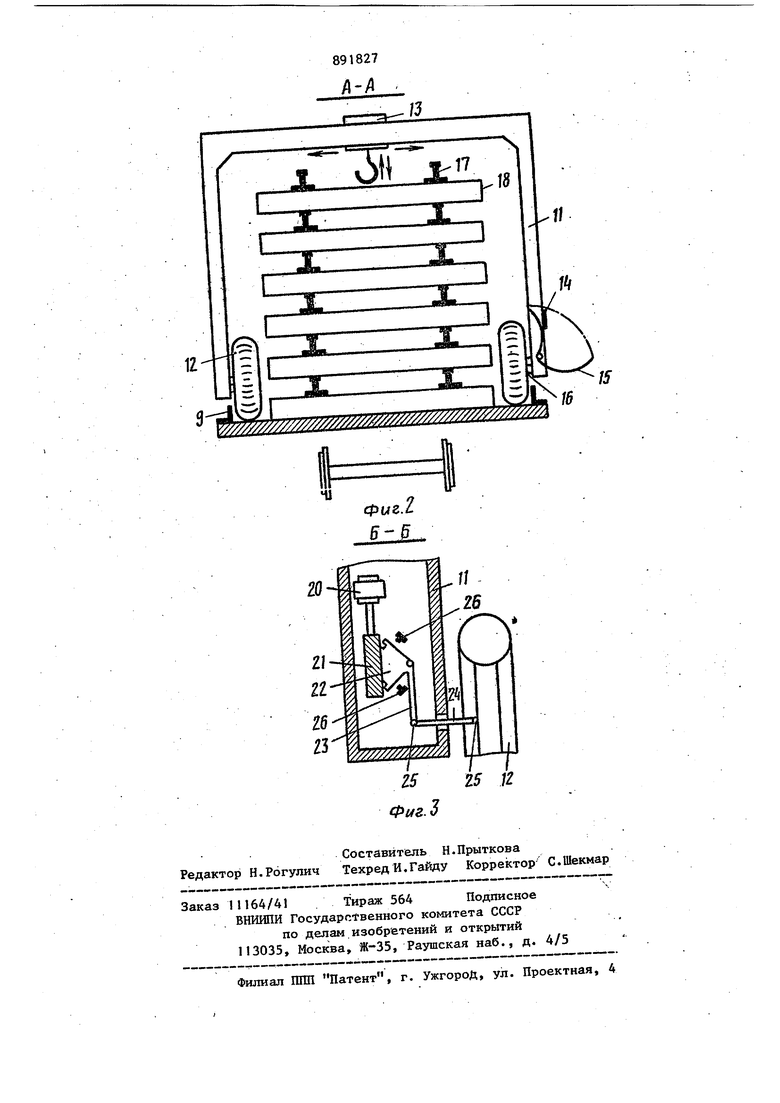
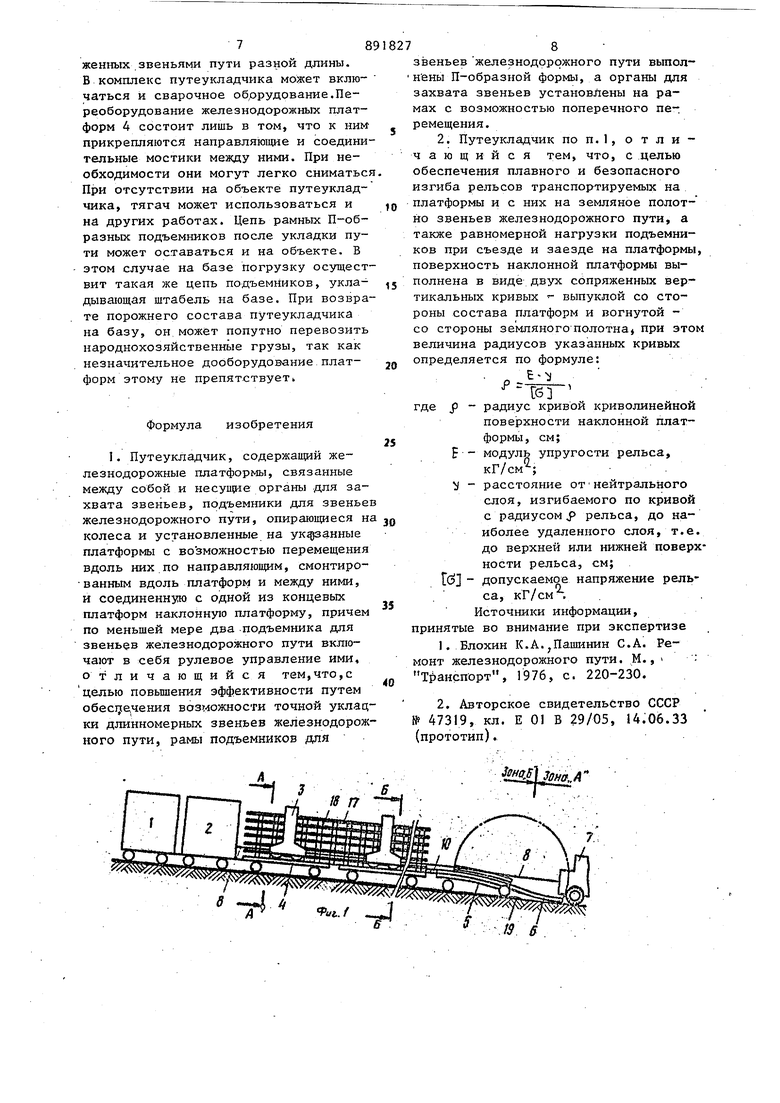
Изобретение относится к устройствам для строительства железных дорог, в частности к устройствам для укладки длиномерных звеньев (.500 м и более) железнодорожного пути. Известен путеукладчик, содержащий железнодорожные платформы, связанные между собой и несущие органы для захвата звеньев, подъемники для звенье железнодорожного пути, опирающиеся на колеса и установленные на указанные платформы с возможностью перемещения вдоль них по направляющим, смонтированным вдоль платформ и межд ними, и соединенную с одной из концевых платформ наклонную платформу, причем по меньшей мере два подъемника для зееньев железнодорожного пу ти включают в себя рулевое управление ими Пи С23 . Однако известные подъемники путеукладчика не могут брать звенья железнодорожного пути из пакета, а так же производить погрузку звеньев н состав -платформы. Путеукладчик не обеспечивает точную укладку звеньев железнодорожного пути по его оси, что снижает его эффективность. Цель изобретения - повышение эффективности путеукладчика путем обеспечения возможности точной укладки длиномерных звеньев железнодорожного пути. Поставленная цель достигается тем, что рамы подъемников для звеньев железнодорожного пути выполнены П-образной формы, а органы Для захвата звеньев установлены на рамах с возмож-i ностью поперечного перемещения. Кроме того, с целью обеспечения плавного и безопасного изгиба рельсов транспортируемых на платформы и с них на земляное полотно звеньев железнодорожного пути,а также равномерной нагрузки подъемников при съезде и заезде на платформы, поверхность наклонной платформы выполнена в виде двух сопря} енных вертикальных кривых - выпуклой со стороны состава платформ и вогну-той - со стороны земляного полотна, при этом величин радиусов указанных кривых определяется по формуле Р- где р - радиус кривой криволинейной поверхности наклонной платформы, см; модуль упругости рельса, кГ/см расстояние от нейтрального слоя, изгибаемого по кривой с радиусом f рельса, до на иболее удаленного слоя, т.е до верхней или нижней повер ности рельса, см; допускаемое напряжение рель са, кГ/см . На фиг.1 изображен путеукладчик общий вид.; на фиг. 2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг. . Путеукладчик содержит локомотив 1, к которому присоединена подвижная железнодорожная энергетическая установка 2 с лебедкой, соединенная с П-образными подъемниками 3, распо ложенными на железнодорожных платформах 4, в конце состава рас1@оложена наклонная платформа 5 с откид ной частью 6. Со стороны наклонной платформы расположен тягач (тягачи) 7, соединенный гибкой связью 8 с цепью П-образных подьемников, котор в свою очередь, соединены между собой и лебедкой такой же связью. На платформах 4 состава с обеих сторон от их продольных осей размещетл направляющие 9 (фиг.2}, а между платформами - откидные соединительные мостики 10 (фиг.1). П-образный подъемник 3 состоит из рамы 11, опирающейся на пневмоколеса 12. В верхней части подъемни ка 3 расположен орган 13 для захват звеньев,а в боковой части рамы пульт 14 управления и откидное сидение 15. В корпусе боковой части рамы, а также в пространстве между рамой и пневмоколесом находится рулевое управление 16. На платформах 4 состава, под под емниками, находится пакет звеньев железнодорожного пути, состоящих из рельсов I7, скрепленных со шпалами 18. Путеукладчик расположен на рель сах 19 железнодорожного пути. 74 Рулевое управление (фиг.З состоит из электродвигателя 20, на оси которого расположен червяк 21, который, в свою очередь, соединен с зубчатым сектором 22, соединенным последовательно с коромыслом 23 и тягой 24. Между коромыслом и тягой, а также между тягой и пневмоколесом смонтированы шарниры 25. С обеих сторон зубчатого сектора расположены концевые выкл1бчатели 26, жестко прикрепленные к корпусу боковой части р амы. Для обеспечения плавного к безопасного изгиба в пределах упругой деформации длинномерных плетей транспортируемых с.состава на земляное полотно или с базы на состав звеньев пути, а также с целью уменьщения длины наклонной платформы 5, ее поверхность выполнена в виде двух сопряженных вертикальных кривых, рассчитываемых по формуле Г1. Так как рельс имеет строго определенные размеры, радиус кривой в основном зависит от модуля упругости его стали в наиболее неблагоприятных условиях, т.е. от наиболее низкой расчетной температуры,в которой работает путеукладчик. Чтобы уменьшить потребную силу тяги, пневмоколеса 12 подъемников 3 могут приводиться в движение электроприводом ( моторколесоj. В шинах этих колес давление регулируется с пульта,, что позволяет выбрать наименьшее в определенных условиях (например, при размокших грунтах земляного полотна) сопротивление качению. Колеса оборудованы тормозами. Привод рулевого управления 16 может быть гидравлическим, механическим, электрическим. Механический привод наименее подходящий, так как передать угол поворота колес ерез раму довольно сложно. Проще это выполнить двумя другими способами. На чертеже показана схема с электрическим приводом. Поворотное усилие передается от электродвигателя 20 через червяк 21, зубчатый сектор 22, коромысло 23 и, соединенную при помощи шарниров 25 с колесом 12, тягу 24. С обеих сторон рамы I1 смонтированы одинаковые рулевые управления 16. Одинаковый угол поворота правого и левого колес может обеспечиваться при помощи концевых выключателей 26, выключающих электродвигатель 20 после поворота колес 12,допустим на угол 5. Если оператору надо повернуть ког леса подъемника 3 на 5°, в левую сторону, он на пульте 14 управления нажимает кнопку 5 влево, оба электродвигателя 20 включаются, а концевые выключатели 26 выключат их именно в этом положении. Достигнув требуемого результата,оператор нажимает кнопку Нейтраль и электродвигатель возвращает оба колеса в исходное положение Могут быть устроены и дополнительные пары концевых -выключателей, срабатывающих, например, при 10°, 15 и других углах поворота колес.
Путеукладчик работает следующим образом.
;По прибытии путеукладчика;к исходному месту работ (в зону Б, т.е к концу рельса 19 ранее уложенного пути, на земляное полотно опускается откидная часть 6 наклонной платформы 5, органы 13 для захвата звеньев, установленные на рамах 11 П-образных подъемников 3, приподнимают верхнее звено и тягач 7, находящийся на земляном полотне, стягивает при помощи гибкой связи В П-образные подъемники 3 вместе с подвешенным звеном пути на земляное полотно. Тягач 7 движется по геометрической оси пути (по прямой или кривой в плане) и по той же траектории при помощи рулевого устройства 16 вытягивается цепь загруженных звеном пути подъемников 3.
По прибытии подъемников на место укладки звена (зона А) операторы по команде из центра управления при помощи органов 13 для захвата звеньев синхронно опускают звено так, чтобы н,ижняя плоскость шпал находилась на расстоянии около 10 см над поверхностью земляного полотна. Теперь при помощи органов 13, которые могут передвигаться в поперечном направлении, окончательно корректируется положение звена по геодезической разметке пути.
После выполнения корректировки по команде звено синхронно опускается на земляное полотно. После этого производится стыковка с рельсами ранее уложенного звена. При необходимости, перед стыковкой рельсов цепь подъемников может несколько перемещаться назад, т.е. в сторону стыка при помощи лебедки, устроенной на энергетической установке 2.
Чтобы можно взять верхнее звено из пакета их на платформах, высота рамы 11П-образного подъемника 3 должна быть больше высоты пакета (но не превышать габарит, норннруемый техническими услрш1йми, а высота пакета, в свою очередь, ограничивается грузоподъемностью платформ.
Путеукладчик обеспечивает точную укладку длинномерных звеньев железнодорожнохо пути по всей длине на сложных сопряжениях разных кривых, погрузку звеньев на платформы состаг ва (с базы или с ремонтируемого участка дороги), если состав и ремонтируемый участок шш штабель звеньев на базе находятся не на одной прямой, а расположены на криврй.
Возможность Td4HO по геодезической разметке уложить звенья пути
большой длины практически полностью исключает ручной труд по рихтовке пути в плане.
Синхронный подъем и синхронное опускание звена может осуществляться и без помощи операторов на каждом подъемнике, т.е. с командного пункта при noMonpi телемеханики. На командный пункт (тягач) с каждого подъемника поступает сигнал о положении звена в плане и высоты над земляным полотном..
Путеукладчик является скоростным погрузочно-путеукладочным комплекcoMi Конструкция и габариты его позволяют вьтолнять снятие старых звеньев пути (при ремонте), а также укладку новых и в стесненных условиях,например, тоннелях
Длина погружаемого и укладываемого звена пути может быть разной,начиная с коротких отрезков н вплоть до 500 м и более, в зависимости от мощности тягачей, готовности земляного полотна и т.п. При нербхрдимости укладки пути более короткими отрезками (на определенных участках трассы ) в состав путеукладчика может включаться несколько платформ, загруПосле укладки звена по команде с центра управления цепь рамных подъемников 3 с помощью лебедки возвращается на платформы 4 за очередшлм звеном, т.е. в зону Б. Аналогично выполняются Операции при взятии релы сошпальной решетки со штабеля на базе, транспортировке ее на состав и v укладке в штабель на платформах путеукладчика. женных звеньями пути разной длины. В комплекс путеукладчика может включаться и сварочное обррудование.Переобору до ванне железнодорожных платформ 4 состоит лишь в том, что к ним прикрепляются направляющие и соедини тельные мостики между ними. При необходимости они могут легко сниматьс При отсутствии на объекте путеукладчика, тягач может использоваться и на других работах. Цепь рамных П-образных подъемников после укладки пути может оставаться и на объекте. В этом случае на базе погрузку осущест вит такая же цепь подъемников, укладывающая штабель на базе. При возвра те порожнего состава путеукладчика на базу, он может попутно перевозить народнохозяйственные грузы, так как незначительное дооборудование платформ этому не препятствует Формула изобретения 1. Путеукладчик, содержащий железнодорожные платформы, связанные между собой и несущие органы для захвата звеньев, подъемники для звенье железнодорожного пути, опирающиеся н колеса и установленные на ук анные платформы с возможностью перемещения вдоль них по направляющим, смонтированным вдоль платформ и между ними, и соединенную с одной из концевых платформ наклонную платформу, причем по меньшей мере два .подъемника для звеньев железнодорожного пути включают в себя рулевое управление ими, отличающийся тем,что,с целью повышения эффективности путем обес1з;ечения возможности точной уклац ки длинномерных звеньев железнодорож ного пути, рамы подъемников для В звеньев железнодорожного пути выполнены П-образной формы, а органы для захвата звеньев установлены на рамах с возможностью поперечного перемещения. 2. Путеукладчик по п.1, о т л и чающийся тем, что, с целью обеспечения плавного и безопасного изгиба рельсов транспортируемых на платформы и с них на земляное полотно звеньев железнодорожного пути, а также равномерной нагрузки подъемников при съезде и заезде на платформы, поверхность наклонной платформы выполнена в виде двух сопряженных вертикальных кривых выпуклой со стороны состава платформ и вогнутой со стороны земляного полотна, при этом величина радиусов указанных кривых определяется по формуле: Е-Ъ где f - радиус кривой криволинейной поверхности наклонной платформы , см; модуль упругости рельса, кГ/см ; . расстояние отнейтрального слоя, изгибаемого по кривой с радиусомр рельса, до наиболее удаленного слоя, т.е. до верхней или нижней поверхности рельса, см; Гс - допускаемое напряжение рельса, кГ/см . Источники информации, ринятые во внимание при экспертизе 1.Блохин К.А.,Пашинин С.А. Ремонт железнодорожного пути. М., ()аиспорт, 1976, с. 220-230, 2.Авторское свидетельство СССР 47319, кл. Е 01 В 29/05, 14.06.33 (прототип).
891827
Л-У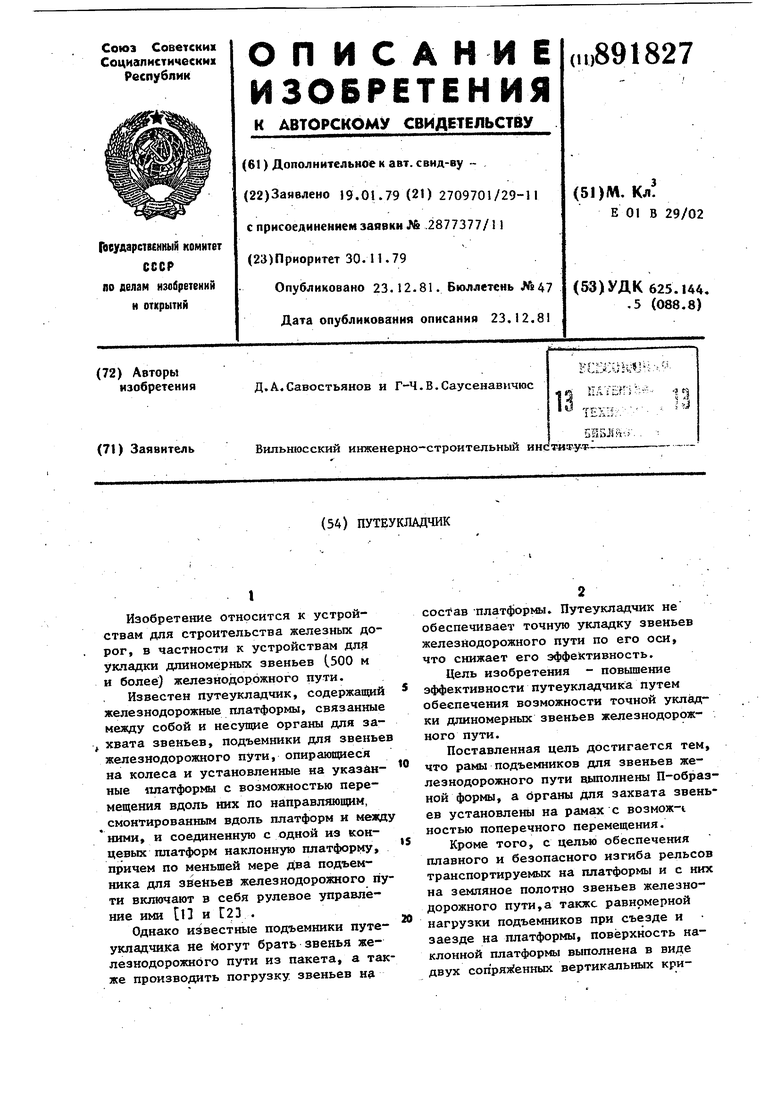
| название | год | авторы | номер документа |
|---|---|---|---|
| Путеукладчик | 1982 |
|
SU1030455A1 |
| ПУТЕУКЛАДЧИК | 1999 |
|
RU2140478C1 |
| Путеукладчик на комбинированном ходу | 1986 |
|
SU1318624A1 |
| Путеукладчик | 1939 |
|
SU56925A1 |
| ПРИЦЕПНОЙ ПУТЕУКЛАДЧИК НА КОМБИНИРОВАННОМ ХОДУ | 1971 |
|
SU308138A1 |
| Путеукладчик на комбинированном ходу | 1986 |
|
SU1444453A2 |
| Путеукладчик | 1989 |
|
SU1664944A1 |
| ПУТЕУКЛАДЧИК | 1999 |
|
RU2143513C1 |
| ПУТЕУКЛАДЧИК ТРАКТОРНЫЙ | 2023 |
|
RU2808047C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ГОТОВЫХ ЗВЕНЬЕВ ВЕРХНЕГО СТРОЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1932 |
|
SU38662A1 |