(5) РЕГУЛИРУЕШЙ ЗУБЧАТ О-РЫЧАЖНЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ВЫХОДНОГО ЗВЕНА КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 1993 |
|
RU2066858C1 |
| Кулачково-зубчато-рычажный механизм | 1983 |
|
SU1114833A1 |
| Привод механизма с длительным выстоем выходного звена | 1988 |
|
SU1593772A1 |
| Валковая передача | 1982 |
|
SU1027460A1 |
| Межвалковая трансмиссия двухвальцевой мельницы | 1981 |
|
SU1005894A1 |
| КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ВОСПРОИЗВЕДЕНИЯ ПЕРИОДИЧЕСКОГО ПОВОРОТА | 1992 |
|
RU2057977C1 |
| Кулачково-зубчато-рычажный механизм | 1982 |
|
SU1046556A1 |
| Кулачково-зубчато-рычажный механизм | 1984 |
|
SU1178987A1 |
| УСТРОЙСТВО для ПЕРИОДИЧЕСКОЙ ПОДАЧИ ЛЕНТОЧНОГОМАТЕРИАЛА | 1971 |
|
SU320418A1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
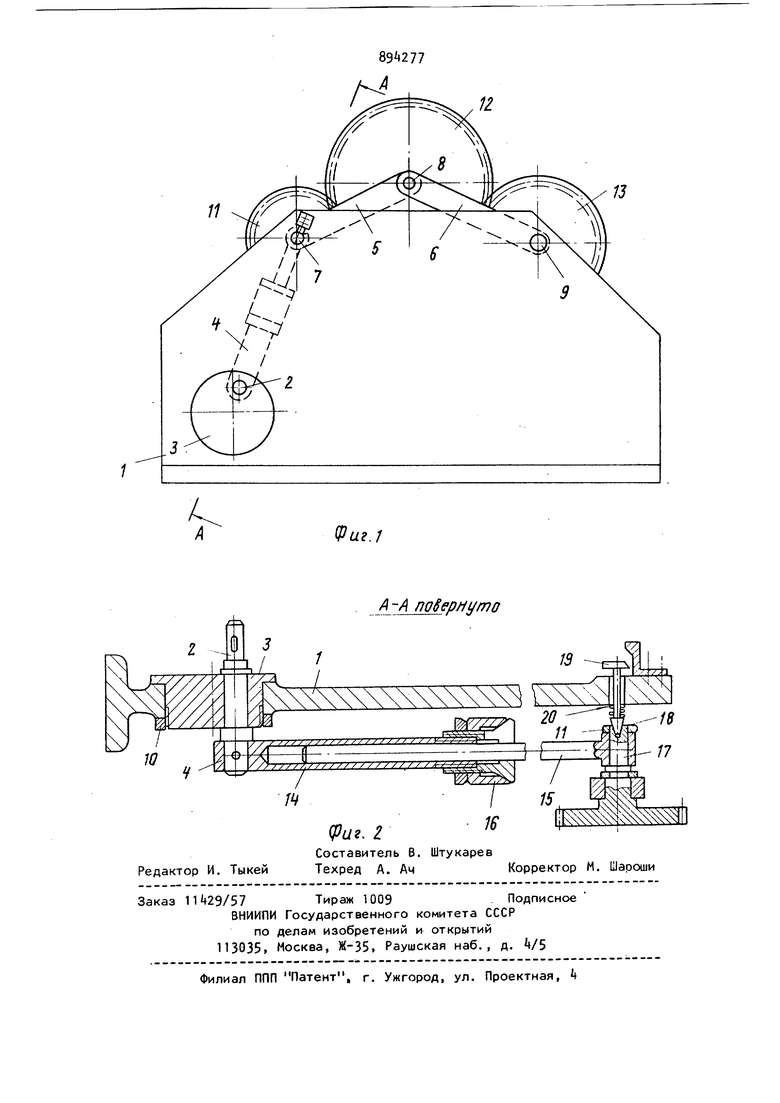
Изобретение относится к машиностроению, а именно к передачам для coo6BteHMfl движения или преобразования его в одной плоскости или параллельно ей с помощью кривощипов, эксцентриков или подовых элементов. Известен регулируемый зубчато-рычажный механизм, содержащий основание, размещенные в нем приводной вал с эксцентриком, базисный шарнирный четырехзвенник, входное звено которо го жестко связано с приводным валом и, взаимодействующие между собой зуб чатые колеса, установленные на шарнирах базового четырехзвенника. Меха низм предназначен для регулирования выстоя выходного звена механизма. Из менение положения эксцентрика относи тельно стойки механизма позволяет изменить длину стойки шарнирного четырехзвенника. Такое регулирование дает возможность изменить выходные характеристики зубчато-рычажного мех низма, в частности, величину угла выстоя С1 . Недостатком известного механизма является то, что он имеет узкие функциональные возможности, обусловленные, тем, что в нем регулируется значение Только одного параметра механизма, что не позволяет, кроме того, получить высокую точность регулирования. Цель изобретения - расширение функциональных возможностей регулируемого зубчато-рычажного механизма и улучшение точности его выходных характеристик путем изменения при регулировке длин двух звеньев базового шарнирного четырехзвенника. Указанная цель достигается тем, что в известном регулируемом зубчаторычажном механизме, содержащем основание, размещенные в нем приводной вал с эксцентриком, базисный шарнирный четырехзвенник; входное звено которого жестко связано с приводным ва3лом, и взаимодействующие между собой зубчатые колеса, установленные на шар нирах базового четырехзвенника, входное звено выполнено в виде телескопического стержня с цанговым зажимом, колесо, установленное на входном зве не связано с последним посредством дополнительного вала с осевым коническим отверстием, а механизм снабжен установленным в основании коническим фиксатором, взаимодействующим с коническим отверстием дополнительного вала и подпружиненным в направлении последнего. На фиг, 1 изображен механизм, общий вид; на фиг. 2 - разрез А-А на фи г. 1 . Регулировочный зубчато-рычажный ме ханизм содержит основание 1,размещенные в нем приводной вал 2 с эксцентри ком 3, базисный шарнирный четырехзвен ник, состоящий из основания 1, выходного звена t, шатуна 5 и коромысла 6, соединенных между собой посредством иарниров 7, 8 и 9, эксцентрик 3 установлен в основании 1 с возможностью поворота и последующей фиксации с по(ощью гайки 10. Вал 2 установлен в эксцентрике 3 с возможностью поворота Входное звено шарнирного четырех звенника жестко связано с приводным залом 2. Механизм содержит взаимодействующие между собой зубчатые колеса 11, 12 и 13, установленные на шарнирах 7, 8 и 9 соответственно. Входное звено выполнено в виде телескопического стержня из двух входящих одна в другую труб 1 и 15 и соединяющего их цангового зажима 16. Колесо 11, установленное на. входном звене k, связано с последним посредством дополнительного вала 17 с осевым коническим отверстием 18, а механизм снабжен установленным в основании 1 конГ-ческим фиксатором 19 взаимодействующим с коническим отверстием 18 дополнительного вала 17 и подпружиненным с помощью пружин 20 в направлении вала 17. Механизм работает следующим образом. Крутящий момент от приводного вала посредством шарнирного четырехзвенника -5-6- и зубчатых колес 11-12 передается к выходному зубчатому колесу 13. Регулирование механизма производит ся следующим образом. 7 Механизм приводится в положение, при котором фиксатор 19 посредством пружины 20 входит в коническое отверстие 18 вала 17. При этом звенья 1, 5 и, 6 образуют жесткую форму. Затем с помощью цангового зажима 16 разъединяют трубы 14 и 15. Отвинчивая гайку 10, эксцентрику 3 сообщается определенный поворот относительно основания 1. При этом изменяются длины основания 1 и входного звена 4 (фиг. 1) шарнирного четырехзвенника. После совершения регулировки положение эксцентрика 3 и длина входного звена k фиксируются с помощью гайки 10 и цангового зажима 16. Использование предлагаемого изобретения расширяет функциональные возможности и, кроме того, повышает точность аппроксимации наперед заданных функций. Формула изобретения Регулируемый зубчато-рычажный механизм, содержащий основание, размещенные в нем приводной вал с эксцентриком, базисный шарнирный четырехзвенник, входное звено которого жестко связано с приводным валом, и взаимодействующие между собой зубчатые колеса, установленные на шарнирах базового четырехзвенника, отличающийся тем, что, с целью расширения функциональных возможностей и улучшения точности выходных характеристик механизма, входное звено вы полнено в виде телескопического стержня с цанговым зажимом, колесо, установленное на входном звене, связано с последним посредством дополнительного вала с осевым койическим отверстием, а механизм снабжен установленным в основании коническим фиксатором, взаимодействующим с коническим отверстием дополнительного вала и подпружиненным в направлении последнего. Источники информации, принятые во внимание при экспертизе 1. Нахапетян Е.Г. Динамические характеристики зубчато-рычажных, кулачково-зубчато-рычажных и кулачковопланетарных.механизмов с остановкой. Механика лашин. 1973 вып, 42, с. 63 66 (прототип)
