I, и, наконец, 3) при ходе назад на одном втором моторе - третье левое положение, обозначенное на фиг. 2
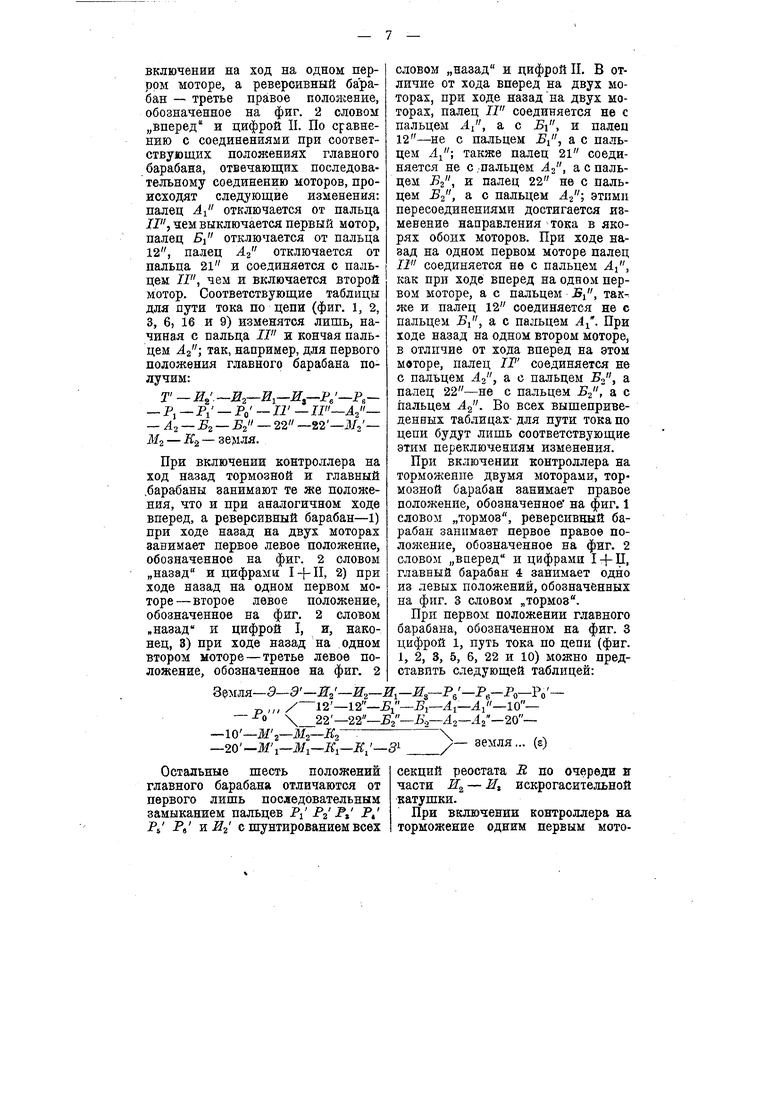
емля-5-Э- з-Ifj-Ifi- 3- б--Рб--Ро-РО-
/-l2-i2 - /-J3,-4i-4i -10 22-22 -БЗ --Ва- 2-.
0 22-22 -БЗ --Ва- 2-.42 -М 2-Жз--йСз 1020-И .-З
Остальные шесть положений главного барабана отличаются от первого лишь последовательным замыканием пальцев Р/ РЗД PS Р, иЛг с шунтированием всех
словом „назад и цифрой П. В отличие от хода вперед на двух моторах, при ходе назад на двух моторах, палец П соединяется не с пальцем А, а с 5i, и палец с пальцем i, а с пальцем 4/; также палец 21 соединяется не с .пальцем А, а с пальцем J52, к палец 22 не с пальцем БЗ, а с пальцем А.; этими пересоединениями достигается изменение направления тока в якорях обоих моторов. При ходе назад на одном первом моторе палец П соединяется не с пальцем AI, как при ходе вперед на одном первом моторе, а с пальцем Si, &кже и палец 12 соединяется не с пальцем , а с пальцем А. При ходе назад на одном втором моторе, в отлпчие от хода вперед на этом мвторе, палец 1Г соединяется не с пальцем Лз, а с пальцем Б,, а цалец с пальцем Б, а с пальцем А. Во всех вышеприведенных таблицах- для пути тока по цепи будут лишь соответствующие этим переключениям изменения.
При включении контроллера на торможение двумя моторами, тормозной барабан занимает правое положение, обозначенное на фиг. 1 словом „тормоз, реверсивный барабан занимает первое правое полоягение, обозначенное на фнг. 2 словом „вперед и цифрами 1 + П, главный барабан 4 занимает одно из левых положений, обозначенных на фиг. 3 словом „тормоз.
При первом положении главного барабана, обозначенном на фиг. 3 цифрой 1, путь тока по цепи (фиг. 1, 2, 3, 5, 6, 22 и 10) можно представить следующей таблицей:
(3)
земля,
/
секций реостата R по очереди г части 2 - if, искрогасительной катушки.
При включении контроллера на торможение одним первым мотором, тормозной барабан занимает правое цоложение, обозначенное на фиг. 1 словом „тормоз, реверсивный барабан занимает второе правое положение, обозначенное на фиг. 2 словом „вперед и цифрой I. По сравнению с соединениями при соответствующих положениях главного барабана, отвечающих торможению двумя моторами, происходят следующие изменения: палец -Bj отключается от 22, чем
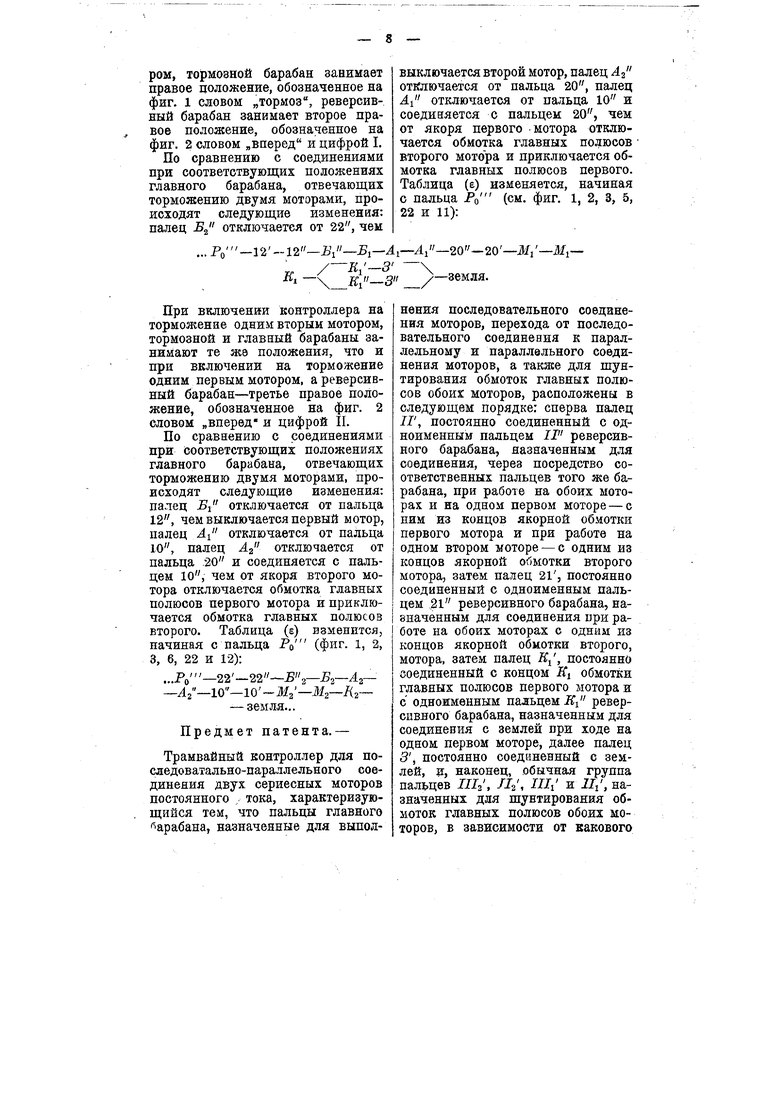
...РО -12-12 -Ъ -Б --4i-4i -20 20-Ж,-Жг
/тг Iо/ ч
К,
При включении контроллера на торможение одним вторым мотором, тормозной и главный барабаны занимают те же положения, что и при включении на торможение одним первым мотором, а реверсивный барабан-третье правое положение, обозначенное на фиг. 2 словом „вперед и цифрой II.
По сравнению с соединениями при соответствующих положениях главного барабана, отвечающих торможению двумя моторами, происходят следующие изменения: палец Б отключается от пальца 12, чем выключается первый мотор, палец AI отключается от пальца 10, палец отключается от пальца .20 и соединяется с пальцем 10, чем от якоря второго мотора отключается обмотка главных полюсов первого мотора и приключается обмотка главных полюсов второго. Таблица (е) изменится, начиная с пальца Д (фиг. 1, 2, 3, 6, 22 и 12):
...РО -22-22 --Б з--S, -.42 -10 -Ю-Жз-Жа-Лг- - земля...
Предмет патента. -
Трамвайный контроллер для последоватально-параллельного соединения двух сериесных моторов постоянного тока, характеризующийся тем, что пальцы главного арабана, назначенные для выполвыключается второй мотор, палец А отключается от пальца 20, палец AI отключается от пальца 10 и соединяется с пальцем 20, чем от якоря первого -мотора отключается обмотка главных полюсов второго мотора и приключается обмотка главных полюсов первого. Таблица (е) изменяется, начиная с пальца РО (см. фиг. 1, 2, 3, 5, 22 и 11):
11Qit /-земля.
нения последовательного соединения моторов, перехода от последовательного соединения к параллельному и параллельного соединения моторов, а также для шунтирования обмоток главных полюсов обоих моторов, расположены в следующем порядке: сперва палец 77, постоянно соединенный с одноименным пальцем II реверсивного барабана, назначенным для соединения, через посредство соответственных пальцев того же барабана, при работе на обоих моторах и на одном первом моторе - с ним из концов якорной обмотки первого мотора и при работе на одном втором моторе -с одним из концов якорной обмотки второго мотора, затем палец 21, постоянно соединенный с одноименным пальцем ,21 реверсивного барабана, навначенным для соединения нри работе на обоих моторах с одним из концов якорной обмотки второго, мотора, затем палец Я/, постоянно соединенный с концом Jifj обмотки главных полюсов первого мотора и с одноименным пальцем реверсивного барабана, назначенным для соединения с землей при ходе на одном первом моторе, далее палец 3, постоянно соединенный с землей, и, наконец, обычная группа пальцев 711з, Jl-i , 1Щ и , назначенных для шунтирования обмоток главных полюсов обоих моторов, в зависимости от какового
расположения пальцев главного барабаэа контактным сегментам его приданы такие размеры и формы, чтобы а) контактные сегменты, расположенные против пальцев PQ и 1Г и постоянно соединенные между собой, касались пальцев РО и 1Г при всех положениях контроллера, .включенного на ход, б) контактный сегмент, расположенный против пальца 21, был составлен из двух частей, из коих одна часть должна быть соединена с контактным сегментом, расположенным против пальца , и назначена для соединения с пальцем 21 при включении на последовательное соединение моторов и при первых двух переходных положениях, а другая часть должна быть соединена с контактным сегментом, расположенным против пальца 1Г, и назначена для соединения с пальцем 21 при включении на параллельное соединение обоих моторов, в) контактный сегмент, расноложенный против пальца JT/, касался названного пальца при всех положениях контроллера, включен: --:iX KSif tSKr,SSKixXlf:SS&SS iasSl S;
ного на ход, г) контактный сегмент, расположенный против пальца 3, был составлен из двух частей, из коих одна часть должна быть соединена с контактным сегментом, расположенным против одного из пальцев, служащих для шунтирования главных полюсов второго мотора при последовательном соединении моторов и назначена для соединения с пальцем 3 при соответственном положении контроллера, тогда как другая часть, назначенная для соединения с пальцем 3 на втором, третьем и четвертом переходных положениях и на всех положениях, отвечающ,нх параллельному соединению моторов, должна быть соединена с контактным сегментом, расположенным против пальца -ffi, а также с контактными сегментами, назначенными для шунтирования при последовательном соединении обоих моторов - обмотки главных полюсов первого мотора, и при параллельном соединении моторов - обмоток главных полюсов обоих моторов.
Фиг 3Ход
Лат- 2
, ВПЕРЕД
Т И . М I Ц
Э«& Я И
В «с-и
Ход ТОРМОЗ r-lf 1 Н ш м
В «л, в Ё, г I ар.п1 %-
. Пгj
Б.-В f
к., Фиг 6
II /11
ФиПб
:s.-2, ГШкГЕ ;
0ИГ17
А-твгоиАь Фиг /5 J
.