I
Изобретение относится к устройствам для регулирования частоты статических преобразователей асинхронного тягового привода, применяемых на электроподвижном составе.
Известно устройство для регулирования частоты асинхронного тягового электродвигателя, питающегося от статического преобразователя с системой управления, содержащее датчик частоты вращения ротора электродвигателя, соединенный выходом с входом одного из дискретно-аналоговых преобразователей и с одним из входов блока выделения разностной частоты, выход которого подключен к входу другого дискретно-аналогового преобразователя, соединенного входом с одним из входов сумматора, другой вход которого подключен к задатчику скольжения, интегратор, соединенный выходом с входом зад,ающего генератора I.
Однако при длительном боксовании или юзе в известном устройстве несмотря на определенную инерционность устройства частота питания статора двигателя изменяется, т. с. не обеспечивается работа двигателя на естественной жесткой характеристике.
Цель изобретения - повыщение тяговых свойств устройства путем повыщения противобоксовочных свойств асинхронного тягового электродвигателя.
Поставленная цель достигается тем, что устройство снабжено датчиком боксования, 5 ключом и дифференцирующим усилителем, соединенным входом с выходом первого дискретно-аналогового преобразователя, а выходом - с третьим входом сумматора, выход которого соединен с одним из входов ключа, подключенного другим входом к датчику боксования, а выход - к входу интегратора, при этом выход задающего генератора соединен с другим входом блока выделения разностной частоты.
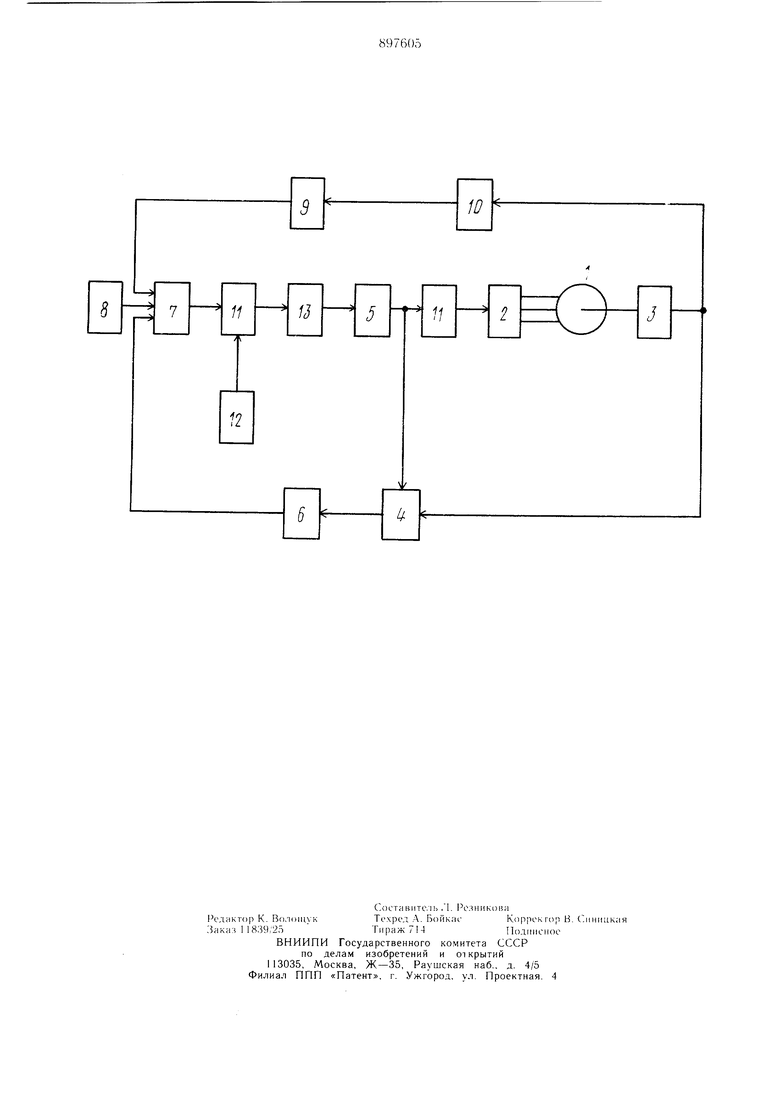
На чертеже приведена блок-схема предложенного устройства.
Тяговый двигатель 1 питается от статического преобразователя 2. На валу двигателя 1 установлен датчик 3 частоты вращения ротора электродвигателя, соединенный с входом блока 4 выделения разностной частоты, другой вход которого соединен с задающим генератором 5, а выход через дискретно-аналоговый преобразователь 6 с одним из входов сумматора 7, другие вх()Л1)1 KOTOpoio соединены с за;иг1чик(;м 8 ск();1ьжеиия и чере; диффере1 1и1)ук)|ций ус11.1ите.11 9 и аналоговый нреобразовате.11 К) с датчиком 3 частот, ipaiuenMH ротора э.кжтродвигате.ти, а В)1ход через II, соединенный с датчиком 12 боксо вания, с нте1ратором 13, ()дк.(,м к задающему генера Ч)ру 5. В устройстве разност ая частота , одученная с и,Х()да б.аока 4 Н,1де, )азностной частот -), нреобразо $а ная i ,ioгову о форму в диекрет(),ло овом )еобразователе 6, ек. в сумматоре 7 с от задатч 1ка 8 усгаик и через 11 остунае - ia вход ) К). Частота задак)) енератора 5, ()реде.1яе.мая величиной напряжения и)()ра 13, 1одаетея на с атпческнм ()б)азовате: ем. По этому онтуру оеу|цеетв; яется аста Ч ческое ре у,т( () от.; оне 1июразиинс дейстните; ой и зада1 1ой велич) абс().() с().т,. Регулирование io озму цени1очаето- -е вра цения ротора , о ко туру, (яцему дискретно-а а,то Ч)В и 1 реобразова ель 10, в котором .i е да -чика 3 частот, 1) э. ек -родви ателя реобразуе7ся i сшалсяовую форму через диффере 1ЦИ) , Ь одается на сумматор 7. )и уета 0 1 ейся скорост 1 ,еетв. яетея ,; 1рова 1ие О отк., чем М,е()КаЯ , , абсОЛ 0- ) ,. При 1змеиении cKopociH движе 1и контур )егу. 1рования о возму1 1ен -1К) умен,1ает фемя 1ереход 10 -о роцееса, у. свойства )е уЛЯТОра. 1ри ОТСуТеТВ бг)КС()Ва)Я i. юза с 12 боксо а 1 1я юза не НОСТу 1аеТ , 9 . П) iO3НИКНОВе1 ИИ боКСОВаИ -|Я Л юза с датчика 12 боксования и оза ()аз,кае ключ 9. }а) на Е,ходе )атора 13 сох)а яется неизме 1,м и ,1м его к момент ачала бокеова 1ия. При чтом, в времени боксования частота ia в,Х()де зада О1цего -е 1ератора 5 сохра яется 1еизменной. Таким образом, бокеова 1ие к)з ко. есной арь ie 1рив()дят к у еличе - Ю чаетот т(жа статора, 1ри cp,ie двигате.мь работает жестк(;й гяговой характеристике. При этом ток и М( ДВ 1гателя резко Г адают, колес ая иа)а б,ст)о восстанавливает i ава) режимь в 1реобразова1ч ле ус енают развиться. ЭлеМС , С.ЧеМ, б,, i, НО.П С, с..м o6)a.. )фереН и руклц 1Й ус,,1, 9 I )HiiMpaTop 13 ia (. )a.,X уСИ Л .-(,ч1. Ь,ОК 4 15, Де.1еНИ Я раз 10СТ1 ой чае1-оть ia оснсже RS-триггс)а э. 111:-ПЛП, ключ .) 7 |)а i3i CTopa. в качестве да -чика 12 боксова 1ия i юза ожет б,ть иснол,зова(, , датчик ос( ia эф())екте Л((ч;а, i котором срав(И аетСЯ скорое , К(),(, lap,l C(J СКОрОСТ,0 1 ОСТу11а е.,НОГ(1 Д) ЧКИПе о.,. ред,).: строй С на -j,TCKTpoi«)3a. и те1,1ов()зах 1(). 1яет io,, ИХ )o6oKe()i( 1,е свойства, , ) )H,X (.)В,Х ; ек родвига елей боксовани и ()зе fa (ой харак ер ст Ке, 0:-Л ОЛЯе у К ИЧИ1, iUC()i,e (0|П,1 1ОеЗДОВ. а акже 1усков,е ycкo|)e, , раз1 1 ст1 ое 6oKco ia ie и 1)азв1Г .ис юза. ет() д,1я ре Л 1рова1 ия -la TCT.f, а )(){) О iO О j. рОД1И1 а Ге.1Я. 1Г а о цегося от с а 1ческ(ич) ipe(j6pa3().1Я с е 1Сгемой ун)а),. соде1)жа 11е1да Ч 1к частот 1 -(ра.ения poTOfia э. ектроД аГе., СЧ)еД(,Й (П1 С ВХОДОМ 3 К) 1 а ЛОГОВЫ X lpl()6)a iOВаГ1, 1 с из ХОДОВ б,()Ка ii,.le. раЗП(К )ОЙ часто ,, ВЫХОД KOJ((; ПОДКЛ ОЧеН к iXO.l Д {СКре1 110-аНа,()) )азова еля, coe. BX(jДОМ с H:S ХОДОН С .Ма());;, . ХОД КО ()рОГО ЮДК,, ЮЧС К ЗаДа Ч 1К CKO.l,, )аТО), СОСДИ Н(Ч1 .Н ,| И В.ЫХОД(;М с входом ене)атора, (иличиющсес.ч , ч1о, с ue.,o о(, адеж ое 1, ) снабже И) (.1М бокеова1 ия, .Ч и ДИ()к}) уС,., ,М ВХОДОМ С В,ХОДОМ Д Скрст 1о-а а.)о рсобразовате; я, а и,ходо.чс т)ет,м ходом С , ,ход (jporo с ИЗ входов К.Т)Ча, 1ОДК.:|ЮЧе 1НО О ) НХОДСХМ к да чику боксования, а ,Х()Дк входх интегратора, при в,ход задаю1ие о ге ератора с .ij) ixoд(JM б.юка . (U-i частот,. ПСТ() (})f)pMaiUU, 1),е ВО i 1 .М а .Че Н)И ЭКС ерТИЗС I. 111))(И ДЬ 447331. кл. 21 с 59/10, 1908.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система измерения уровня | 1986 |
|
SU1515063A1 |
| Устройство для защиты от боксования и юза тепловоза | 1982 |
|
SU1011407A1 |
| Вентильный электродвигатель | 1987 |
|
SU1415347A2 |
| Устройство задержки | 1980 |
|
SU902214A1 |
| Устройство синхронной связи к зубообрабатывающему станку, работающему по методу обката | 1986 |
|
SU1392545A1 |
| Устройство для программного управления технологическим оборудованием | 1985 |
|
SU1325407A1 |
| Система автоматической корректировки положения рабочих органов машины для междурядной обработки всходов растений | 1985 |
|
SU1412612A2 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| Устройство для управления многодвигательным приводом | 1978 |
|
SU1310992A1 |
| Устройство для автоматического управления совокупностью объектов | 1972 |
|
SU481039A1 |