(54) КАНТОВАТЕЛЬ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНТОВАТЕЛЬ-МАНИПУЛЯТОР | 1991 |
|
RU2063372C1 |
| Кантователь крупногабаритных изделий | 1986 |
|
SU1447626A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Кантователь грузов | 1979 |
|
SU840019A2 |
| Кантователь | 1979 |
|
SU870308A1 |
| КАНТОВАТЕЛЬ | 2009 |
|
RU2392216C1 |
| Захват-кантователь | 1982 |
|
SU1025645A1 |
| Кантователь для установки корпусов судов под сварку | 1986 |
|
SU1388244A2 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
I
Изобретение относится к грузозахватным средствам, в частности, к кантователям, предназначенным для кантования в вертикальной плоскости крупногабаритных и тяжелых грузов, требующих осторожного обращения с ними при проведении операции кантования, для технологических операций.
Известен кантователь листов, содержащий поворотную вокруг горизонтальной оси раму, состоящую из рычагов, соединенных между собой ложементом для поддерживания груза, а одни из концов упо.мянутых рычагов снабжены захватными вилками под цапфы, кантуемого груза 1.
Однако известный кантователь не обеспечивает надежности удержания груза в осевом направлении, а функциональные возможности его ограничены.
Цель изобретения - повыщение производительности путем обеспечения возможности вертикальной установки груза на кантователь без последующего крепления его на раме.
Поставленная цель достигается тем, что ложемент смонтирован ниже захватных вилок, перпендикулярно продольной оси рычагов.
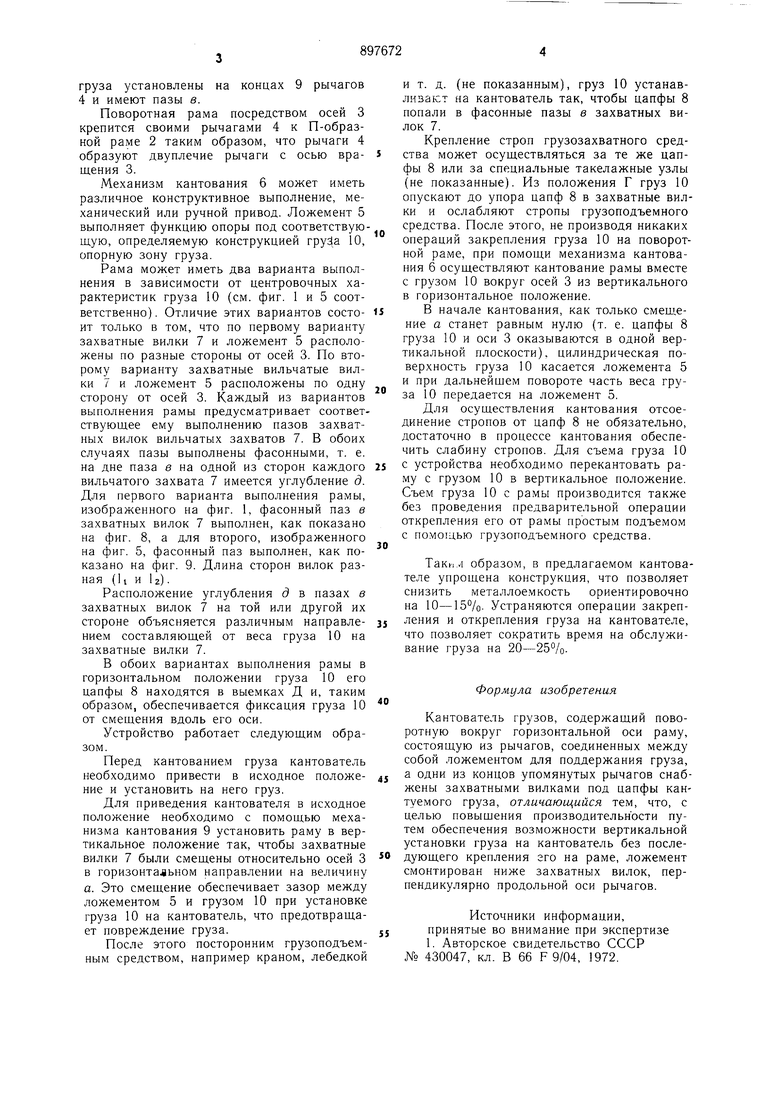
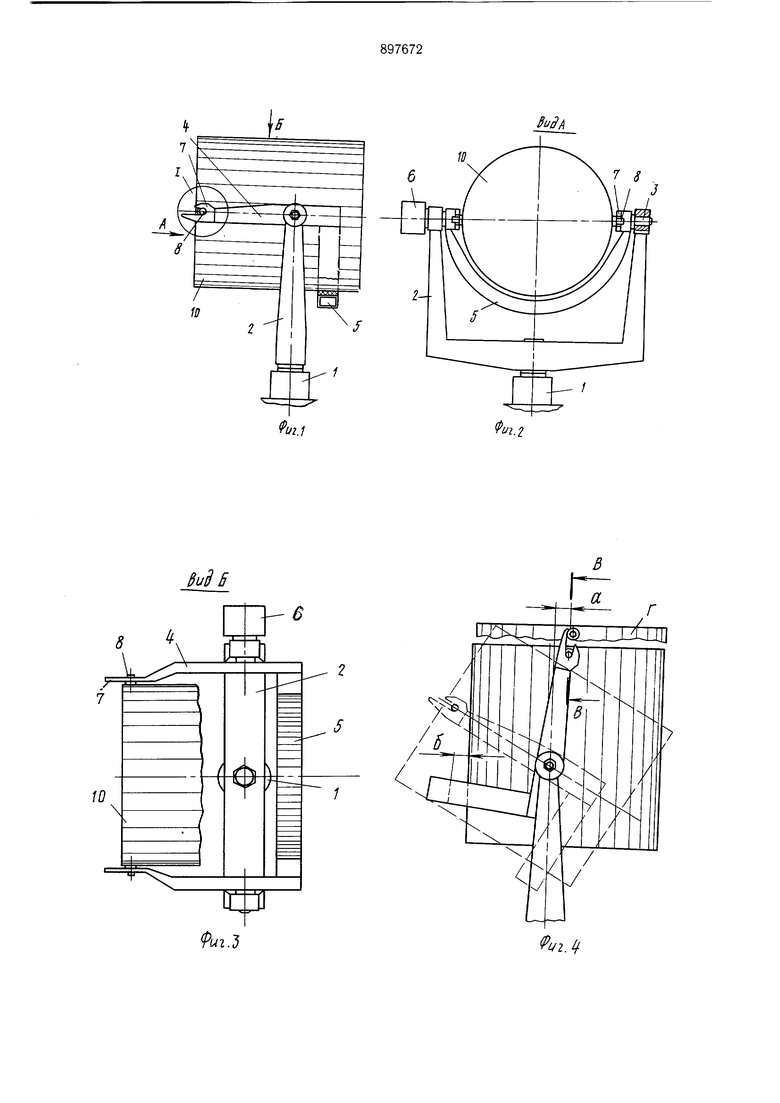
На фиг. 1 изображен предлагаемый кантователь, общий вид сбоку; на фиг. 2 - вид А на фиг. ; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - схема установки груза на кантователь (пунктиром изображено промежуточное положение-рамы при кантовании); на фиг. 5 - второй вариант выполнения кантователя; на фиг. 6 - схема установки груза на кантователь по фиг. 5; на фиг. 7 - сечение В-В на фиг. 4 и фиг. 6; на фиг. 8 - узел I на фиг. 1, вариант выполнения паза вильчатого захвата; на фиг. 9 - узел II на фиг. 5, другой вариант.
Кантователь имеет основание 1, на которо.м установлена П-образная ра.ма 2. На ее концах посредством осей 3 установлена поворотная рама, которая состоит из рычагов 4 и ложемента 5 и имеет возможность с помощью механизма кантования 6 поворачиваться на осях 3 в вертикальной плоскости. При этом ложемент 5 расположен перпендикулярно продольной оси рычагов 4. Захватные вилки 7 под цапфы 8 кантуемого
груза установлены на концах 9 рычагов 4 и имеют пазы в.
Поворотная рама посредством осей 3 крепится своими рычагами 4 к П-образной раме 2 таким образом, что рычаги 4 образуют двуплечие рычаги с осью вращения 3.
Механизм кантования 6 может иметь различное конструктивное выполнение, механический или ручной привод. Ложемент 5 выполняет функцию опоры под соответствующую, определяемую конструкцией rpysia 10, опорную зону груза.
Рама может иметь два варианта выполнения в зависимости от центровочных характеристик груза 10 (см. фиг. 1 и 5 соответственно). Отличие этих вариантов состоит только в том, что по первому варианту захватные вилки 7 и ложемент 5 расположены по разные стороны от осей 3. По второму варианту захватные вильчатые вилки 7 и ложемент 5 расположены по одну сторону от осей 3. Каждый из вариантов выполнения рамы предусматривает соответствующее ему выполнению пазов захватных вилок вильчатых захватов 7. В обоих случаях пазы выполнены фасонными, т. е. на дне паза в на одной из сторон каждого вильчатого захвата 7 имеется углубление д. Для первого варианта выполнения рамы, изображенного на фиг. 1, фасонный паз е захватных вилок 7 выполнен, как показано на фиг. 8, а для второго, изображенного на фиг. 5, фасонный паз выполнен, как показано на фиг. 9. Длина сторон вилок разная (li и la).
Расположение углубления д в пазах в захватных вилок 7 на той или другой их стороне объясняется различным направлением составляющей от веса груза 10 на захватные вилки 7.
В обоих вариантах выполнения рамы в горизонтальном положении груза 10 его цапфы 8 находятся в выемках Д и, таким образом, обеспечивается фиксация груза 10 от смещения вдоль его оси.
Устройство работает следующим образом.
Перед кантованием груза кантователь необходимо привести в исходное положение и установить на него груз.
Для приведения кантователя в исходное положение необходимо с помощью механизма кантования 9 установить раму в вертикальное положение так, чтобы захватные вилки 7 были смещены относительно осей 3 в горизонтальном направлении на величину а. Это смещение обеспечивает зазор между ложементом 5 и грузом 10 при установке груза 10 на кантователь, что предотвращает повреждение груза.
После этого посторонним грузоподъемным средством, например краном, лебедкой
и т. д. (не показанным), груз 10 устанавлизакт на кантователь так, чтобы цапфы 8 попали в фасонные пазы в захватных вилок 7.
Крепление строп грузозахватного средства может осуществляться за те же цапфы 8 или за специальные такелажные узлы (не показанные). Из положения Г груз 10 опускают до упора цапф 8 в захватные вилки и ослабляют стропы грузоподъемного средства. После этого, не производя никаких операций закрепления груза 10 на поворотной раме, при помощи механизма кантования 6 осуществляют кантование рамы вместе с грузом 10 вокруг осей 3 из вертикального в горизонтальное положение.
В начале кантования, как только смещение а станет равным нулю (т. е. цапфы 8 груза 10 и оси 3 оказываются в одной вертикальной плоскости), цилиндрическая поверхность груза 10 касается ложемента 5 и при дальнейшем повороте часть веса груза 10 передается на ложемент 5.
Для осуществления кантования отсоединение стропов от цапф 8 не обязательно, достаточно в процессе кантования обеспечить слабину стропов. Для съема груза 10 с устройства необходимо перекантовать раму с грузом 10 в вертикальное положение. Съем груза 10 с рамы производится также без проведения предварительной операции открепления его от рамы простым подъемом с помощью грузоподъемного средства.
TaKhj.vi образом, в предлагаемом кантователе упрощена конструкция, что позволяет снизить металлоемкость ориентировочно на 10-15%. Устраняются операции закрепления и открепления груза на кантователе, что позволяет сократить время на обслуживание груза на 20-25%.
Формула изобретения
Кантователь грузов, содержащий поворотную вокруг горизонтальной оси раму, состоящую из рычагов, соединенных между собой ложементом для поддержания груза, а одни из концов упомянутых рычагов снабжены захватными вилками под цапфы кантуемого груза, отличающийся тем, что, с целью повышения производительности путем обеспечения возможности вертикальной установки груза на кантователь без последующего крепления гго на раме, ложемент смонтирован ниже захватных вилок, перпендикулярно продольной оси рычагов.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 430047, кл. В 66 F 9/04, 1972.
Sud В
В
8
D
5
ID
fw2.3
ui.lf
