Широко известны устройства для управления электрическим краном на расстоянии через посредство двух троллейных проводов и земли в качестве обратного провода, с применением установленного на тележке коммутатора, управляемого электромагнитом, включаемым и выключаемым с поста управления. Также известны устройства для дистанционного управления приемниками электрической энергии через посредство электромагнитов, реагирующих на различны значения силы тока в цепи управления, величина которого устанавливается в зависимости от того, какое из ряда сопротивлений на посту управления будет включено в названную цепь. Наконец известно в устройствах для дистанционного приведения в действие коммутаторов применение электромагнитов, устанавливающих свою подвижную систему в различных положениях в зависимости от силы тока в цепи управления.
В предлагаемом устройстве для дистанционного управления электрическими двигателями, преимущественно двигателями электрических кранов, для селективного включения двигателей с поста управления применены описанные системы дистанционного управления, причем, согласно изобретению, для управления каждым из двигателей тележки применен на посту управления отдельный контроллер с особой системой контактов.
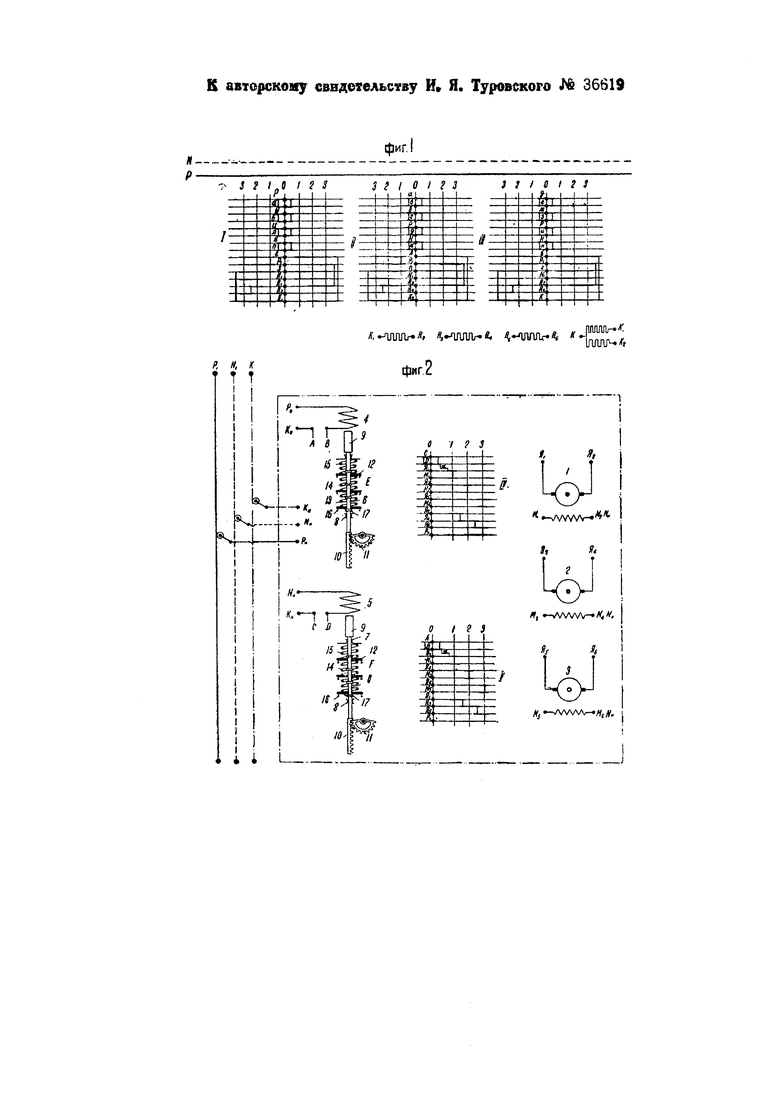
На чертеже фиг. 1 изображает сеть питания, развернутые схемы упомянутых контроллеров и примененные в устройстве электрические сопротивления, т.е. ту часть устройства, которая установлена на посту управления; фиг. 2 схематически изображает троллейную линию и ту часть устройства, которая установлена на тележке. Для ясности чертежа электрические соединения между отдельными элементами, составляющими предлагаемое устройство, на схеме не нанесены, но зато все зажимы, соединенные между собой электрически, обозначены одинаковыми буквами. С целью упрощения и конкретизации описание и чертежи составлены для наиболее распространенного случая, именно - для крана с тремя двигателями.
Стационарные контроллеры I, II, III и электрические сопротивления R1-R2, R3-R4, R5-R6 и K-K1-K2 служат для дистанционного управления соответствующими двигателями 1, 2 и 3, служащими, например, для движения моста, перемещения тележки и подъема и спуска груза, через посредство трехпроводной троллейной линии.
Установленные на тележке электромагнитные приводные механизмы Е и F служат для поворачивания валиков контроллеров IV и, соответственно, V в то или иное из четырех положений. Механическая часть этих механизмов состоит из штанги 6, скользящей в направляющих 7 и 8. Один ее конец переходит в сердечник 9 электромагнитной катушки (соленоида) 4 или 5, другой - в зубчатую рейку 10. Последняя находится в зацеплении с зубчатым сегментом 11, закрепленным на оси соответствующего валика контроллера IV или V. На штангу 6 свободно надеты шайбы 12, между которыми помещены пружины 13, 14 и 15. Самая сильная из них - пружина 15, затем 14 и самая слабая 13. При помощи упоров 16 каждая из этих пружин устанавливается при сборке в частично сжатом состоянии. Сила этого первоначального сжатия берется такой, чтобы она была большей силы, необходимой для полного рабочего сжатия соседней более слабой пружины. Величину рабочего сжатия пружин 13, 14 и 15 ограничивают упорные кольца 17, неподвижно насаженные на штангу 6.
Подводя к соленоидам 4 или 5 то или иное напряжение, можно достигнуть следующих четырех фиксированных положений штанги 6, а следовательно, и связанных с ней валиков контроллеров IV и V:
1. - Нулевое положение: соленоид выключен; штанга 6 находится в нижнем нерабочем положении. 2. - Первое рабочее положение: к соленоиду подведено напряжение через сопротивление K-K1; при этом сердечник 9 втягивается в соленоид, штанга 6 идет вверх, нижнее упорное кольцо 17 увлекает в своем движении нижнюю шайбу 12 и сжимает пружину 13 до тех пор, пока второе снизу упорное кольцо 17 не упрется в шайбу 12, сжимающую пружину 14; выше штанга 6 не пойдет, так как сопротивление K-K1 берется таким, чтобы сила, втягивающая сердечник 9 в соленоид, была больше силы, необходимой для полного рабочего сжатия пружины 13, но меньше силы первоначального сжатия при сборке пружины 14; следовательно, до тех пор, пока подведенное к соленоиду напряжение не будет отключено, штанга 6 будет оставаться в достигнутом положении; это будет второе фиксированное, первое рабочее положение. 3. - Второе рабочее положение: к соленоиду подведено напряжение через сопротивление K-K2; величина этого сопротивления подбирается таким, чтобы соленоид втягивал сердечник 9 с силой, большей силы, необходимой для полного рабочего сжатия пружины 14, но меньшей силы первоначального сжатия при сборке пружины 15; таким же образом, как и в предыдущем случае, штанга 6 достигает сначала первого рабочего положения, но затем, сжимая пружину 14, идет выше; это движение вверх прекратится, когда третье снизу упорное кольцо 17 упрется в шайбу 12, сжимающую пружину 15; теперь получится третье фиксированное, второе рабочее положение. 4. - Третье рабочее положение: к соленоиду подведено полное напряжение сети, он при этом втягивает сердечник 9 с силой, большей силы, необходимой для полного рабочего сжатия пружины 15; штанга 6 идет вверх; последовательно сжимая в своем движении пружины 13, 14 и 15, она остановится, когда четвертое снизу упорное кольцо 17 упрется в крышку направляющей 7; получится четвертое фиксированное, третье рабочее положение штанги 6.
При отключении соленоида от сети штанга 6 из любого рабочего положения, при помощи собственного веса и силы пружин 13, 14 и 15, возвратится в первоначальное нулевое положение.
Сегменты 11, а следовательно, и валики контроллеров IV и V, точно следуют движению штанги 6, поворачиваясь на тот или иной угол.
Проследим теперь работу всего устройства при пуске в ход какого-либо двигателя, например, двигателя 1.
Двигатель 1 управляется при помощи контроллера I.
Допустим, заданному направлению вращения двигателя соответствует левая половина валика контроллера. Тогда при переводе левой половины валика с 0-го на 1-ое положение: 1) размыкаются пальцы Р и а, N и b, и и л и н и п, т.е. от контроллеров II и III отсоединяются провода Р и N сети; 2) замыкаются пальцы е и PI, т.е. главный троллейный провод PI соединяется с проводом Р сети; 3) замыкаются пальцы з и K1, т.е. вспомогательный троллейный провод K соединяется через сопротивление K-K1 с проводом N сети. Соленоид 4, зажимы которого приключены к токоприемникам PII и KII, возбуждается током. Согласно вышеизложенному валик контроллера IV повернется на первое рабочее положение. При этом 1) размыкаются пальцы С и D, т.е. катушка 5 отсоединяется от токоприемника KII; 2) замыкаются пальцы Я1 и М1, т.е. якорный конец Я1 двигателя I соединяется с концом M1 обмотки возбуждения; второй ее конец М2 постоянно приключен к токоприемнику NII; 3) замыкаются пальцы Я2 и PII, т.е. якорный конец Я2 соединяется с токоприемником PII.
При переводе левой половины валика контроллера I с первого на второе положение замыкаются пальцы NI и R2, т.е. главный троллейный провод NI соединяется через пусковое сопротивление R1-R2 с проводом N сети; двигатель 1 начинает вращаться.
При дальнейшем переводе валика со второго на третье положение замыкаются пальцы NI и R2, т.е. выводится сопротивление R1-R2 (пусковые сопротивления R1-R2, R3-R4 и R5-R6 для простоты изображены одноступенными); двигатель 1 набирает полную скорость. Пуск закончен.
При этом путь тока таков: провод Р сети, палец Р контроллера II, замыкающие пластины, палец g, палец g контроллера III, замыкающие пластины, палец e, палец е контроллера I, замыкающие пластины, палец PI, троллейный провод PI, токоприемник PII. Здесь ток разветвляется по двум путям: часть идет в двигатель 1, часть в соленоид 4.
Дальнейший путь тока, идущего в двигатель 1, таков: палец PII контроллера IV, замыкающие пластины, палец Я2, якорь двигателя 1, палец Я1, замыкающие пластины, палец MI, обмотка возбуждения, токоприемник NII, троллейный провод NI, палец NI контроллера I, замыкающие пластины, палец R2, перемычка, палец K1, замыкающие пластины, палец з, палец з контроллера III, замыкающие пластины, палец ж, палец ж контроллера II, замыкающие пластины, палец N, провод N сети.
Дальнейший путь тока, идущего в соленоид 4, таков: зажим PII соленоида 4, соленоид, палец В контроллера IV, замыкающие пластины, палец А, зажим KII соленоида 4, токоприемник KII, троллейный провод K, сопротивление K-K1, палец K1 контроллера I; отсюда путь тока такой же, как и у первой ветви.
Для пуска двигателя I в обратную сторону служит правая половина валика контроллера I; при включении его на первое положение, к троллейному проводу NI присоединяется провод N сети, а к троллейному проводу K, через сопротивление K-K1, провод Р сети.
Не трудно проследить, что при этом возбуждается током уже не соленоид 4, а соленоид 5, который переводит валик контроллера V на первое рабочее положение.
Первому же рабочему положению контроллера V соответствует вращение двигателя 1 в сторону, обратную предыдущему случаю. Дальнейшим поворотом правой половины валика контроллера I на второе и третье положение завершается пуск двигателя.
Принципиальная схема контроллеров II и III почти ничем не отличается от контроллера I. Но благодаря тому, что троллейный провод K присоединен к пальцу K2 контроллера II через сопротивление K-K2 и к пальцу K контроллера III - непосредственно, поворот валика контроллера II в ту или другую сторону от нулевого положения вызывает переключение IV или V контроллера на второе рабочее положение.
Поворот же валика контроллера III в ту или другую сторону вызывает переключение контроллеров IV или V на третье рабочее положение.
Цепь соленоидов 4 и 5 разорвана и концы А и В и С и D разрывов соединены с одноименными пальцами контроллеров V и IV, замкнутыми в нулевом положении замыкающими пластинами. Поэтому при подводе напряжения к одному из соленоидов, цепь второго размыкается и продолжает быть разомкнутой на все время работы первого соленоида.
Проставленный на контроллерах IV и V размер "а" соразмерен так, что размыкание пальцев А и В или С и D при переводе контроллеров на первое рабочее положение должно происходить ранее, нежели пластины первого рабочего положения коснутся соответствующих им пальцев.
Автор полагает, что если пружины 13, 14 и 15 изготовлены достаточно отличающимися друг от друга по силе, необходимой для их сжатия, то всякая регулировка устройства почти отпадает и можно будет не бояться встречающихся в практике колебаний напряжения в сети.
Из всего вышеизложенного нетрудно заключить, что предлагаемое устройство пригодно также для управления четырьмя, пятью и т.д. двигателями движущегося крана. При этом необходимые к описанному трехмоторному устройству добавления сможет сделать каждое сведующее в этом деле лицо.
Одновременная работа двух или более моторов в предлагаемом устройстве невозможна. Поэтому предусмотрены 8 верхних пальцев на контроллерах I, II и III. Благодаря им при работе одного контроллера оба полюса сети отключаются от остальных контроллеров и, при работе одного контроллера, включение какого-либо из оставшихся вызывает отсоединение от работающего обоих полюсов сети; это вызывает немедленную остановку двигателя. Такая блокировка делает устройство безопасным от ошибочного или умышленного включения двух контроллеров одновременно.
Вопрос об управлении и питании тормозных электромагнитов, не затронутый в описании, может быть разрешен двумя путями: либо присоединением тормозных электромагнитов на время работы соответствующих моторов к токоприемникам, питающим соленоиды 4 и 5, либо присоединением их к токоприемникам PII и NII. В обоих случаях необходимые переключения осуществляются небольшим числом добавочных пальцев и пластин в контроллерах IV и V.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного контакторного управления электровозом | 1937 |
|
SU54120A1 |
| Устройство для автоматической загрузки доменной печи | 1933 |
|
SU44565A1 |
| Устройство для автоматического торможения электрического крана | 1941 |
|
SU66968A1 |
| Устройство для автоматического улавливания и опускания штанги токоприемника троллейбуса | 1973 |
|
SU600003A1 |
| Токоприемник транспортного средства | 1987 |
|
SU1437264A1 |
| ШТАНГОУЛОВИТЕЛЬ | 1947 |
|
SU85442A1 |
| Подвесная сварочная шовная машина | 1937 |
|
SU53858A1 |
| Токоприемник электроподвижного состава | 1990 |
|
SU1791182A1 |
| Игральное устройство | 1981 |
|
SU1012930A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМПАУНДНЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 1935 |
|
SU46970A1 |
1. Устройство для дистанционного управления электрическими двигателями, преимущественно двигателями электрических кранов, с применением расположенных на тележке коммутаторов, служащих для селективного включения двигателей с поста управления через посредство общей для всех двигателей двухпроводной цепи управления и управляемых посредством соответствующего соленоида, подвижная часть которого устанавливается в то или иное положение в зависимости от силы тока в цепи управления, регулируемой путем включения в эту цепь того или иного из ряда сопротивлений на посту управления, отличающееся тем, что для управления каждым из двигателей тележки применен на посту управления отдельный контроллер, снабженный как контактами для пуска и избирания направления хода двигателя, включенными в рабочую цепь, так и контактами для включения в цепь управления одного из названных выше сопротивлений, служащих для установления в этой цепи такой силы тока, при которой соответствующий из двух расположенных на тележке коммутаторов производит включение избираемого двигателя на требуемое направление вращения.
2. Форма выполнения устройства по п. 1, отличающаяся тем, что все контроллеры на посту управления снабжены блокировочными контактами, соединенными друг с другом таким образом, чтобы при работе любым из контроллеров все остальные контроллеры были выключены из цепи, а при установке на рабочее положение одновременно двух или большего числа контроллеров из цепи выключались все контроллеры.
3. При устройстве по пп. 1 и 2 применение одного из проводов рабочей цепи, питающей двигатели, в качестве одного из проводов цепи управления.
