1
Изобретение огносйгся к подъемнотранспоргному оборудованию, а именно к краЕЮВым авгомагическим захватам для шгучнык грузов.
Известен захват для штучных грузов, содержащий две клещевины с серьгой для навески на крюк крана и фиксирующим устройством, включающим храповое колесо и собачку, взаимодейогвующую с храповым колесом и связанную аосредсгБом тяги с серьгой l ,
Этот захват имеет значительные габариты по высоте и не пригоден для ра боты в низких производственных помещениях.
Наиболее близким к изобретению техническим решением является автоматический захват для штучных грузов, содержащий раму с серьгой для навески на крюк крана, шарнирно закрепленные на раме захватные крюки с механизмами фиксации и боковыми направляющими стойками 2 . Однако этот захват
также имеет больщие габариты по высоте.
Целью изобретения является увеличение высоты подъема груза. Для этого в верхней части каждого захватного крюка закреплен палец-водило, а каждый фиксирующий механизм выполнен в виде поворотной пластины с жестко закрепленными на ней клиновидным и U -образным выступами, взаимодействующими с водилом,и шарнирно закрепленным подпружиненным двуплечим рычагом. Кроме того, боковые направляющие стойки выполнены разной длины.
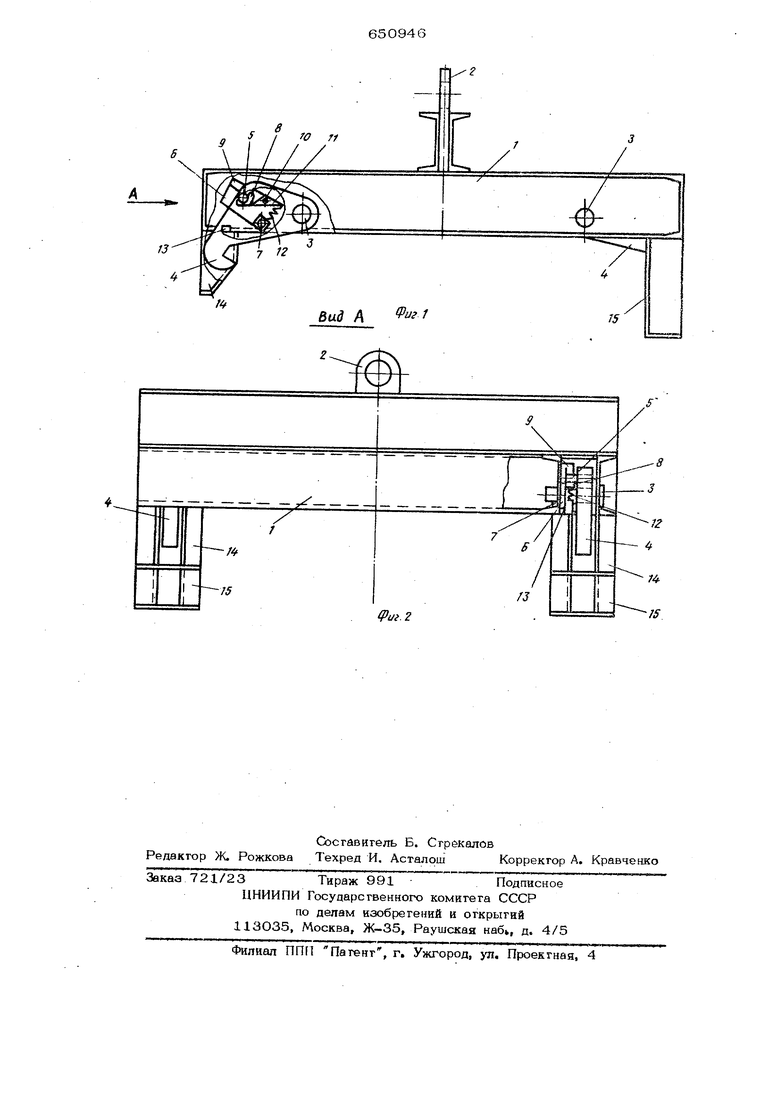
На фиг. 1 изображен предлагаемый автоматический захват, вид спереди с частичным разрезом; на фиг. 2 - то же вид сбоку с частичным разрезом.
Автоматический захват состоит из рамы 1 с установленной на ней серьгой 2 и щарЕ1Ирно закрепленных на осях 3 четырех захватных крюков 4. Оси 3 п ворота захватных крюков 4 смещены относигепьно нижних аахвагных концов крюков 4 к оси симметрии рамы. Каждый захватный крюк 4 имеет закрепленный на нем палец-водило 5, который взаимодействует с фиксатором. Фиксатор каждого захватногчэ крюка 4 представляет собой поворотную пластину 6, установлв - ную при помощи оси 7 на кощах рамы 1 за осью 3 поворота захватных крюков 4. На пластине 6 фиксатора жестко закреплены U -образный высгуп 8 и расположенный за ним клиновидный выступ 9, На оси Ю шарнирно закреплен двуплечий рычаг 11, присоединенный одним концом с помощью пружины 12 к пластине 6 фиксатора. Другим концом рычаг 11 контактирует с вершиной U -образного выступа. Под каждой пластиной 6 фиксатора на раме 1 жестко закреплен упор 13. К рамы 1 около каждого крюка 4 прикреплены короткие направляющие стойки 14 с одной стороны и длинные напраЕшяющие стойки 15 с другой стороны, и -образный 8 и клиновидный 9 выступы направлены вершинами в сторону оси 7 поворота пластины 6 фиксатора.
Предлагаемый захват работает следующим образом.
Захват, подвешенный серьгой 2 на крюк грузоподъемного механизма, подводят к изделию (на Чертеже не показано) тек, что короткие направляющие сгойки 14 проходят над изделием до тех пор, пока длинные направляюшйе стойки 15 не упрутся в него. В это время захватные крюки 4 разведены, и их нижние захватные концы не выступают внутрь за направляющие стойки 14 и 15, так как палец-водило 5 каждого крюка 4 расположен во впадине IT-образного выступа 8 и стопорит крюк 4 в открытом положении. Затем захват опускают на изделие, крюки 4, упираясь внутренней стороной в изделие, поворачиваются вокруг осей 3, выводя каждое водило 5 из впади ны и-образного выступа 8. При этом плшзтакы 6 фиксаторов под собственным весом поворачиваются относительно осей 7ДО упоров 13. При подъеме захвата крюки 4 под собственным весом прижимаются к изделию и, поворачиваясь на осях 3, захватывают его, а водило 5 каждого крюка в это время проходит рядом с вершиной и-образного выступа 8 н, преодолевая сопротивление пружины 12, поворачивает дьуплечий рычаг 11 огносигельно оси 10. Рычаг 11, пропустив водило 5, под действием пружины 12
возвращается пааад и прижимается снизу к веритне J- збриз1юго выступа 8.
Захват готов к транспортированию изделия.
При опускании груза рама 1 захвата ложится на изделие. Крюки 4, упираясь внутренней стороной в изделие, поворачиваются вокруг осей 3, а водило 5 капдого крюка 4 в это время поворачивает
пластину 6 фиксатора, упираясь и скользя последовательно по нижней стороне двуплечего рычага 11, нижней стороне и -образного выступа 8, а затем по нижней стороне клиновидного выступа 9.
При подъеме захвата водило 5 каждого крюка 4 западает во впадину XJ-образного выступа 8, крюк 4 фиксируется в открытом положении, и захват свободно, снимается с изделия. Затем цикл повторяется.
Благодаря расположению фиксаторов на каждом захватном крюке описываемый захват имеет значительно меньшие габариты по высоте по сравнению с извест-
ными.
Формула изобретения
1.Автоматический захват для штучных грузов, содержащий раму с серьгой для навески на крюк крана, шарнирно закрепленные на раме захватные крюки, фиксирующие механизмы для удержания крюков в раскрытом и закрытом положе- боковые направляющие стойки, отличающийс я тем, что, с целью увеличения высоты подъема груза, в верхней части каждого захватного крюкя закреплен палец-водило, а каждый фиксирующий механизм выполнен в виде поворотной пластины с жестко закрепленными на ней клиновидными uU-образными выступами, взаимодействующими с пальцем-водилом и шарнирно.Закрепленным подпружиненным двуплечим рычагом.
2.Автоматический захват для щтучных грузов по п. 1, о т л и ч а ю ш и и с я тем, что, с целью облегчения наведения его на груз, боковые неправ-ляющие стойки выполнены рваной длины.
Источники информации, принягуе во внимание при экспертизе
1.Авторское свидетельство СССР №139414, кл, В 66Г,1/44, I960,
2.Меламеда С, М. Автоматические захватные устройства для штучных грузов, М,, Машииоегроение, 1965, с, 89, фиг. 55. Вид Л
Хи
X
-/«
f
fpui.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ | 1993 |
|
RU2072958C1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
| Захватное устройство для грузов с грибовидной головкой | 1975 |
|
SU673589A1 |
| УСТРОЙСТВО ДЛЯ БЛОКИРОВАНИЯ ПОДВЕСКИ | 2007 |
|
RU2340469C1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захват для грузов с отбортовкой | 1990 |
|
SU1766820A1 |
| Захватное устройство для изделий с вертикальным отверстием | 1990 |
|
SU1782913A1 |
| Грузозахватное устройство | 1985 |
|
SU1553505A1 |