(54) УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ОБЪЕКТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Адаптивное устройство для идентификации линейных объектов | 1988 |
|
SU1520478A1 |
| Система управления объектом с несколькими управляющими входами | 1985 |
|
SU1287105A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Управляемый сглаживающий фильтр | 1982 |
|
SU1061250A1 |
| Устройство для определения оптимального периода контроля и технического обслуживания изделия | 1987 |
|
SU1509963A1 |
| Идентификатор параметров стохастического динамического объекта | 1984 |
|
SU1255991A1 |
| Устройство для идентификации объекта | 1985 |
|
SU1298718A1 |
Изобретение относится к автоматик и может найти применение при проекти ровании .современных систем автоматического управления объектами с переменными параметрами. Наиболее близким техническим реше нием к предлагаемому является устройство для идентификации пара метров объекта, содержащее последовательно соединенные первый блок умножения и первый интегратор, последовательно соединенные первые элементы задержки последовательно соединенные вторые элементы задержки, выходы первых и вторых элементов задержки соединены с первыми выходами соответствующих вторых блоков умножения, а через соответствующие третьи блоки умножения - с соответствующим входом первого сумматора, выход которого через первый блок сравнения соединен со вторыми входами вторых блоков умноже ния, выход каждого из интеграторов соединен со вторым входом соответствующих третьих блоков умножения, вто рой вход блока сравнения соединен со входом первого из последовательно соединенных вторых элементов задержки 1 . Недостатки этого устройства - низкая точность определения параметров объекта, так как в процессе измерений определяются смещенные оценки параметров исследуемого или управляемого объекта. Кроме того, устройство невозможно использовать для определения параметров объекта, если его параметры изменяются во времени, а также в тех случаях, когда внешние воздействия имеют нестационарный характер. Цель изобретения - повышение точ(Носфи определения параметров объекта, расширение функциональных возможностей и области применения. Указанная цель достигается тем, что устройство содержит вторые сумматоры и последовательно соединенные второй блок сравнения, блок определения абсолютной величины, четвертый блок умножения, второй интегратор и третий сумматор, выход каждого из которых соединен со входом соответствующего первого блока умножения, вход каждого второго блока сравнения соединен с выходом соответствующего второго блока умножения,.выход и вход вторых интеграторов соединены соответственно с первым и вторыг входами
сосзтветствующего третьего сумматора, выход каждого второго блока сравнения соединен со вторым входом соответствующего четвертого блока умножеН1ГЯ, а второй вход - с выходом соответствующего второго интегратора, вход каждого первого интегратора соединен со вторым входом соответствуюшего второго сумматора.
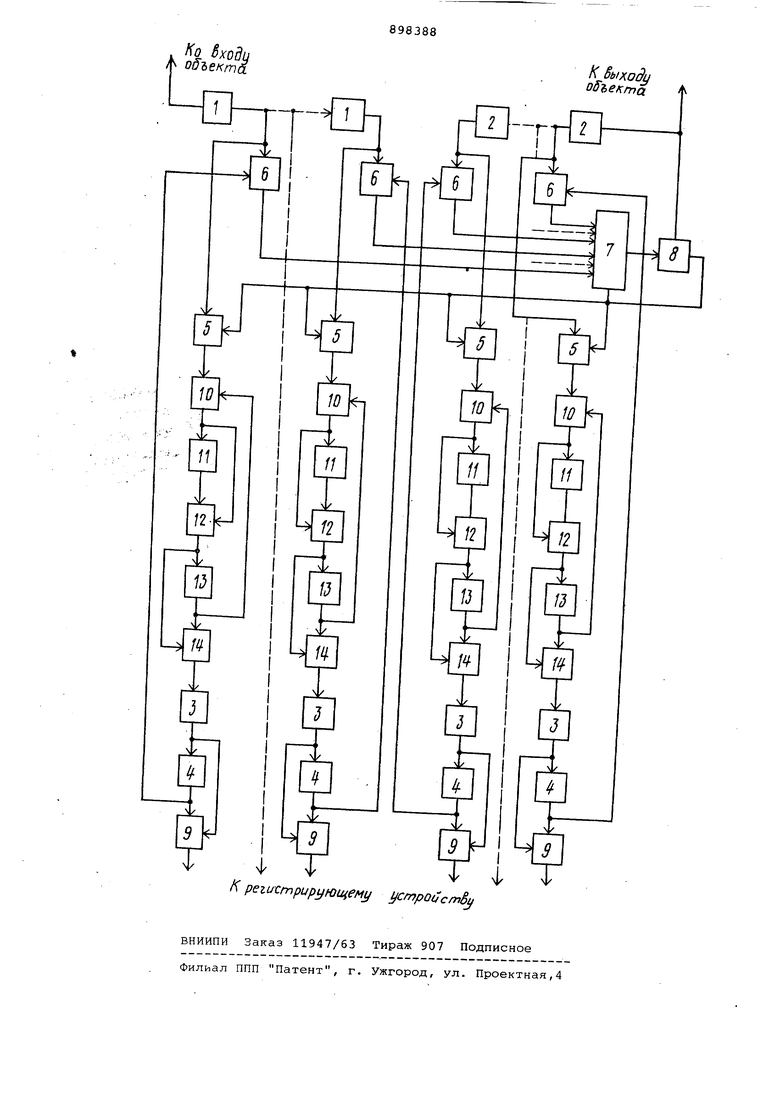
На чертеже приведена блок-схема j/стройства.
Устройство содержит последовательно соединенные первые элементы 1 задержки, последовательно соединенные вторые элементы 2 задержки, первые блоки 3 умножения, первые интеграторы 4, вторые блоки 5 умножения третьи блоки б умножения, первый сумматор 7, первый блок 8 сравнения, вторые сумматоры 9, вторые блоки 10 сравнения, блоки 11 определения абсолютной величины, четвертые блоки 12 умножения, вторые интеграторы 13 и третьи сумматоры 14.
Оценки параметров идентифицируемого объекта определяются в соответствии с алгоритмами, представляющими собой нелинейные рекуррентные процедуры оценивания, которые в случае квадратичной функции потерь имеют следую1дий вид,
C Vi -ctn-i -vrAX ULnT-c vi-i ii:vi)itrt T|,
где , - векторы несмещен-
ных оценок параметров объекта (коэффициентов уравнеНИИ дннамики нестационарногообъекта) в текущий п и предыдущий п-1 моменты времени, соответственно;
7, п - вектор ситуаций;
- выходная координата идентифицируемого объекта или сигнал, измеряемый на выходе объекта; Г - коэффициент пропорциональности; оценка математи ческого ожидания сигнала ( -c n-l31z n )ztn , которая определяется по алгоритму
)(,xt;vlИ -c I 1-2 Z
-il)itvi-i i| -g- :n tcxtn -c i:n-iui:ni) -i3-c-r :vi-nii:viH)zi:vi- lut ii-zi: i-oT,l,
где у(п - коэффициент пропорциональ ности.
itvi(,xLn-2,...,, l,V(tlrt-2.:i,..HlM-pl),
1С1:Си:,ц,1;и ,.-.. ,Ъ2Пи:,.-,р&
где - входная координата идентифицируемого объекта или сигнал,поступающий на вход объекта в п-1 момент времени;
q.n,b. коэффициенты уравнений динамики объекта при координатах состояния и управления u(n-j, соответственно 9,р - порядок полинома коэффициентов а и Ь, соответственно.
Устройство работает следующим образом.
С помощью первой группы 1 элементов задержки в устройстве формируется составляющая вектора ситуаций (, ,..., ), а с помощью второй группы 2 элементов задержки - составляющая (, , . . . , ). Таким образом, на выходах первой 1 и второй 2 групп элементов задержки формируется вектор ситуаций .
В дальнейшем, поскольку принцип работы всех каналов для определения параметров объекта одинаков, рассмотрим работу k-ro канала, позволяющего определять несмещенную оценку параметра
,
и :У1-л). i-ri 3
Сигнйл xln-k поступает с выхода k-ro элемента задержки 2 на первый вход второго блока 5 умножения и на первый вход третьего блока 6 умножения, на второй вход которого поступает с вьлхода первого интегратора 4 сигнал , а результирующий сигнал с выхода третьего 6 блока умножения поступает из входов первого сумматора 7, на остальные входы которого подаются соответстве.ннуе сигналы а п-1 и с выходов третьих 6 блоков умножения всех каналов определения параметров объекта. На выходе первого cy « aтopa 7 вырабатывается
ЕР
сигнал . q m-i х h-i 4. b.tn-i u tn-i
1-1i H
, который вычитается первым блоком. 8 сравнения из сигнала , поступающего с выхода идентифицируемого объекта на первый вход первого блока 8 сравнения. Сигнал
еР
.Lи-nxt l-i -SЪi h-1 иtv1-j
ir-t)-(
с выхода блока 8 сравнения поступает на второй вход второго блока 5 умножения, где он умножается (в k-м канале) на сигнал , а результирующий сигнсш поступает на первый вход второго блока 10 сравнения, где из негр вычитается сигнал IVV lxtvv-1l-I,aTvi-l14M-lMl-ab Ct -2lH n- L поступающий с выхода второго интегратора 13, Реэультирующий сигнал с выхода второго бл ка 10 сравнения (. )(..Vi-i Z to tH-ilHtn-l-jDxtH-iKl поступае на второй вход четвертого блок 12 умножения с масштабным коэффициентом, равным , и н вхол блока 11 вычисления абсолю ноД величины. Выходной сигнал / ( е р ,MH xcM-ii-.Sb Cvi-ibt -j) iii 1-1 л, ер -M(.xtM-i --aa M-2ixCn--i-i abitH-2 M i.-ijii J tv -l-33)ntv -1-K3l,| блока 11 вычис ления абсолютнойвеличины умножается четвертымблоком 12 умно жения на сигнал UtKl - xtw- il-| bj инЗ и A i:vi-i K tn-K3-/ СхСУ1П -.2а 1:и-2 х1и-1S b:, tvi-11 и tn-3-n X Си и-k 3 г,, результирующий сигнал с выхода четв того блока 12 умножения поступает н вход второго интегратора 13 и на вт рой вход третьего сумматора 14, на первый вход которого с выхода второ интегратора , 13 поступает сигнал M(xtv -n-Ila tM-l x nH-i -.2bil w-2.lM 1-Ч3-1 tnH-j xtM-Kl, которой одновременн подается и на второй вход второго блока 10 сравнения. На выходе второго сумматора 14 вырабатывается сигнал, представляющий собой текущу оценку математического ожидания . V(xlhi -.Sa Ih-iiKtu-i 1Sb. wCvi-jlAl 1Я 1-1 который умножается первым блоком 3 умножения на коэффициент Г и поступает на вход первого интегратора . На выходе интегратора 4 образуется сигналС п-1, который вторым сумматором -9 складывается с выходным сигналом первого блока 3 умножения. . Выходной сигнал второго суммат ра 9 k-ro кансша представляет собой сигнал, соответствующий несмещенной оценке параметраQi n . Аналогичным способом на выходах вторых сумматоров 9 всех каналов образуются сигналы, соответствующие значениям остальных параметров идентификации объекта. Технико-экономический эффект от применения предлагаемого устройства состоит в повышении точности измерений, расширении технических возможностей и области применения за счет получения несмещаемых идентифицируюмых параметров. Формула изобретения Устройство для идентификации параметров объекта, содержащее последовательно соединенные первый блок умножения и первый интегратор, последовательно соединенные первые элементы задержки, последовательно соединенные вторые элементы задержки, выходы . первых и вторых элементов задержки соединены с первыми входами соответствующих вторых блоков умножения, а через соответствующие третьи блоки умножения - с соответствующим;-входом первого cyMt-iaTopa, выход которого через первый блок сравнения соединен со вторыми входами вторых блоков умножения,выход каждого из интеграторов соединен с вторым входом соответствующих третьих блоков умножения, второй вход блока сравнения соединен со входом первого из последовательно соединенных вторых элементов задержки, отличающее ся тем, что, с целью повышения точности и расширения функциональных возможностей устройства, оно содержит вторые сумматоры и последовательно соединенные второй блок сравнения, блок определения абсолютной величины, четвертый блок умножения, второй интегратор и третий сумматор, выход каждого из которых соединен со входом соответствующего первого блока умножения, вход каждого второго блока сравнения соединен с выходом соответствующего второго блока умножения, выход и вхЬд вторых интеграторов соединены соответственно с первым и вторыг входами соответствующего третьего сумматора, выход каждого второго блока сравнения соединен со вторым входом соответствующего четвертого блока умножения/ а второй вход - с выходом соответствующего второго интегратора, вход каждого первого интегратора соединен со вторым входом соответствующего второго сумматора. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 326552,кл. G 05 В 17/02, 1974 (прототип) .
