(54) УСТРОЙСТВО ДЛЯ ЗАХВАТА ШТУЧНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Грузозахватное устройство | 1979 |
|
SU885138A1 |
| Захват для изделий с внутренней полостью | 1987 |
|
SU1463696A1 |
| Грузозахватное устройство | 1988 |
|
SU1594113A1 |
| Клещевой захват-кантователь для штучных грузов | 1985 |
|
SU1299938A2 |
| Автоматический захват для штучных грузов | 1977 |
|
SU650946A1 |
| Захватное устройство | 1983 |
|
SU1189782A1 |
| Клещевой захват | 1982 |
|
SU1054272A1 |
| Захват для изделий с центральным отверстием | 1986 |
|
SU1409572A1 |
| Устройство для захвата труб | 1981 |
|
SU998285A1 |
I
Изобретение относится к устройствам для захвата штучных грузов, в частности стерионевых предметов.
Известно устройство для захвата штучных грузов, содержащее шарнирно соединенные между собой клеш.евины, связанные посредством тяг с серьгой для навески на грузоподъемный механизм, и закрепленные на концах клещевин подшипники, в которых установлены с возможностью вращения вокруг горизонтальной оси втулки с захватными элементами 1.
Однако известное устройство недостаточно надежно в работе и неудобно в эксплуатации поскольку не обеспечивает предварительного зажима наклонно расположенного груза.
Цель изобретения - улучшение условий эксплуатации и повышение надежности в работе.
Данная цель достигается тем, что устройство снабжено полой штангой, установленной во втулках, и расположенной внутри нее с возможностью осевого перемещения подпружиненной тягой, при этом одна из втулок жестко прикреплена к штанге, а другая втулка соединена с тягой с помощью
поводка, расположенного в отверстии, выполненном Б щтанге.
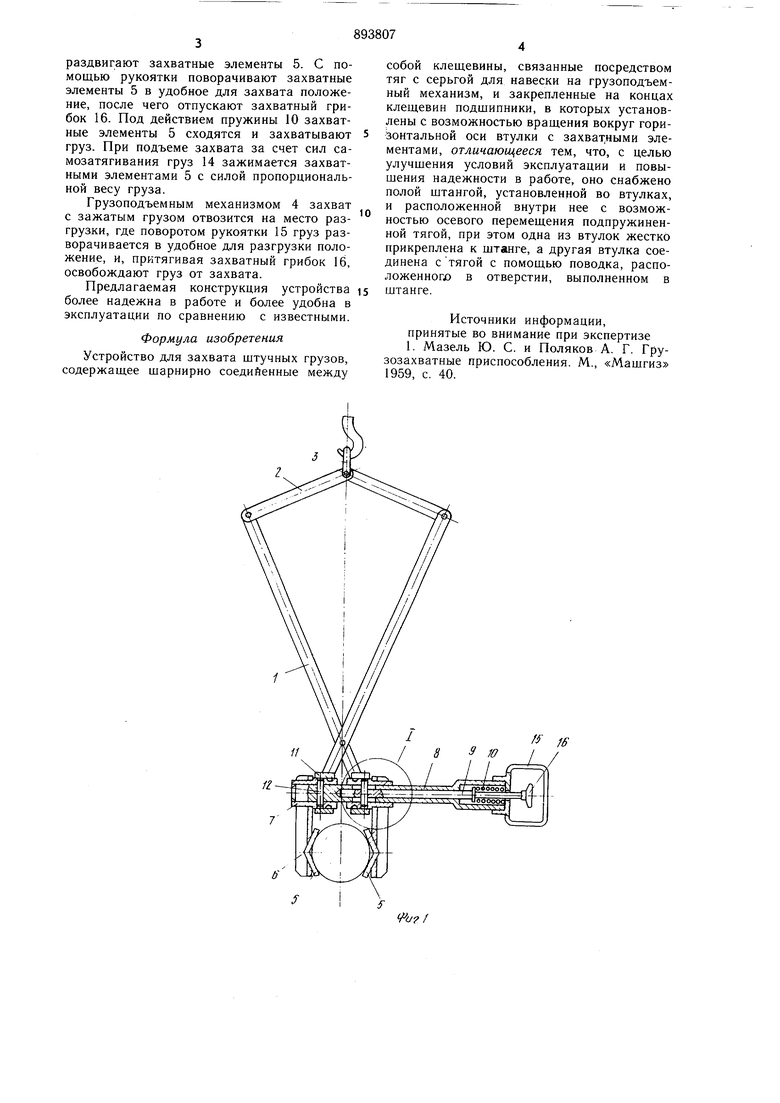
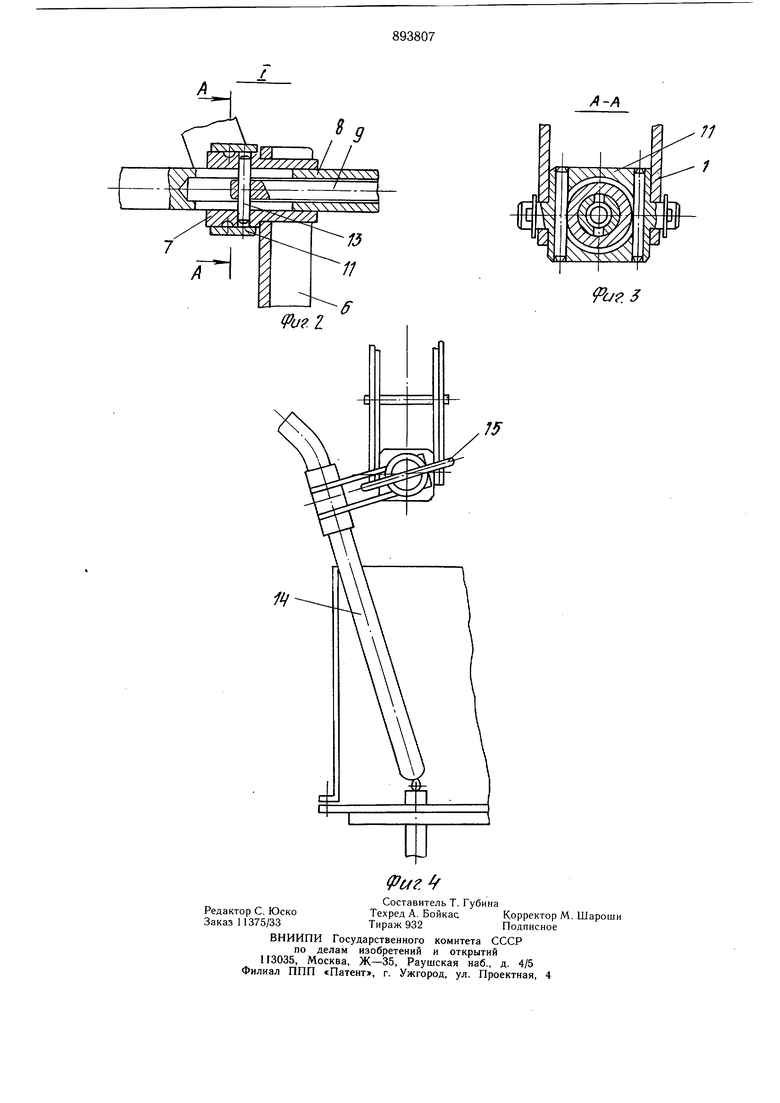
На фиг. 1 изображено устройство для захвата штучных грузов, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - устройство в момент захвата груза.
Устройство для захвата штучных грузов содержит клещевины 1, тяги 2, серьгу 3, навещиваемую на крюк грузоподъемного механизма 4, и захватные элементы 5. Каждый захватный элемент 5 в свою очередь
10 смонтирован на ребрах 6 и втулке 7. Внутри втулок 7 коаксиально расположены полая штанга 8 и тяга 9 с пружиной 10. Втулки 7 снабжены подщипниками И, закрепленными с возможностью поворота на 15 нижних концах клещевин 1. Одна из втулок 7 жестко закреплена с помощью штифта 12 на щтанге 8, а другая при помощи тяги 9 и поводка 13 имеет возможность осевого перемещения вдоль щтанги 8.
Устройство работает следующим обра20зом.
Захват опускают подъемным механизмом 4 на захватываемый груз 14. Притягивая к рукоятке 15 захватный грибок 16, раздвигают захватные элементы 5. С помощью рукоятки поворачивают захватные элементы 5 в удобное для захвата положение, после чего отпускают захватный грибок 16. Под действием пружины 10 захватные элементы 5 сходятся и захватывают груз. При подъеме захвата за счет сил самозатягивания груз 14 зажимается захватными элементами 5 с силой пропорциональной весу груза. Грузоподъемным механизмом 4 захват с зажатым грузом отвозится на место разгрузки, где поворотом рукоятки 15 груз разворачивается в удобное для разгрузки положение, и, притягивая захватный грибок 16, освобождают груз от захвата. Предлагаемая конструкция устройства более надежна в работе и более удобна в эксплуатации по сравнению с известными. Формула изобретения Устройство для захвата штучных грузов, содержащее шарнирно соедиАенные между собой клещевины, связанные посредством тяг с серьгой для навески на грузоподъемный механизм, и закрепленные на концах клещевин подщипники, в которых установлены с возможностью вращения вокруг горизонтальной оси втулки с захватными элементами, отличающееся тем, что, с целью улучшения условий эксплуатации и повышения надежности в работе, оно снабжено полой штангой, установленной во втулках, и расположенной внутри нее с возможностью осевого перемещения подпружиненной тягой, при этом одна из втулок жестко прикреплена к штанге, а другая втулка соединена с тягой с помощью поводка, расположенного в отверстии, выполненном в штанге. Источники информации, принятые во внимание при экспертизе 1. Мазель Ю. С. и Поляков А. Г. Грузозахватные приспособления. М., «Мащгиз 1959, с. 40.
