(54)СИНХРОНИЗАТОР ДВИЖЕНИЯ ГИБКОГО ЭЛЕМЕНТА И ВРАЩЕНИЯ ПРИВОДА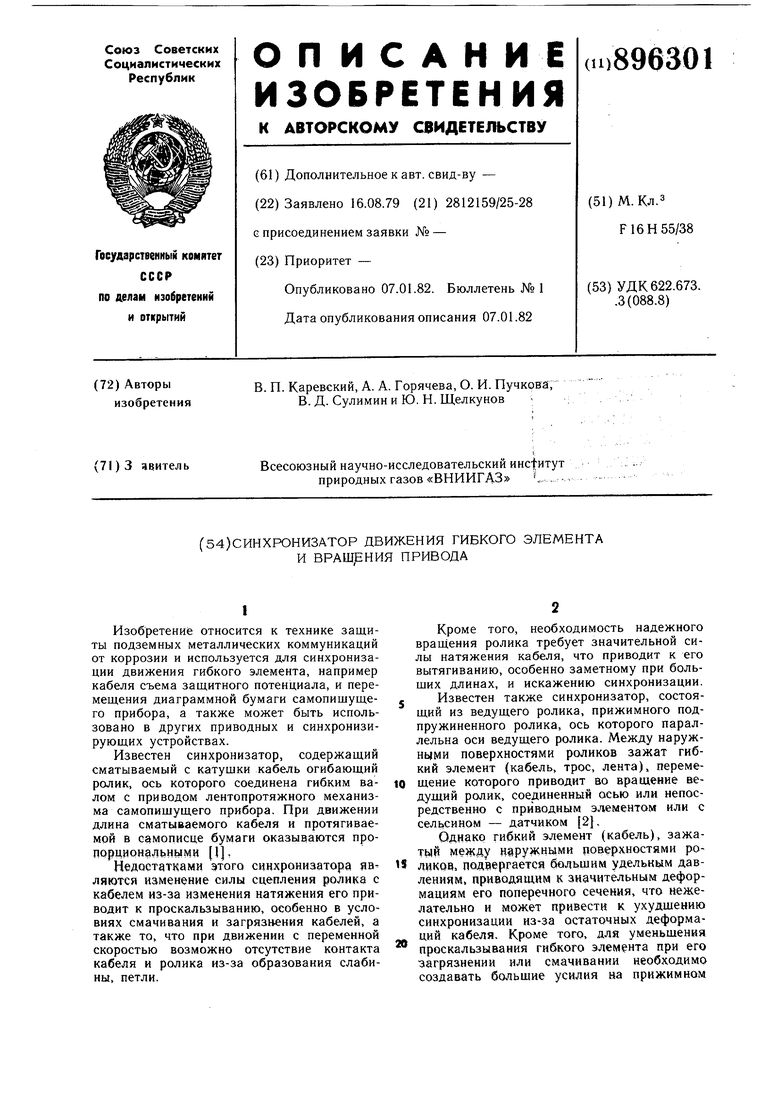

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для намотки и повторной выдачи гибкого длинномерного материала | 1989 |
|
SU1773254A3 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| ПРИВОД ВРАЩЕНИЯ МАШИНКИ ДЛЯ НАВИВКИ ВОЛОКОННО-ОПТИЧЕСКОГО КАБЕЛЯ | 2017 |
|
RU2662245C1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ И/ИЛИ РАЗМАТЫВАНИЯ ГИБКОГО ДЛИННОМЕРНОГО МАТЕРИАЛА С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ НАМОТКИ ИЛИ РАЗМАТЫВАНИЯ | 1992 |
|
RU2015764C1 |
| Лентопротяжное устройство | 1975 |
|
SU546838A1 |
| УСТРОЙСТВО НАТЯЖЕНИЯ КАБЕЛЯ (ВАРИАНТЫ) | 2016 |
|
RU2621668C1 |
| СТЕНД ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ВИНТОВЫХ ГЕРОТОРНЫХ ДВИГАТЕЛЕЙ, ТУРБОБУРОВ И ЯСОВ | 2008 |
|
RU2369716C1 |
| Вакуумная электропечь | 1972 |
|
SU442239A1 |
| Устройство для прошивки ферритовых сердечников | 1983 |
|
SU1226525A1 |
| КАБЕЛЬНЫЙ БАРАБАН ДЛЯ НАМОТКИ-РАЗМОТКИ СИЛОВОГО КАБЕЛЯ | 2024 |
|
RU2835173C1 |
1
Изобретение относится к технике защиты подземных металлических коммуникаций от коррозии и используется для синхронизации движения гибкого элемента, например кабеля съема защитного потенциала, и перемещения диаграммной бумаги самопишущего прибора, а также может быть использовано в других приводных и синхронизирующих устройствах.
Известен синхронизатор, содержащий сматываемый с катушки кабель огибающий ролик, ось которого соединена гибким ва лом с приводом лентопротяжного механизма самопишущего прибора. При движении длина сматываемого кабеля и протягиваемой в самописце бумаги оказываются пропорционэльнымн I,
Недостатками этого синхронизатора яв ляются изменение силы сцепления ролика с кабелем из-за изменения натяжения его приводит к проскальзыванию, особенно в условиях смачивания и загрязнения кабелей, а также то, что при движении с переменной скоростью возможно отсутствие контакта кабеля и ролика из-за образования слабины, петли.
Кроме того, необходимость надежного вращения ролика требует значительной силы натяжения кабеля, что приводит к его вытягиванию, особенно заметному при больших длинах, и искажению синхронизации.
Известен также синхронизатор, состоящий из ведущего ролика, прижимного подпружиненного ролика, ось которого параллельна оси ведущего ролика. Между наружными поверхностями роликов зажат гибкий элемент (кабель, трос, лента), перемещение которого приводит во вращение ведущий ролик, соединенный осью или непосредственно с приводным элементом или с сельсином - датчиком 2}.
Однако гибкий элемент (кабель), зажатый между наружными поверхностями роS ликов, подвергается большим удельным давлениям, приводящим к значительным деформациям его поперечного сечения, что нежелательно и может привести к ухудшению синхронизации из-за остаточных деформаций кабеля. Кроме того, для уменьшения проскальзывания гибкого элемента при его загрязнении или смачивании необходимо создавать большие усилия на прижимном
ролике или устанавливать несколько прижимных роликов, что делает конструкцию громоздкой и ненадежной.
Наиболее близким к изобретению по технической сущности и достигаемому результату является синхронизатор движения гибкого э темента и вращения привода, включающий установленные на подщипниковых опорах два ролика, на торцевых поверхностях которых выполнены ребра, образующие сопряженные непрерывные волнообразные поверхности 3.
Однако наличие разделенных пазами ребер, взаимодействующих с гибким элементом, создает при работе значительные местные деформации гибкого элемента и ударные нагрузки на него, что приводит к его износу и проскальзыванию. Для стабилизации работы имеется сложная система траверс, помещенных в фигурные пазы и поддерживающих постоянной силу взаимодействия роликов и гибкого элемента, а также два эксцентрика, которые регулируют силу нажатия роликов на гибкий элемент. Система обеспечения работы роликов и гибкого элемента конструктивно сложна и ненадежна в работе ввиду взаимодействия элементов, обеспечивающих работу устройства (траверсы, эксцентрики), одновременно с несколькими деталями.
Цель изобретения - повыщекие точности синхронизации за счет уменьшения проскальзывания гибкого элемента.
Указанная цель достигается тем, что синхронизатор снабжен упором, ограничивающим осевое перемещение одного из роликов и тормозом, взаимодействующим на этот же ролик.
На фиг. 1 показан синхронизатор, разрез; на фиг. 2 - вид А на.фиг. 1; на фиг. 3 - вариант конструкции синхронизатора.
Синхронизатор (фиг. 1) состоит из ролика 1, жестко закрепленного на валу 2, и ролика 3, имеющего возможность вращения и осевого передвижения на валу 2 до упора 4. Вал 2 присоединен к синхронизируемому или приводимому устройству. На торцах роликов выполнены ребра, образующие волнообразные поверхности (фиг. 2), между которыми находится гибкий элемент 5. Волнообразные сопряженные поверхности роликов могут быть выполнены в виде комбинации цилиндрических, конических поверхностей и плоскостей или другим образом. Вал 2 установлен в подшипниках 6, которые расположены в корпусе 7. Тормоз 8, жестко связанный с корпусом 7, воздействует на ролик 3.
На фиг. 3 изображена конструкция с нееоосным расположением подщипниковых опор роликов, позволяющая устанавливать необходимую силу сцепления роликов с гибким элементом путем изменения угла между роликами.
Синхронизатор работает следующим образом.
При движении гибкого элемента 5 за счет тормозного момента, приложенного на ролике 3, и рабочего момента на ролике 1 происходит зажатие его на значительной протяженности осевой силой, возникающей на волнообразных поверхностях. Возникающая тангенциальная сила трения поворачивает без проскальзывания кабеля ролик 1, который соединен с синхронизируемым или приводным устройством. Изменяя угол охвата от нуля в сторону увеличения, можно в значительной степени изменять сцепление кабеля с роликами. Угол охвата можно регулировать (фиг. 3) путем изменения угла между осями роликов. Сила сцепления регулируется изменением тор.мозного момента пружиной тормоза.
Возможность широкого диапазона регулирования силы сцепления кабеля роликами за счет наличия волнообразных поверхностей в месте кабеля позволяет осуществить точность и надежность синхронизации.
Работа синхронизатора может быть обратимой. В этом случае .момент прилагается к ролику и осуществляется протяжка гибкого элемента (кабеля, ленты).
Предлагаемый синхронизатор применен в блоке регистрации потенциала .методом выносного электрода. Блок состоит из рамы, на которой закреплены катушка с кабелем длиною 1000 м, синхронизатор и регистратор каротажный. Блок устанавливают на трассе газопровода вблизи катодного вывода, к которому подсоединяют кабель от катушки. К положительной клемме регистратора подсоединяют провод от катящегося электрода, к отрицательной - провод токосъемника катушки.
При движении по трассе кабель сматывается с катушки, проходит через синхронизатор, связанный гибким валом с приводом протяжки диаграммной ленты, в результате чего получают диаграмму разности потенциалов «труба-зе.мля в функции расстояния.
Формула изобретения
Синхронизатор движения гибкого элемента и вращения привода, включающий установленные на подщипниковых опорах два ролика, на торцовых поверхностях которых выполнены ребра, образующие сопряженные непрерывные волнообразные поверхности, отличающийся тем, что, с целью повышения точности синхронизации, за счет уменьщения проскальзывания гибкого элемента, синхронизатор снабжен упором, ограничивающим осевое перемещение одного из роликов, и тормозом, воздействующим на этот же ролик.
