(54) АВТОМАТ ДЛЯ СОРТИРОВКИ ИЗДЕЛИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сортировки изделий | 1981 |
|
SU1042823A1 |
| Автомат для сортировки изделий | 1983 |
|
SU1158253A1 |
| Устройство для контроля и сортировки изделий | 1987 |
|
SU1461538A2 |
| Устройство для контроля и сортировки изделий | 1984 |
|
SU1224021A1 |
| Устройство для контроля и сортировки уплотнительных колец | 1986 |
|
SU1359008A1 |
| АВТОМАТ ДЛЯ ИЗМЕРЕНИЯ И СОРТИРОВКИ ДЕТАЛЕЙ | 1938 |
|
SU57760A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1976 |
|
SU698684A1 |
| Автомат для сортировки подшипников качения по моменту сопротивления вращению | 1989 |
|
SU1686329A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Автомат для контроля и сортировкигНЕзд шТЕпСЕльНыХ РАз'ЕМОВ | 1979 |
|
SU820912A1 |
Изобретение относится к области контроля и многопозиционной сортировки изделий в радиопромышленности и электронной промышленности.
Известен автомат для сортировки изделий, содержащий смонтированное на станине с гнездом загрузочное устройство с приводам и контрольно-измерительным блоком 1 .
Недостаток известного устройства в том, что его производительность низка.
Наиболее близким к предлагаемому по своей технической сути является автомат для сортировки изделий, содержаш,ий смонтированные на станине с гнездом загрузочное устройство с приводом, контрольноизмерительный блок, блок управления и распределительное устройство, состояш,ее из поворотной трубки, рычагов и толкателей с электромагнитами 2.
Недостаток известного устройства в том, что мала его производительность и надежность из-за неплотного прилегания пружин.
Целью изобретения является повышение производительности.
Указанная цель достигается тем, что в известном автомате для сортировки издеЛИИ, содержаще.м смонтированные на станине с гнездом загрузочное устройство с приводом, контрольно-измерительный блок, блок управления и распределительное устройство, состоящее из поворотной трубки, рычагов и толкателей с электромагнитами, он снабжен датчиком обратной связи, размещенны.м на конце поворотной трубки, вход которого присоединен к выходу блока управления, выход - к входу блока управления, при этом к выходу блока управления параллельно присоединены привод загрузочного устройства, контрольно-измерительный блок и электро.магниты толкателей поворотной трубки, заходная часть которой выполнена в виде подпружиненного фланца со сферической опорой, установленной в гнезде станины и закрепленной посредством кольца фиксации.
Кроме того, фланец поворотной трубки имеет наклонные пазы и подпружинен посредством плоских пружин, равномерно размещенных по окружности кольца фиксации под ним. Гнездо станины выполнено коническим, а толкатели поворотной трубки подпружинены и имеют ловители, выполненные в виде призм.
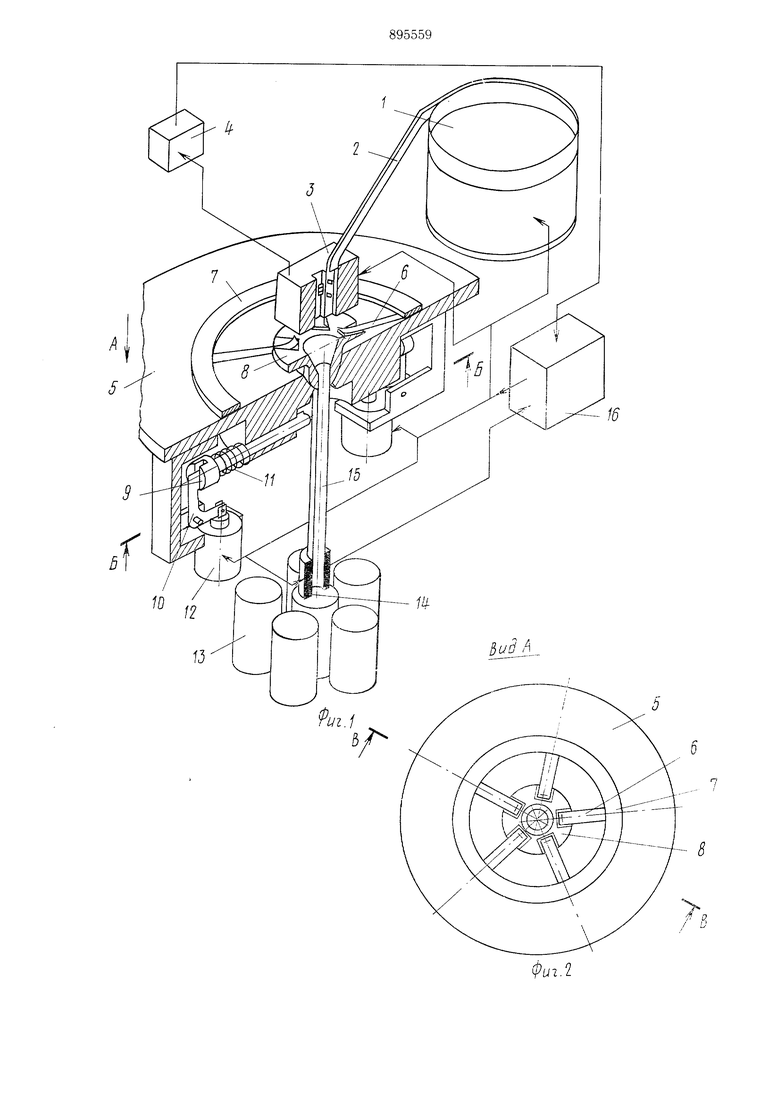
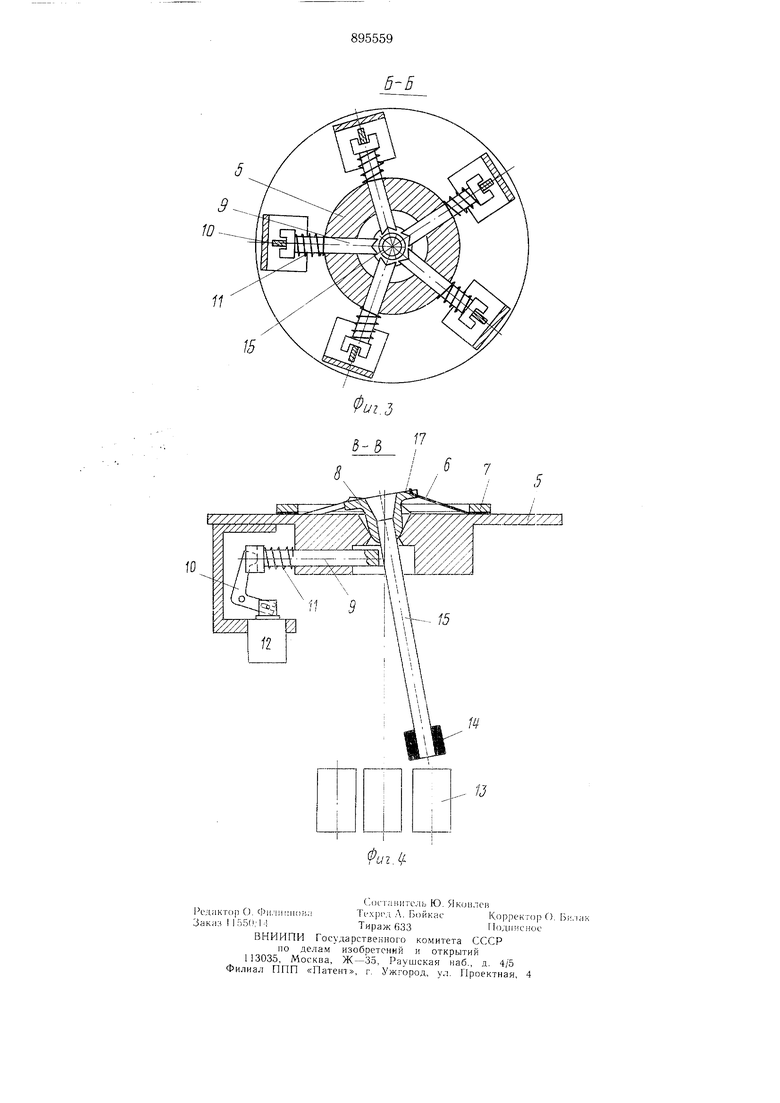
На фиг. 1 изображен автомат сортировки с разрезом по оси распределительного устройства при выключенных электромагнитах; на фиг. 2 - вид по стрелке Л; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 2.
Автомат содержит загрузочное устройство с вибробункером и с приводом 1, направляющий лоток 2, механизм контактирования 3, измеритель 4, корпус распределительного устройства с коническим гнездом 5, пружины плоские 6, прижимное кольцо 7, фланец со сферической опорой 8; толкатели 9, рычаги 10; пружины 11, электромагниты 12, тары 13, датчик 14, поворотную подвижную трубку 15, блок управления 16 и наклонные пазы 17 на фланце 8.
Автомат работает следующим образом.
Изделия загружаются в вибробункер 1, КЗ которого по направляющему лотку 2 в ориентированном состоянии поступают в механизм контактирования 3, где поочередно подключаются к входному каналу измерителя 4. Измеритель 4 производит замер параметров изделий, определяет их классификационную группу и подает сигнал в блок управле ия 6, из которого в зависимости от результатов измерений подается питание определенному электромагниту 12. При этом рычаг 10 посредством толкателя 9 отклоняет трубку 15 к определенной таре 13. Иоложение трубки 15 фиксируется при помощи имеющегося на конце толкателя 9 ловителя. i:aripH,iep призмы. Второй сигнал из блока у ;равления 16 подается на механизм контактирования 3 для смены изделия на позиции измерения. Проверенное изделие освоб:)ждается и выпадает н юворотную трубку 15, а на его место становится следующее. .Датчик 14, напри.мер емкостной кли фотоэлектрический, фиксирует прохождение из/гелия и подает сигнал в блок управления 16 для отключения электромагнита. Пружина 11 возвращает толкатель в исходное положение. Пружины 6 возвращают освобожденную поворотную трубку 15 в исходное положение. В дальнейщем срабатывание .механизма контактировани.ч 3 производится по совокупности сигналов из из.мерителя 4 и датчика 14.
Каждая из тар 13 соответствует одной из классификационных rpyrni. Тары 13 располагаются ио диаметру окружности, определяемой углом наклона поворотной трубки 15. Одна тара 13 устанавливается в центре этой окружности при исходном ноложении трубки 15. В этом случае питание на электромаг цпъ1 не подается.
При.менение данного автомата повыщает надежность за счет простоты конструкции
и повыщения точности координации поворотной распределительной трубки 15 во всех рабочих положениях, что обуславливается равномерным расположение.м по окружности пружин 6, поджимающих фланец 8 трубки,
и точностью осевой ориентации трубки ловителями толкателей 9. Срабатывание датчика 14 на выходном конце трубки 15 свидетельствует о выполнении рабочего цикла и служит, таким образом, как средство самоконтроля автомата.
Такое конструктивное рещение автомата для сортировки изделий существенно повыщает его производительность.
Формула изобретения
0 3. Автомат по пп. 1 и 2, отличающийся тем, что гнездо станины выполнено конически.м.
в виде призм.
Источники инфор.мации, принятые во внимание при экспертизе
процессов в мащиностроении и приборостроении. Киев, 1961, с. 477, рис. 324.
