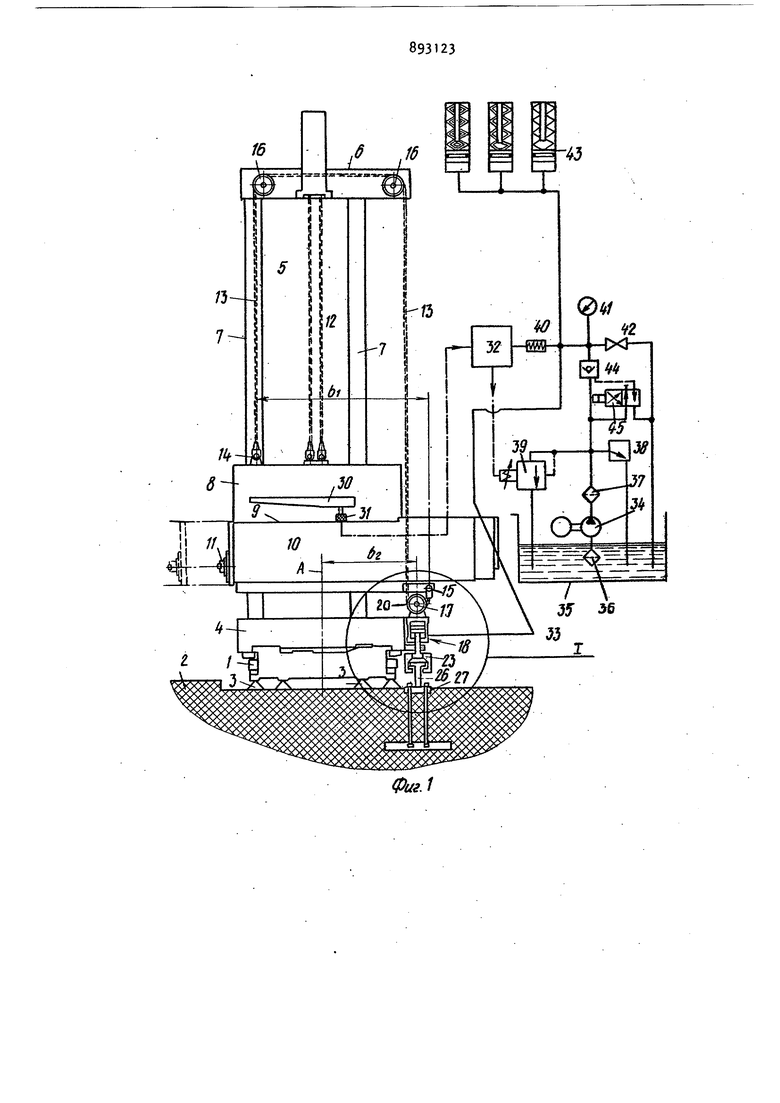
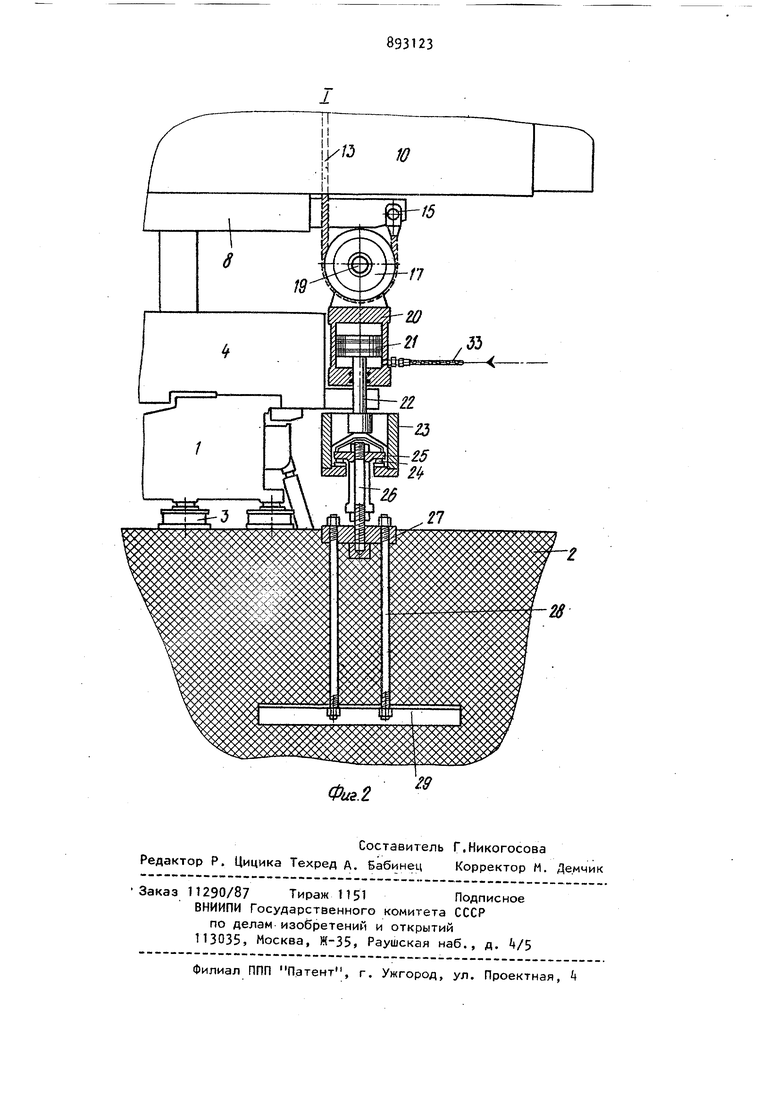
3 представляют собой часть колонны 5 или закреплены на ней. На суппорте 8 находится горизонтальная направляющая 9, на которой подвижно установлен ползун 10, несущий рабочую головку 11 Вес суппорта 8 и вес ползуна 10 воспринимаются кабелями 12. Кабель 13 или другой подобный гибкий элемент противополох ными концами обычным образом закреплен в двух различных точках и 15 суппорта 8. В частности точка 14 выбирается вверху суппорта 8 и вблизи от его передней стенки, тогда как точка 15 выбирается внизу суппорта 8 и вблизи от его задней стенки. Прямая линия, которая соединяет названные точки k и 15 между собой, образует заранее определенный угол с вертикалью,, проходящей через каждую из этих точек, а отрезок прямой, соединяющий эти точки 1 и 15 между собой, обладает заранее определенной длиной горизонтальной проекции его Ь,. Кабель 13 взаимодействует с вращающимися направляющим и возвратным роликами 1б, которые устанавливаются на траверсе 6, кроме того, кабель 13 находящийся вблизи точки 15, предусмотренной для закрепления его на суппорте 8, находится в контакте с роликом 17, который установлен на натяжном устройстве 18, находящимся йиж суппорта 8, Натяжное устройство 18 установлено на фундаменте 2 вне и независимо от станка. Для роликов 16 и 17 выбрано такое расположение, что конечные отрезки кабеля 13, которые сходятся на предусмотренные для закрепления на суппорте точки 1 и 15 направлены верти кально, соответственно вверх и вниз. Ролик 17 обычным и не представлен ным здесь способом монтируется с обе печением возможности его вращения на оси 19. которая направлена горизонтально и перпендикулярно направлению перемещения ползуна 10. Эта ось уста навливается вверху цилиндра 20, в котором движется в осевом направлени поршень с которым жестко связан шток 22, соединенный с ползуном 23о Ползун 23 через дисковый элемент 2 связан с направляющей 25, которая на правлена горизонтально в сторону пер мещения колонны 5 станка. Направляющая 25 закрепляется на заранее определенной плоскости посредством 34 нескольких болтов 26 к диску 27, который жестко связан с фундаментом 2 с помощью растяжек 28, воздействующих на траверсу 29, улоиенную в железобетонную кладку фундамента 2. Вертикальная ось цилиндра 20,т.е. вертикальная ось натяжного устройства 18 находится на заранее определенном расстоянии bj от вертикали центра тяжести А, принадлежащей станку базовой поверхности k. На суппорте 8 жестко установлена кривая управления 30, взаимодействующая с датчиком положения 31, жестко закрепленным на ползуне 10 и подающим электрические сигналы в электронный блок 32. Маслопровод давления 33 гидросистемы подсоединен к цилиндру ниже поршня 21 . Гидросистема содержит насос З.бак 35, фильтры Зб и 37.вентиль безопасности 38, электрогидравлический вентиль 39, датчик давления tO, манометр tl, сливной кран k2, аккумуляторную батарею 43, управляемый обратный вентиль 44, вентиль направления 45. Устройство работает следующим образом. При перемещении ползуна 10 датчик положения 31 взаимодействуя с кривой управления 30, подает сигнал на электронный блок 32 об изменении положения ползуна. Насос 34 забирает масло из бака 35 через фильтр Зб. Через фильт з 37 это масло направляется в контур, снабженный вентилем безопасности 38, Вентиль установлен на давление, которой выше, чем наивысшее давление маслянного контура при эксплуатации. При этом давлением в контуре постоянно регулируется электрогидравлическим вентилем 39, управляемым элек-триуеским сигналом, поступающим от электронного блока 32, который сравнивает поступающую с датчика положения 31 заданную величину давления с фактически имеющейся в контуре величиной давления, которая передается датчиком давления 40, встроенным в этот контур, и дает сигнал на электрогидравлический вентиль 39, что позволяет поддерживать требуемое давление в контуре с минимальной ошибкой. Масло давления, направляемое в цилиндр ((причем давление может изменяться любым образом), воздействует
5
на нижнюю поверхность поршня 21. В результате этого поршень 21 воздействует с изменяемым и направленным вверх усилием F через шток 22 и дисковый элемент 2 на направляющую 25, через которую это усилие через болты 26 и диск 27 передается фундаменту 2,
Вследствие усилия реакции цилиндр 20 воспринимает равное, но противопо ложно направленное,т.е. направленное вниз, усилие f, которое передается на ролик 17 и с него на кабель 13, связанный с упомянутым роликом. Вслествие этого на участки кабеля 13,при легающие к ролику 17, действуют два усилия, равные оба они направлены вниз. Следовательно, в то время как на тоцку 15, предназначенную для закрепления кабеля 13 на суппорте 8, действует усилие а,/2, направленное вниз, на точку 14, предназначенную для закрепления на суппорте 8 этого же кабеля 13, действует равное ей усилие , направленное вверх. Поэтому суппорт 8 испытывает воздействие момента, направленного вправо и равного М( /2 X Ь, .
Одновременно усилие F , направленное вниз и приложенное к ролику 17, представляет собой внешнее, вниз направленное усилие для системы: базовая поверхность k, колонна 5 удаленной от вертикали центра тяжести базовой поверхности 4 на расстояние, равное bg . Это внешнее усилие Г, которое является любой, переменной величиной, оказывает на систему колонна - базовая поверхность - станина домкраты станков воздействие в виде момента, направленного вправо и равного М Ь, который направлен навстречу скручиванию, возникающему в колонне за счет изгибающего момента, вызываемого движениём-ползуна 10. Кроме того, он противодействует осадке ((податливости), которой подвергаются базовая поверхность, станина, домкраты в результате действия названного изгибающего момента. Для любого положения, занятого ползуном 10 относительно суппорта 8, к ролику 17 может быть приложено замеренное и направленное вниз усилие ( , которое в состоянии создать на суппорте 8 изгибающий момент, равныйили больший, чем момент на суппорте, вызванный движением ползуна 10, и противоположный ему по направлению. То же усилие
23«
fi одновременно в состоянии создать в системе колонна - базовая поверхность - станина - домкрат станка момент, который устраняет негатиные воздействия, а именно воздействия, которые прилагаются к колонне за счет скручивания,вызываемого этими же перемещениями ползуна 10. Аккумуляторы 3 выполняют функции поддержания давления масла в контуре в тех случаях, когда отсутствует питание электросети. Снимая с манометра показания значения имеющегося в контуре давления масла, необходимого для каждого из занимаемых ползуном 10 положений относительно суппорта 8, производят регулирование описанного контура. Это необходимо для определения требуемых усилий Ijg,, которые должны быть приложены к ролику 17.. Эти величины давления можно поддерживать неизменными, вручную перемещая шток, принадлежащий датчик 31. После того, как будут получены различные значения давления, которые требуются для каждого положения, занятого ползуном 10 относительно суппорта 8, и после того, как точность этих значений будет проверена с помощью достигнутого, правильного устранения скручивания, реализуется кривая управления таким образом, что на шток датчика 3 воздействуют те же перемещения, которые перед этим сообщались вручную, а именно дл того, чтобы получить при различных положениях, занимаемых ползуном 10. значение давления в контуре давления
которое обеспечивает требуемое усилие FJL, прикладываемое к ролику 17, Для устранения скручивания.
Fлaвнoe преимущество такой конструкции устройства состоит в том, что вертикальное (изменяемое)., усилие которое воздействует на этот ролик натяжного устройства и направлено вниз, обеспечивает два равных и противоположно действующих усилия, которые воздействуют на точки, предусмотренные для закрепления кабеля на несущем органе подвижной головки. Эти усилия вызывают в несущем органе появление момента, чья величина (переменная при изменении положения, занимаемого рабочей головкой) может быть просто рассчитана с тем, чтобы мог быть устранен момент, который вызывается весом рабочей головки и зависит от положения, занимаемого
7
:рабочей головкой на ее несущем элементе. Вследствие эксцентриситета, существующего относительно центра тяжести и в связи с тем, что соответствующее усилие реакции перемещается на фундамент независимо от самого станка, названное вертикальное усилие воздействует на колонну станка с моментом, действующим противоположно скручиванию, действующему на колонну за счет веса и положения рабочей головки. Вследствие этого ликвидируются негативные воздействия, возникающие при скручивании, на колонну, на базовую поверхность, на станину И на домкраты станка.
Формула изобретения Устройство для устранения скручиваний, возникающих в тяжелых станках
8
включающее суппорт, перемещающийся вертикально с ползуном, установленным на последнем с возможностью горизонтального перемещения, натяжное устройство, направляющие блоки и гибкий элемент, отличающееся тем, что, с целью повышени надежности работы, гибкий элемент своими противоположными концами закреплен в двух точках суппорта, отстоящих друг от друга и находящихся на противоположных сторонах последнего, причем натяжное устройство размещено вне станка.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № i 02t08, кл. В 23 В 47/26, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ДАВИЛЬНОЙ ОБРАБОТКИ | 1970 |
|
SU259033A1 |
| Станок для навивки змеевиков | 1977 |
|
SU659236A1 |
| СТАНОК ДЛЯ НАМОТКИ МАГНИТОПРОВОДОВ | 1965 |
|
SU170104A1 |
| Устройство для крепления ряда соединительных скоб на конце транспортерной ленты | 1990 |
|
SU1838691A3 |
| Устройство для вырубки изделий из листового и ленточного материала | 1978 |
|
SU791551A1 |
| Устройство для вырубки деталей из полосового и ленточного материала | 1978 |
|
SU770827A1 |
| УСТРОЙСТВО ДЛЯ НАКАТЫВАНИЯ ГАЛТЕЛЕЙ ШЕЕК ТЯЖЕЛЫХ КОЛЕНЧАТЫХ ВАЛОВ | 1966 |
|
SU179785A1 |
| Металлорежущий станок для обработки отверстия ступицы железнодорожных колес | 2023 |
|
RU2809883C1 |
| РЕЗЬБОТОКАРНЫЙ ПОЛУАВТОМАТ С НЕРЕВЕРСИВНЫМ ШПИНДЕЛЕМ | 1969 |
|
SU241904A1 |
| Устройство для установки стационарной буровой платформы на морское дно | 1975 |
|
SU959636A3 |