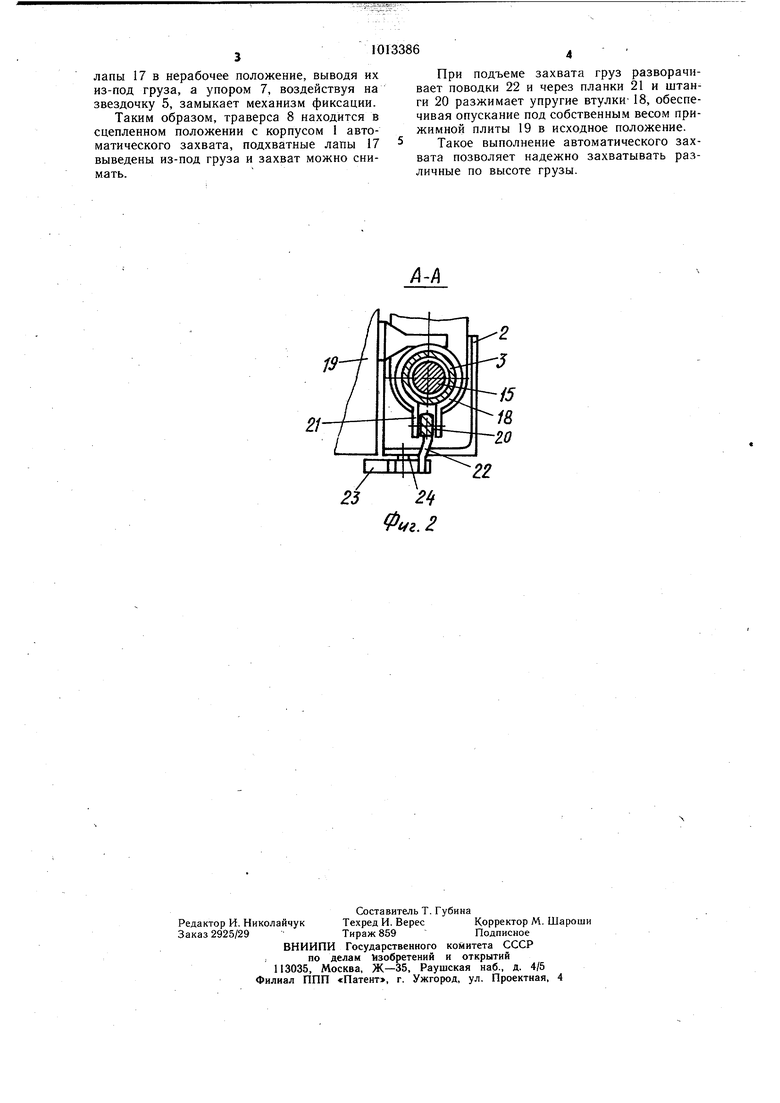
Изобретение относится к транспортированию грузов и может использоваться при перемещении штучных грузов, уложенных в тар}, на поддонах, подкладках и т.д. Известен автоматический захват для штучных грузов, содержащий навешиваемую на крюк грузоподъемного механизма траверсу, кинематически связанный с ней корпус, в котором установлены с возможностью поворота вокруг оси приводные вертикальные щтанги с подхватными лапами, механизм фиксации подхватных лап и установленную с возможностью вертикального перемещения прижимную плиту 1. Однако известный автоматический захват не обеспечивает захват различных по высоте грузов. Цель изобретения - расширение эксплуатационных возможностей путем обеспечения захвата различных по высоте грузов. Данная цель достигается тем, что автоматический захват для штучных грузов, содержащий навешиваемую на крюк грузоподъемного механизма траверсу, кинематически связанный с ней корпус, в котором установлены с возможностью поворота вокруг оси приводные вертикальные щтанги с подхватными лапами, механизм фиксации подхватных лап и установленную с возможностью вертикального перемещения прижимную плиту, снабжен жестко закрепленными на корпусе и коаксиально расположенными относительно вертикальных щтанг направляющими, подвижно установленными на направляющих и жестко соединенными с прижимной плитой упругими втулками, каждая из которых выполнена с продольной прорезью, вертикальными планками, прикрепленными к упругим втулкам вдоль прорезей, установленными на корпусе с возможностью поворота относительно вертикальной оси дополнительными штангами с лысками для взаимодействия с планками втулок и кинематически связанными с дополнительными щтангами кулачками для взаимодействия с боковыми стенками .груза. Такое выполнение автоматического захвата позволяет надежно захватывать различные по высоте грузы. На фиг. I показан автоматический захват, общий вид; на фиг. 2 - сечение А-А на фиг. 1. Автоматический захват для щтучных грузов состоит из корпуса 1 с вертикальными полыми стойками 2 и направляющими 3. В средней части корпуса закреплена пустотелая стойка 4, которая вместе с звездочкой 5, ползуном б, упором 7, жестко прикрепленным к ползуну 6, образует механизм фиксации. Траверса 8, снабженная серьгой 9 для подвески к крюку грузоподъемного механизма, через тяги 10, рычаги 11, закрепленные на валах 12 с коническими шестернями 13, установленными в кронштейнах 14, подвижно соединяется с корпусом 1. Внутри каждой направляющей 3 коаксиально установлены вертикальные штанги 15, на верхних концах которых закреплены конические шестерни 16, а на нижних - подхватные лапы 17. На направляющих 3 с помощью втулок 18 с продольными прорезями установлена прижимная плита 19. Параллельно каждой направляющей 3 в стойке 2 установлены дополнительные щтанги 20 с продольными лысками, взаимодействующие с прикрепленными к упругим втулкам вдоль прорезей вертикальными планками 21 и через поводки 22 с кулачками 23 с верхними и нижними скосами, установленными на осях 24 в нижней части вертикальных стоек 2. Автоматический захват работает следующим образом. На фиг. 1 изображен предлагаемый захват, готовый для захвата щтучного груза. Траверса 8 находится в промежуточно.м положении, механизм фиксации замкнут, кулачки 23 выведены из стоек 2, подхватные лапы 17 развернуты в нерабочее положение. Для подъема груза захват опускают на груз, при этом нижние скосы кулачков 23 служат направляющими. Под действием силы тяжести захвата кулачки 23 разворачиваются относительно осей 24 и через поводки 22 и дополнительные щтанги 20 разжимают планки 21 упругих разрезных втулок 18, обеспечивая вертикальное перемещение прижимной плиты 19. При дальнейшем опускании захвата прижимная плита 19 упирается в верхнюю поверхность груза и совместно с ним продо.)жает перемещение относительно направляющих 3, пока кулачки не окажутся под грузом и своими верхними скосами не отсекут под воздействием сил упругости втулок 18 через дополнительные щтанги 20 и поводки 22 груз определенного по высоте размера. Упругие втулки 18, обжимая направляющие 3, обеспечивают жесткую связь прижимной плиты 19 с корпусом 1 захвата. Таким образом, автоматический захват оказывается лежащим на верхней поверхности груза, а траверса 8 с закрепленным на ней упором 7 при дальнейшем опускании автоматического захвата размыкает механизм фиксации. Когда захват поднимается, корпус 1 с грузом остаются на месте, а траверса 8, перемещаясь вверх, через тяги 10, рычаги 11, валы 12, конические щестерни 13 и 16, вертикальные щтанги 15 разворачивает подхватные лапы 17 в рабочее положение, в зазор под груз. После этого груз вынимается из штабеля или транспортного средства. При укладке груза в штабель он устанавливается на прокладки, траверса 8, продолжая опускаться, через тяги 10, рычаги 11. валы 12, конические шестерни 13 и 16, вертикальные штанги 15 отводит подхватные
лапы 17 в нерабочее положение, выводя их из-под груза, а упором 7, воздействуя на звездочку 5, замыкает механизм фиксации. Таким образом, траверса 8 находится в сцепленном положении с корпусом 1 автоматического захвата, подхватные лапы 17 выведены из-под груза и захват можно снимать.
При подъеме захвата груз разворачивает поводки 22 и через планки 21 и штанги 20 разжимает упругие втулки 18, обеспечивая опускание под собственным весом прижимной плиты 19 в исходное положение.
Такое выполнение автоматического захвата позволяет надежно захватывать различные по высоте грузы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Автоматический захват для штучных грузов | 1976 |
|
SU557035A2 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1970 |
|
SU264650A1 |
| Автоматический захват для штучных грузов | 1974 |
|
SU667482A2 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Траверса для транспортировки иуКлАдКи лиСТОВыХ издЕлий | 1977 |
|
SU821380A1 |
| Грузоподъемная траверса | 1987 |
|
SU1470644A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Захватное устройство для плит | 1986 |
|
SU1393754A1 |
| ВИЛОЧНЫЙ ЗАХВАТ ДЛЯ ПАКЕТИРОВАННЫХ ГРУЗОВ | 1969 |
|
SU233858A1 |
АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ, содержащий навешиваемую на крюк грузоподъемного механизма траверсу, кинематически связанный с ней корпус, в котором установлены с воЗ;можностью поворота вокруг оси приводные вертикальные штанги с подхватными лапами, механизм фиксации подхватных лап и установленную с возможностью вертикального перемешения прижимную плиту, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения захвата различных по высоте грузов, он снабжен жестко закрепленными на корпусе и коаксиально расположенными относительно вертикальных штйнг направляющими, подвижно установленными на направляющих и жестко соединенными с прижимной плитой упругими втулками, каждая из которых выполнена с продольной прорезью, вертикальнымипланками, прикрепленными к упругим втулкам вдоль прорезей, установленными на корпусе с возможностью поворота относительно вертикальной оси дополнительными штангами с лысками для взаимоi действия с планками втулок и кинематически связанными с дополнительными штанга(Л ми кулачка-ми для взаимодействия с боковыми стенками груза. 00 со сх а
19
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU405803A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
