Изобретение относится к машиностроению, в частности к ловителям для грузоподъемных механизмов и может быть использовано в других отраслях народного хозяйства.
Цель изобретения - повышение надежности работы устройства.
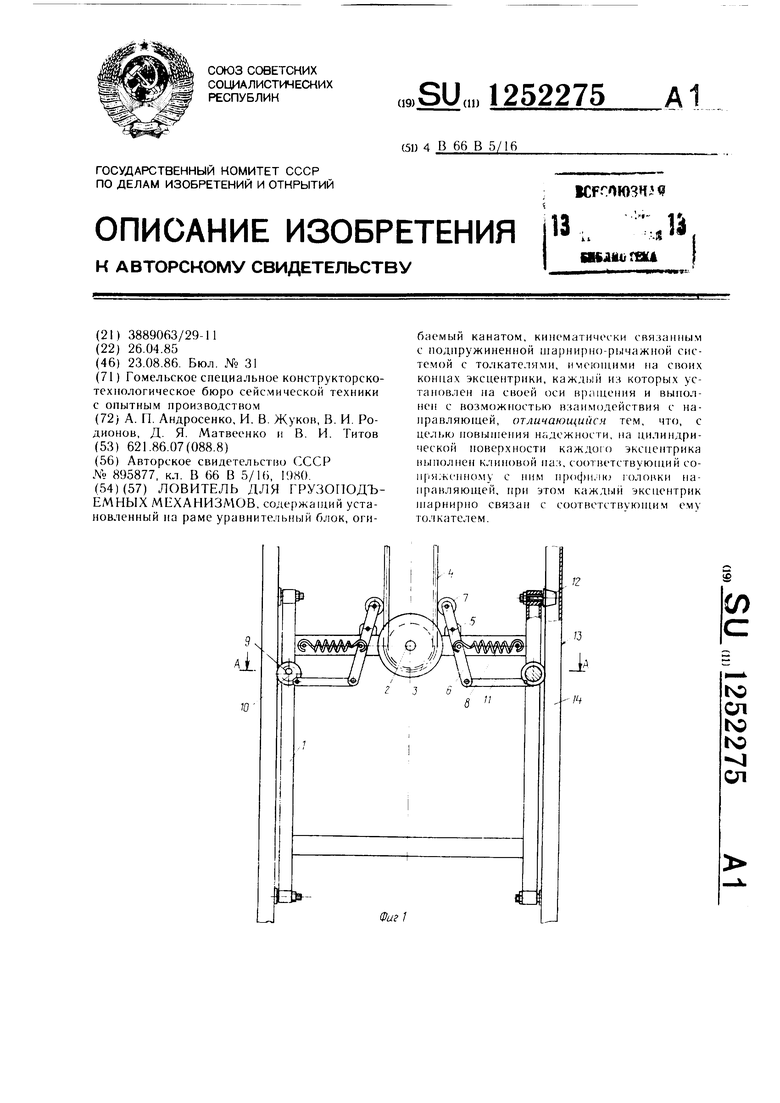
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - сечение А - А на фиг. 1; на фиг. 3 - сечение Б - Б на фиг. 2.
нижние положения, обеспечивая необходимый зазор между боковыми поверхностями 16 и 17 Ю1ИНОВЫХ пазов 15 и клиновыми частями 18 головок 14 направляющих 13. В этом случае рама 1 имеет возможность свободного вертикального перемещения в направляющих 13. Ролики 12 удерживают раму 1 в направляющих- 13.
В момент ослабления или разрыва тягового каната 4 рама I стремится опусЛовитель для грузоподъемных механиз- ю титься по вертикальным направляющим 13,
20
мов содержит сварную раму 1, на оси 2 которой установлен уравнительный блок 3, огибаемый гибким канатом 4. На осях 5 рамы 1 смонтированы подпружиненные двуплечие рычаги 6, имеющие ролики 7, постоянно вза- имодействуюпхие с канатом 4 и посредством 5 пружин 8 соединенных с рамой 1. В раме 1 на осях 9 свободно установлены эксцентрики 10, Н1арнирно соединенные с толкателями 11, которые, в свою очередь, шарнирно связаны с двуплечими рычагами 6. Рама 1 снабжена роликами 12, установленными в направляющих 13, выполненных с головками 14. На цилиндрической поверхности каждого эксцентрика 10 выполнен клиновой паз 15 с боковыми поверхностями 16 и 17. Головка 14 направляющей 13 имеет клиновую часть 18, 25 форма которой соогветствует форме клинового паза 15.
Устройство работает следующим образом.
Под действием пружин 8 ролики 7 постоянно прижаты к тяговому канату 4, при этом толкатель 1 1 занимает положение, при котором эксцентрики 10 занимают крайние
30
а пружины 8 поворачивают двуплечие рычаги 6 на своих осях. При этом толкатели 11 также поворачивают на осях 9 эксцентрики 10. При повороте последние своим клиновым пазом 15, эксцентрично расположенным относительно оси 9, взаимодействует с клиновой частью 18 головок 14 направляющих 13, при этом боковые поверхности 16 и 17 клинового паза 15 вступают в контакт с клиновой частью 18. Под действием фрикционных сил и благодаря клиновому действию обеспечивается повыщенное сцепление и происходит заклинивание эксцентриков 10 на головках 14 направляющих 13 и, следовательно, остановка рамы 1 на том участке направляющих 13, где происходит разрыв или ослабление тягового каната 4.
При натяжении тягового каната 4 происходит поворот двуплечих рычагов 6 в противоположную сторону и через толкатели II отвод эксцентриков 10 от головок 14 направляющих 13 с одновременным подъемом рамы 1 вверх, при этом рама 1 подъемника устанавливается в исходное положение.
нижние положения, обеспечивая необходимый зазор между боковыми поверхностями 16 и 17 Ю1ИНОВЫХ пазов 15 и клиновыми частями 18 головок 14 направляющих 13. В этом случае рама 1 имеет возможность свободного вертикального перемещения в направляющих 13. Ролики 12 удерживают раму 1 в направляющих- 13.
В момент ослабления или разрыва тягового каната 4 рама I стремится опус титься по вертикальным направляющим 13,
а пружины 8 поворачивают двуплечие рычаги 6 на своих осях. При этом толкатели 11 также поворачивают на осях 9 эксцентрики 10. При повороте последние своим клиновым пазом 15, эксцентрично расположенным относительно оси 9, взаимодействует с клиновой частью 18 головок 14 направляющих 13, при этом боковые поверхности 16 и 17 клинового паза 15 вступают в контакт с клиновой частью 18. Под действием фрикционных сил и благодаря клиновому действию обеспечивается повыщенное сцепление и происходит заклинивание эксцентриков 10 на головках 14 направляющих 13 и, следовательно, остановка рамы 1 на том участке направляющих 13, где происходит разрыв или ослабление тягового каната 4.
При натяжении тягового каната 4 происходит поворот двуплечих рычагов 6 в противоположную сторону и через толкатели II отвод эксцентриков 10 от головок 14 направляющих 13 с одновременным подъемом рамы 1 вверх, при этом рама 1 подъемника устанавливается в исходное положение.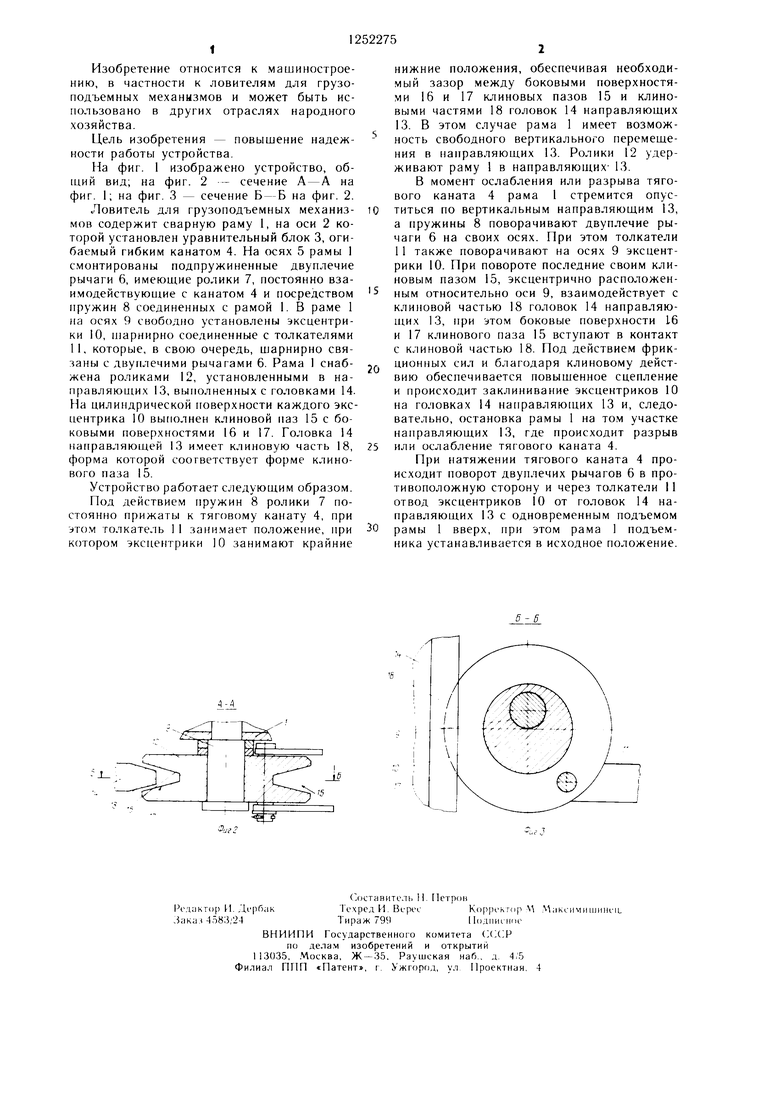
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОВИТЕЛЬ ДЛЯ ГРУЗОВОГО ПОДЪЕМНИКА | 2013 |
|
RU2526315C1 |
| Эксцентриковый ловитель для грузоподъемных механизмов | 1980 |
|
SU895877A1 |
| ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2329940C2 |
| Грузовая тележка подвесной канатной дороги | 1958 |
|
SU116805A2 |
| Штамп для резки сортового проката | 1980 |
|
SU933306A1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ЛЕСОМАТЕРИАЛОВ | 1995 |
|
RU2092305C1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| Тормозное устройство, действующее при обрыве тягового каната | 1940 |
|
SU58719A1 |
| ПОДЪЕМНИК ДЛЯ ПЕРЕМЕЩЕНИЯ ВНУТРИ ВЕРТИКАЛЬНО УСТАНОВЛЕННОГО ОБЪЕКТА | 1992 |
|
RU2026252C1 |
| Установка для сборки и сварки обечаек из сегментов | 1988 |
|
SU1816255A3 |
Л
Pe. uiKT)() И. Дирбак Зака.1 4583;24
( оставитель И. Пстрои
Техред И. ЕВ -ресКорректор М MHKCHVI
Тираж 799I lojinni. иис
ВНИИПИ Государственного комитета ((
по делам изобретений и открытий
Филиал ПГ1П «Патент, г. Ужгород, ул Проектная, 4
| Эксцентриковый ловитель для грузоподъемных механизмов | 1980 |
|
SU895877A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
