Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем управления техническими объектами.
Модель рассматриваемого класса . объектов имеет вид:
Y(p)|-(l-e ) и/(р) + ,
Р F
(.-е).
fO
и (Р)
-р(п-о)дГ . -рг. е +k w(p)8
+f(p) (1)
где и - изменение общего управляющего воздействия V,
ние одновременно на весь обрабатываемый материальный поток в объекте управления в течение времени t пребывания материала в объекте;
U; - изменение j локального
равляющего воздействия Vj, оказывающего влияние на материальный поток только в j-й локальной зоне объекта управленияJ п - число следующих друг за другом локальных зон объекта управления;
20
25
и Т
п
)
время прохождения материальным потоком локальной зоны; W - изменение контролируемого внешнего воздействия f - эффекты влияния неконтролируемых внешних воздействий;
у - изменение управляемой выходной нерешенной;
коэффициенты усиления каналов преобразования изменений соответственно общего управляющего, локальных управляющих и контролируемого внешнего воздействий.
Целью изобретения является повьше- ние точности управления объектом.
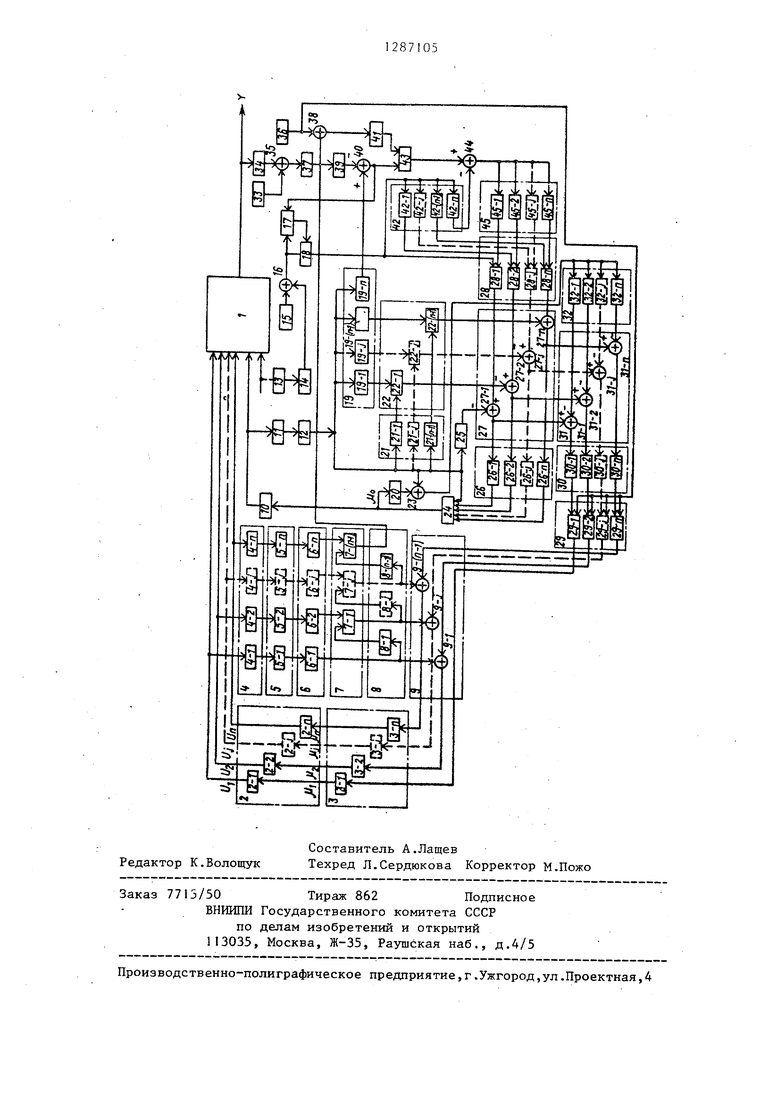
На чертеже приведена блок-схема системы управления.
Система управления объектом с несколькими управляющими входами содержит объект 1 управления, блок 2 исполнительных органов, третий блок 3 масштабирующих элементов, блок 4 датчиков локальньк управляющих воздейст- вий, блок 5 фильтров низкой частоты второй блок 6 интеграторов, третий блок 7 сумматоров, второй блок 8 элементов задержки, третий блок 9 элементов сравнения, исполнительный орган 10, датчик 11 общего управляющего воздействия, первый фильтр 12
низкой частоты, датчик 13 контролируемого внешнего воздействия, второй фильтр 14 низкой .частоты, первый источник 15 постоянного сигнала, первый элемент 16 сравнения, блок 17 адаптации, блок 18 умножения, первый блок 19 интеграторов, модель 20 исполнительного органа без запаздывания, второй блок 21 масштабирующих элементов, второй блок 22 сумматоров, шестой элемент 23 сравнения, первый, сумматор 24, третий масштабирующий элемент 25, первый блок 26 масштабирующих элементов, первый блок 27
оказывающего влия-15 элементов сравнения, первый блок 28
сумматоров, четвертый блок 29 сумматоров, пятый блок 30 масштабирующих элементов, второй блок 31 элементов сравнения, четвертый блок 32 масштабирующих элементов, второй источник 33 постоянного сигнала, датчик 34 выхода объекта, второй элемент 35 сравнения, третий источник 36 постоянного сигнала, третий фильтр 37 низкой частоты, пятый элемент 38 сравнения, первый масштабирующий элемент 39, третий элемент 40 сравнения, второй масштабирующий элемент 41, первый блок 42 элементов задержки, второй cjTMMaTop 43, четвертый элемент 44 сравнения, блок 45 адаптивных экст- раполяторов.
Блок 2 исполнительных органов содержит исполнительных органов. (2-1) - 35 (2-п), третий блок 3 масштабирующих элементов содержит п масштабирующих элементов (3-1) - (3-п), блок 4 датчиков содержит п датчиков локальных управляющих воздействий (4-1) - (4-п), блок 5 фильтров низкой частоты содержит п фильтров низкой частоты (3-Ь) - (5-п),второй блок 6 интеграторов содержит п интеграторов (6-1) - (6-п), третий блок 7 сумматоров содержит (п-1) сумматоров (7-1) - 7(п-1), второй блок 8 элементов задержки содер- кит (п-1) элементов задержки с (8-1) по 8-(п-1), третий блок 9 элементов сравнения содержит (п-1) элементов сравнения с 9-1 по 9-(п-1), первый блок 19 интеграторов содержит п интеграторов (19-1) - (19-п), второй блок 21 масштабирующих элементов содержит (п-1) масштабирующих элементов с 21- 1 по (п-1), второй блок 22 сумматоров содержит (п-1) сумматоров с 22-1 по 22-(п-1), первый блок 26 масштабирующих элементов содержит п
30
40
45
50
55
31
масштабирующих элементов (26-1) - (26-п), первый блок 27-элементов сравнения содержит п элементов сравнения (27-1) - (27-п), первый блок 28 сумматоров содержит п сумматоров (28-1) (28-п),, четвертьм блок 29 сумматоров содержит п сумматоров (29-1) - (29-п пятый блок 30 масштабирующих элементов содержит п масштабирующих элементов (30-1) - (ЗО-п), второй блок 31 элементов сравнения содержит п элементов сравнения (31-1 )- (31-п), четвертый блок 32 масштабирующих элементов содержит п масштабирующих элементов (32-1)- (32-п), первый блок 42 элементов задержки содержит п элементов задержки (42-1) - (42-п)5 блок 45 адаптивных экстраполяторов содержит п адаптивных экстраполяторов (45-1) - (45-п).
На чертеже обозначено: TJ - общее управляющее воздействие; U ,11,,,., . . ., j локальные управляющие воздействия в количестве п; и , Р2 Pj« . Pf, сигналы управления исполнительными органами, реализующими соответственно общее и локально управляющие воздействия; W - контролируемое внешнее воздействие объекта управления; Y - выход объекта управ- ления-.
Объект управления представляет собой, например, алгомерационную машину. Общим управляющим -воздействием Ug является скорость алгомерационной ленты, перемещаемой посредством ис полнитёльного органа 10, представ- лякядего собой двигатель постоянного тока с регулируемой скоростью. Датчик 11 общего управляющего воздейст- ВИЯ представляет собой, например, та хогенератор. Управляемым выходом Y объекта управления является степень допекания алгошихты, определяемая датчиком 34 выхода в процессе изме- рения температуры продуктов горения в вакузлм-камерах агломашины. Локаль- mi e управляющие воздействия U/ (, п) представляют собой расход воздуха просасываемого через слой аглошихты j-й вакуум-камерой, изменяемой посредством исполнительных органов 2-j (), представляющих собой, например, однооборотные исполнительные механизмы. Величины локальных управ- ляющих воздействий измеряются посредством датчиков 4-J (,n), представляющих собой, например, дифференциальные манометры. Контролируе1054
мое внешнее воздействие представляет собой, например, влажность агломерационной шихты, измеряемую датчиком 13 контролируемого внешнего воздействия, в роли которого используется, например, кондуктометрический датчик влажности. Интеграторы 4-j (j l,n) и 1 9-j (,n) представляют собой интегрирующие звенья с отсечкой, каждое из которых выполняется в виде последовательно соединенньгк элементов сравнения и интегрирующего элемента, причем первый вход элемента сравнения через элемент задержки подключен ко второму его входу. Величина времени задержки в элементе задержки соответствует времени отсечки. Модель 20 исполнительного органа без запаздывания представляет собой интегрирующее звено. Фильтры 5-J (,n), первый 12, второй 14 и третий 37 фильтры низкой частоты выполнены из апериодических звеньев.
Предлагаемая система управления работает следующим образом.
Общее управляющее воздействие U, контролируемое внешнее воздействие W, выход Y и локальные управляющие воздействия U ,...,U измеряются посредством соответственно датчиков 11, 13, 24 и датчиков 4-1,...,4-п блока 4 датчиков. Сигналы с выходов датчиков 11 и 13 и с выходов датчиков 4-1,...,4-п поступают на входы соответственно первого 12 и второго 14 фильтров низкой частоты и на входы фильтров 5-1,...,5-11 блока 5 фильтров низкой частоты. Сигнал с выхода датчика 34 о выходе Y объекта поступает на вход второго элемента 35 сравнения, где сравнивается с сигналом о заданном значении Y выхода объекта, поступающим с выхода второго источника 33 постоянного сигнала. Получаемый в результате сигнал о величине ошибки управления y(t)Y(t)-Y поступает с выхода второго элемента 35 сравнения на вход третьего фильтра 37 низкой частоты..
Фильтры 12, 14, 37 и 5-,...,5-п низкой частоты настраиваются таким образом, чтобы усреднить значения поступающих на их входы сигналов на интервале М . Так как в качестве фильтров здесь используются апериодич ес- кие звенья с передаточной функцией.
W (р) ---г , настройка их осущест-
nf
в ориента- 3,5 Т.
51
вляется пу.тем выбора Т ции на соотношение л
В результате на выходах фильтров 5-1, . . ., 5-п блока 5 фильтров низкой частоты формируются сигналы об усред- ненных на интервале дТ значениях локальных- управляющих воздействий U,(t), . . . ,и.(t) , поступающие на вхо- ды соответствующих интеграторов 6-1, ...,6-п второго блока 6 интеграторов На выходе первого фильтра 12 низкой частоты формируется сигнал об усредненном значении U (t) общего управляющего воздействия , поступающий на входы.интеграторов 19-1,...,19-п пер- вого блока интеграторов, на входы масштабирующих элементов 21-1,,.., 21-п второго блока 21 масштабирующих элементов, на второй вход щесто- го элемента 23 сравнения, на первый вход первого сумматора 24 и на вход третьего масштабирующего элемента 25. На выходе второго фильтра 14 низкой частоты формируется сигнал об усредненном значении W(t) контролируемого внешнего воздействия, пающий на первый вход первого элемента 16 сравнения. На выходе третьего фильтра 37 низкой частоты формиг руется сигнал об усредненном значе- НИИ y(t) ошибки управления, соответствующей выходящей из объекта п-и порции материала, поступающий на вход первого масштабирующего элемента 39.
Интеграторами 6-1,...,6-п осущест- вляется интегрирование соответствуюл/ /
щих сигналов 0 vt),...,U(t) на интервале времени &t . В результате на выходе каждого интегратора 6-j (j Г,п) формируется сигнал об интеграль ной величине j-ro локального управляющего воздействия, реализованного к текущему моменту времени для j-й порции материала.
t -
(j,t) J и, (0) d0, (2) t-u
Эти сигналы используются для расчета по каждой j-й порции материала интегрального количества U (j,t) ло- кальных управляющих воздействий, реализованного для этой j-й порции за время пребывания ее в объекте. Б агломерационной установке величине и (j t) соответствует количество воз- духа, прошедшего через j-ю порцию щихты при перемещении ее от 1-й по j-ю вакуум-камеры. Для 1-й порции материала, находящейся в 1-й локальной
5
87
O 5 0 0
35
0
45
50 55
1056
зоне объекта (j l), U(l , t)U, (t) . Для каждой последующей j-й порции и (j9 t) определяется как сумма реализованных ранее в предшествующих локальных зонах (при прохождении этих зон рассматриваемой порцией материала) интегральных значениях локальных управлений. С этой целью сиг- .налы U-(t),...,U(t),...U (t) с вы --J .
ходов интеграторов 6-2, ...,6-j,. . ., 6-п поступают на вторые входы соот- ветствующих им сумматоров 7-1,..., 7-J,...,7-(п-1) третьего блока 7 сумматоров. На вторые входы этих сумматоров поступают сигналы с выходов соответственно элементов 8-l,...,8-j, ...,8-(п-1) задержки второго блока 8 элементов задержки. Величины этих сигналов представляют собой интегральное количество локальных управляющих воздействий U l(j-), (t-uT), которое соответствовало j-ой пор- ции материала на момент времени (t- прохождения (J-1)-й локальной зоны объекта управления. Для этого на вход каждого элемента 8-j ( n-1) задержки подается сигнал с выхода предшествующего по номеру сумматора 7-{j-l). На вход же элемента 8-1 задержки поступает сигнал с выхода интегратора 6-1. В элементах 8-1,...,8-п задержки эти сигналы задерживаются на интервал временил . В результате на выходе интегратора 6-1 формируется сигнал U (Ijt) U (t), a на выходах сумматоров 7-1, ...57-jJ...,7-(п-1) формируются соответственно сигналы U(2,t),... .t,..., ), определяе- .мые по формуле
,t)u4(J-l),(t-uT) ) (3)
Интеграторами 19-119-п первого блока 19 интеграторов осуществляется интегрирование сигнала Uj,(t), поступающего с выхода первого фильтра 12 низкой частоты, на интервалах времени JAT соответствующих времени пребывания каждой j-й порции материала в объекте управления. В результате на выходе каждого интегратора 19-J формируется сигнал
t
u,j,t) u,(e)d9, (4)
t-jut
соответствующий интегральному значению общего управляющего воздействия, реализованного за время пребывания
7
порции материала в объекте управления.
Сигнал y(t) об усредненном значении ошибки управления по п-й порции ,материала в первом масштабирующем элементе 39 умножается на постоянный коэффициент Т/k, равньш обратной величине статического коэффициента k усиления канала преобразования изменений общего управляющего воздействия, умноженной на интервал времени Т. На выходе первого масштабирующего элемента формируется сигнал корректировки интегрального значения общего управляющего воздействия, необходимой для компенсации ошибки управления. Этот сигнал в третьем элементе АО сравнения вычитается из интегрального значения U(п,t) общего управляющего воздействия, реализованного за время пребывания в объекте выходящей из него п-й порции материала, В результате на выходе третьего элемента 40 сравнения формируется сигнал об идеальном интегральном значении общего управляющего воздействия.
иГ (t)u(n,t)- I y(t), (5)
реализация которого к настоящему моменту позволила бы получить y(t)0 при фактических значениях интегрального количества локальных управляю .tv i f M-.-i iiflrK IeM iIiJ-Wier Li as (7) u)- A ., v+ w2(e-T) fi . /J
, где u: ; (tX (t)-ur;
DO - базовое значение интегрального общего управляющего воздействия;
А - интервал адаптации; У - постоянный коэффициент; 0 - переменная интегрирования..
Сигнал ли г, (t) с выхода блока 18 умножения поступает на входы элементов 42-1,...42-п задержки первого блока 42 элементов задержки, где задерживается на интервал времени л в элементе 42-1 задержки, на интервал JAT в элементе 42 задержки, на интервал п U.T в элементе 42-п задержки . .
Сигнал об интегральном количестве локальных управляющих воздействий и (n,t ), реализованном для п-й порции материала за время ее пребывания в объекте, поступает с выхода сумма871058
1ЦИХ воздействий U (n,t) и контролируемого внешнего воздействия W(t-C), ,
Сигнал об усредненном значении
W(t) контролируемого внешнего воздей- 5 ствия с выхода второго фильтра 14 низкой частоты поступает на первый вход первого элемента 16 сравнения, где из него вычитается сигнал о базовом значении W , поступающий с выхода первого источника 15 постоянного сигнала. Полученный сигнал о величине W(t) контролируемого возмущения с выхода первого элемента 16 сравнения подается на первый вход блока 18 умножения , где умножается на коэффициент Kj(t), сигнал о котором поступает на второй вход этого блока умножения с выхода блока 17 адаптации. В
результате на выходе блока 18 умноже- 0
5
ния формируется сигнал о величине &Цд (t) изменения интегрального значения общего управляющего воздействия, необходимого для компенсации
25 -(.п
. (t) ),w(t),
(6)
где K(t) - адаптируемый коэффициент. Адаптация K(t) осуществляется в блоке 17 адаптации по сигналам об (t) 30 и w(t), поступающим на его входы с выходов соответственно четвертого 40 и первого 16 элементов сравнения, по формуле
тора 7-(п-1) третьего блока 7 сумма- 4Q торов на вход пятого элемента 38 сравнения, где из него вычитается сигнал о базовом значении U интегрального количества локальньпс управляющих воздействий, поступающий с выходатреть- 4J его источника 36 постоянного сигнала. Полученный сигнал разности поступает на вход второго масштабирующего элемента 41, где умножается на постоянk
ный коэффициент k - .В резуль50 -тате на выходе второго масштабирующего элемента 41 формируется сигнал 41 формируется сигнал о величине изменения интегрального значения обще
,, го управляющего воздействия &. (t) эквивалентного по своему влиянию на выход объекта величине tU(n,t)-U ,
т.е.
&и (t)u (n,t)(8)
9 .
Сигнал о величине дК (t) с выО П ;
хода второго масштабирующего элемента А по.ступает на вход второго сумматора 43, где суммируется с сигналом о величине Uj (t), поступающим с вы- хода третьего элемента 40 сравнения. Из сигн-ала о полученной сумме в четвертом элементе 44 сравнения вычитается сигнал с выхода элемента 45-п задержки первого блока 45 элементов задержки о величине &Uoi (t-n, ал ) изменения интегрального значения общего управляющего воздействия, необходимого для компенсации контролируемого возмущения, соответствующего выходящей из объекта п-ой порции материала . В результате на выходе четвёртого блока 44 сравнения формируется сигнал оценки приведенного интегрального значения общего управляющего воздействия..
u -(t)(t)-buu:, (t)(9)
-ftU (t-п-дТ), изменения которого обеспечили бы ком- пенсацию неконтролируемых возмущений при условии, что , t)U и W(t-nAr ).-
С выхода четвертого элемента 44
сравнения сигнал об U (t) через
адаптивные экстраполяторы 45-1,,.., 45-п блока 45 адаптивных экстраполя- торов поступает на первые,входы соответствующих сумматоров 28-1, . .., 28-п первого блока 28 сумматоров. На второй вход первого 28-I из сумматоров первого блока сумматоров поступает сигнал с выхода блока 18 умноже ния о величине uU () изменения : интегрального значения общего управ- ляющего воздействия, необходимого для компенсации текущего значения контролируемого возмущения, соответствующего порции материала, поступающего в объект управления (). На вторые входы остальных сумматоров 28-1,..., 28-J , ...,28-п пocтyпaюt сигналы с выходов соответственно элементов 45-1,.. .,45-(j-l),...,43-(п-1) задержки первого блока 45 элементов за- держки о величинах соответственно uUl(t-Arj,..., (j-l)-a n ,.. ., t-(n-l )&t корректировок интегральных значений общего управляющего воздействия для компенсации контро- лируемого возмущения, имевшего место в предшествующие моменты времени.Другими словами на вторые входы суммато ров 28-1,...,28-п поступают сигналы
0
5
0
5 0 5 0 55
0510
о траектории корректировок д ),.. UcL (j-l )д-1 ,..., д (n-l )1 7 , реализация которых к моменту (t+fvV) обеспечит компенсацию контролируемого возмущения, соответствующего 1-й, ...,j-й,...,п-й порции материала. В блоке 45 адаптивных экстраполяторов приведенное интегральное общее управляющее воздействие экстраполируется на интервал п-си в экстраполя- торе 45-1, на интервал (n+I-j)uT в экстраполяторе 4.5-j на интервал ui в экстраполятора 45-п. На выходе каждого экстраполятора 45-j () формируется сигнал, поступающий на второй вход соответствующего сумматора 28-j
ufU+(n+l-j)aT -W/lu:; (t), (8). где W. оператор (45-j)-ro экстраполятора .
В результате сложения сигналов с выходов экстраполяторов с соответствующими сигналами с выхода блока 18 умножения и элементов 42-1,...,42- (п-1) задержки на выходе сумматоров 28-1,...,28-j,...,28-п формируются сигналы о прогнозируемой траектории идеального интегрального общего управляющего воздействия в виде прогнозируемых значений идеальных интегральных управлений
л
и„ j,t+(n+l-j) t+(nH-l-j)aTl + + (j-)(11)
для каждой j-й порции материала в объекте управления.
Сигнал с выхода первого фильтра 12 низкой частоты поступает на входы масщтабирующих элементов 21-1,..., 2I-J...,21-(п-1) второго блока 21 масштабирующих элементов и на вход третьего масштабирзпощего элемента 25, где умножается на соответствующие весовые коэффициенты: a, (n-l)4i - в элементе 21-1., а:, (n-j)uT - в элементе 21-J, лТ - в элементе 21-(п-1) и на коэффициент а n-At - в третьем масштабирующем элементе 25 . Сигналы с выходов масщтабирующих элементов 21-1 ,. .. ,21-(п-1.) поступают на первые входы соответствующих сумматоров 22-1, ...,22-(п-1) второго блока 22 сумматоров, где суммируются с сигналами, поступающими с выходов соответств5пощих интеграторов 19-1,... 19-(п-1) первого блока 19 интеграторов . В результате на выходе третьего элемента 25 сравнения и сумматоров 22-1,...,22-j,...,22-(п-1) второго
II1
блока сумматоров формируются расчетные и„ значения интегрального общего управляющего воздействия, которые будут соответствовать отдельным порциям материала на выходе их из объек- та при УСЛОВИИ;, что начиная с текущего момента времени общее управляющее воздействие будет неизменным и равным величине U(t), На выходе третьего элемента сравнения формиру- ется сигнал и„ для входящей в объект первой порции материала Cl,(t+n AT)UO (t)-n-flT. На выход e сумма тора 22-1 формируется сигнал для второй порции материала Uo |2,Ct+ + (п-1 ) и, (t) (п-1 )дГ :+C(i , t) на выходе 22-(J-1)-го сумматора формируется сигнал j-й порции материала Ur{j. t(n+l-j),(t)- «(n-4-l-j) a7+urt(j-l),t. На вьцсоде сумматора 22-(п-1) формируется сигнал для п-й порции материала u f (n,t+ + M))6T+u;Un-l),t.
Сигнал с выхода третьего элемента 25 сравнения поступает на второй вход элемента 27-1 сравнения первого блока 27 элементов сравнения, где вычитается из сигнала, поступающего с выхода сумматора 28-1 первого блока 28 сумматоров. Сигналы с выходов сумма- торов 22-1, .. .,22-J,...,22-(п-1) второго блока 22 сумматоров поступают на вторые входы соответствующих элементов 27-2,...,27-(j+l),...27-п сравнения первого блока 27 элементов сравнения, где они вычитаются из сигналов , поступающих с выходов соответствующих сумматоров 28-2, ... ,28-(j + +1 ),...,28-п. В результате на выходах элементов 27-1,...,27-j,...,27-п сравнения формируются сигналы о траектории прогнозируемых ощибок реализации идеальных интегральных значений общего управляющего воздействия, величина которых для каждой j-й пор- ции определяется
ли; j, (n+i-j )4i (n-n -j
-. Л Ип 1
«лг| и„ {j,t-H(n+l-j)-AOj,,n при условии, что в дальнейщем с момента времени t+tp управляющее воздействие будет неизменным и равным величине Uo (t ), где 1 - время запаз- дывания при реализации управлений исполнительным органом.
Сигналы с выходов элементов 27-1, 27-J,...,27-п сравнения поступают че
0
5 0
0
10.512
рез соответствующие масщтабирующие элементы 26-1,..,,26-j,...,26-п первого блока 26 масщтабирующих элементов, где они умножаются на весовые коэффициенты b . причем
J (.n+i-j ai h
l d. 1 , поступают на входы первого
j; 1
сумматора 24, где суммируются с сигналом и (t) с выхода первого фильтра 12 низкой частот. Весовые коэффициенты bj учитывают, что прогнозируемая ошибка реализации идеального интегрального общего управляющего воздействия по j-й порции будет компенсироваться текущим управляющим воз- действием/на оставщемся интервале времени (n+l-j)AT пребывания этой порции материала в объекте управления . В результате на выходе первого сумматора 24 формируется сигнал fJ,() поступающий на вход исполнительного органа 10, выход которого в виде текущего общего управляющего воздействия и(t) подается на вход объекта 1 управления.
Одновременно сигнал )и„(Ь) поступает на вход модели 20 исполнительного органа без запаздывания, на выходе которой формируется сигнал оценки и (t+TpH ) фактического общего управляющего воздействия U (t+T pn ) с упреждением на время TPI, запаздывания в исполнительном органе. Этот сигнал через шестой элемент 23 сравнения, где вычитается из сигнала 1, (t) с выхода первого фильтра 12 низкой частоты, поступает на входы масщтабирующих элементов 32-1,...,32-j,..., 32-п, где сигнал разности U(t) - U(t+tpn) умножается на коэффициент С лТ-h в элементе 32-1 на коэффициент С. (n+l-j)д1 - в элементе 32-j, на коэффициент С tA - в элементе 32-п.
Сигналы с выхода масштабирующих элементов 32-1,...,32-п поступают на входы соответствующих элементов 31-1, ...,31-п сравнения второго блока 31 сравнения, где вычитаются из сигнат лов, поступающих с выходов соответствующих элементов 27-1,...,27-п срав- первого блока 27 сравнения. В результате на выходах элементов 31-1, ...,3I-J...,31-п сравнения формируются сигналы о траектории прогнозируемых ошибок реализации идеальных интегральных значений общего управля131287
ющего воздействия, величина которых определяется для каждой j-й порции .
,t+()AT AUr{j,t-f(n+
+ l-J) LUo (t)--U, (t+г ) (n+i-j)fi7,5 j -Un , (13)
в ориентации на оценку фактического общего управляющего воздействия
и; (t+v).
Сигналы с выходов элементов , ...531-п сравнения .поступают на входы соответствующих масщтабирующих элементов 30--1 , . . ., ЗО-п, пятого блока 30 масштабирующих элементов, где ошибки ли„ пересчитываются в эквивалентные изменения uU интегрального количества U локальных управляющий воздействий путем умножения на пос
k
тоянный коэффициент г Г Сигналы
К.„ Кл
о корректировках интегрального количества локальных управляющих воздействий с выходов масштабирующих элементов 30-1,...s30-n поступают на
входы соответствующих сумматоров 29-1 .,.,29-п четвертого блока 29 сумматоров , где суммируются с сигналом о базовой величине, интегрального количе - ства локальных управляющих воздейст- ВИЙ и , поступающим с выхода третьего источника 38 постоянного сигнала В результа.те на выходе сумматоров 29-1,...s29-j,.о.529-п формируются сигналы о требуемом для каждой j-й порции мате; нала интегральном количестве локальных З правляюидах воздействий .
,. , k: яр f .
и { j,t-t-(n+l--j)Avl и (J
(n+l--j)&tl , j Г; (14)
Сигнал с выхода сумматора 29-1 о величине ,t+n tft l|для входящей в объект первой порции материала по- дается на вход масштабирующего элемента 3-1 третьего блока 3 масштабирующих элементов, Сигналы же с выходов масштабирующих элементов 29-2,.. 29-j J...,29-п поступают на выходы со- ответствующих им элементов 9-1, , . ., 9-J J...,9-(n-J) сравнения третьего блока 9 элементов сравнения, ,где из них вычитаются сигналы об ужефеали- зованном к моменту времени t по каж- дои j-й порции материала интег заль- ном количестве локальных управляющих воздействий U (j э t), с выхода интег- ipaTOpa 6-1 второго блока интеграто
0
5
0
5
0 5
0
с „
10514
ров в элементе 9-1 сравнения; с выходов сумматоров 7-1, . . . ,7-(п-2) третьего блока 7 сумма.торов соответственно в элементах 9-2, . . .,9-(п-1) сравнения. В результате на выходах эле- ментов 9-1 , . . .,9-j5...,9-(п-1) сравнения формируются сигналы о величине и Cjjt) остатка интегрального количества локальных управляющих воздействий для каждой j-й порции (,n) материала, который должен быть реализован за оставшийся период времени (n+l-j)AT пребывания j-й порции материала в объекте управления.
Сигналы с выходов элементов 9-1, . . . . ,9-j5...S9-(п-1) сравнения поступают на выходы соотВ Втствующих им масштабирующих элементов. В масштабирующих элементах ,...,3-j,- 3-п сигналы и (jjt) умножаются на соответствующие постоянные коэффици1
енты gj величина которых обратна величине оставшегося интервала времени (ii+l-j)ftt пребывания j-й порции материала в объекте. Формируемые в результате этих преобразований сигналы управления р.,,..., р.,.,. Mh поступают с выходов масщтабирующих элементов 3-l,...,3-jj ...,3-п на входы соответствующих исполнительных органов 2-1,...,2-j,.. 2-п блока 2 исполнительных органов, выходы которых в виде текущих локальных управляющих воздействий U.(t) выдаются на соответствующие третьи входы объекта 1 управления.
Формула изобретения
Система управления объектом с несколькими управляющими входами -содержащая последовательно соединенные первый сумматбр, исполнительньй ор- ган, датчик общего управляющего воздействия и первый фильтр низкой частоты, последовательно.соединенные датчик контролируемого внешнего воздействия, второй фильтр низкой частоты, первый элемент сравнения и блок зп 1ножения, последовательно соединенные датчик выхода объекта управления, второй элемент сравнения, третий фильтр низкой частоты, первый масштабирующий элемент, третий элемент сравнения и блок адаптации, последовательно соединенные блок адаптивных экстраполяторов, первый блок сумматоров , первый бло к элементов сравнения
15
и первый блок масштабирующихэлементов, последовательно соединенные второй блок масштабирующих элементов и второй блок сумматоров, первый блок интеграторов, первый блок элементов задержки, первый и второй источники постоянного сигнала и четвертый элемент сравнения, причем выход исполнительного органа подключен к первому входу объекта управления и являет ся его общим управляющим входом, вход датчика контролируемого внещнего воздействия соединен со вторым входом объекта, представляющим собой его внешний вход, вход датчика выходной переменной объекта подключен к, выходу объекта управления, выход первого источника постоянного сигнала соединен со вторым входом первого элемента сравнения, выход второго источни- ка постоянного сигнала соединен со вторым входом второго элемента сравнения, второй вход блока адаптации соединен с выходом первого элемента сравнения, а его выход подключен ко второму входу блока умножения, выход блока умножения соединен с входами элементов задержки первого блока элементов задержки и со вторым входом первого из сз маторов первого блока сумматоров, выход последнего из элементов задержки первого блока элементов задержки соединен с первым входом четвертого элемента сравнения выход которого соединен с входами адаптивных экстраполяторов блока адаптивных экстраполяторов, выходы остальных элементов задержки первого блока элементов задержки соединены со вторыми входами соответствующих сумматоров первого блока сумматоров, выход первого фильтра низкой частоты соедине с входами интеграторов первого блока интеграторов, с входами масштабирующих элементов второго блока масштабирующих элементов и с первым входом первого сз мматора, остальные входы которого соединены с выходами соответствующих масштабирующих элементов первого блока масшта- бирующих элементов, выход последнего из интеграторов первого бЛока интеграторов соединен со вторым входом третьего элемента сравнения, а Btixo- ды остальных интеграторов соединены со вторыми входами соответствующих сумматоров второго блока сумматоров, выход первого из сумматоров второго блока сумматоров соединен со вторым
10516
входом второго из элементов сравнения первого блока элементов- сравнения, вторые входы последующих элементов сравнения этого блока соединены с выходами соответствующих сумматоров второго блока сумматоров, о т - личающа. я ся тем, что, с целью повьш1ения точности системы, она содержит последовательно соединенные третий блок масштабирующих элементов блок исполнительных органов, блок датчиков локальных управляющих воздей-.. ствий, блок фильтров низкой частоты и второй блок интеграторов, последовательно соединенные второй блок элементов задержки и третий блок сумматоров, последовательно соединенные четвертьш блок масштабирующих элементов, второй блок элементов сравнения пятый блок масштабирующих элементов и четвертый блок сумматоров, последовательно соединенные третий источник постоянного сигнала, пятый элемент сравнения, второй масштабирующий элемент и второй сумматор, по.с- ледовательно соединенные модель исполнительного органа без запаздывания и шестой элемент сравнения, третий блок элементов сравнения и третий масштабирующий элемент, причем выходы исполнительных органов блока исполнительных органов подключены к соответствующим третьим входам объекта управления и являются его локальными управляющими входами, выход первого из интеграторов второго блока интеграторов соединен с первым входом первого из элементов сравнения третьего блока элементов сравнения, выходы остальных интеграторов второго блока интеграторов соединены со вторыми входами соответствующих сумматоров третьего блока суш аторов,выход последнего из сумматоров третьего блока сумматоров соединен со вто- рым входом пятого элемента сравнения выходы остальных сумматоров третьего блока сумматоров соединен с первыми входами соответствуюш 1х элементов сравнения третьего блока элементов сравнения, входы элементов задержки соединены с первыми входами соответг ствуюш 1х элементов сравнения третьего блока элементов сравнения, выход первого из сумматоров четвертого блока сумматоров подключен ко входу первого из масштабирующих элементов тре ть- его блока масштабирующих элементов, выходы остальных сумматоров четверто-
171287
го блока сумматоров через соответствующие элементы сравнения третьего блока элементов сравнения подключены ко входам соответствующих-масштабирую щих элементов третьего -блока масщта- 5 бирующих элементов, входы элементов сравнения второго блока элерг ментов сравнения подключены к выходам соответствующих элементов сравнения первого блока элементов сравне О ния, вход.третьего масштабирующего элемента соединен с выходом первого фильтра низкой частоты, а его выход подключен ко второму входу первого из элементов сравнения первого блока 15 элементов сравнения-, второй вход вто105 18
рого сумматора соединен с выходом третьего элемента сравнения, а его выход подключен ко второму входу четвертого -элемента сравнения, вторые входы сумматоров 4eTBepToito блока сумматоров подключены к выходу третьего источника постоянного сигнала, входы масштабир ующих элементов четвертого блока масштабирующих элементов соединены с выходом щестого элемента срав- неция, второй .вход которого подключен к выходу первого фильтра низкой частоты , вход модели исполнительного органа без запаздьюания подключен к выходу первого сумматора .


| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Система управления объектом с избыточным числом управляющих воздействий, например, дуговой электропечью | 1987 |
|
SU1476432A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
Изобретение может быть использовано для построения систем управления техническим объектом. Цель изобретения состоит в повьппении точности управления объектом. Система управления объектом с несколькими управляющими входами содержит объект управления, блок исполнительных органов, блок масштабирующих элементов, блок датчиков локальных управляющих воздействий, блок фильтров низкой частоты, блок интеграторов, блоки сумматоров, блоки элементов задержки, блок элементов сравнения, исполнительный орган, датчик общего управ- лягсчцего воздействия, фильтры низкой частоты, датчик контролируемого внешнего воздействия, источники постоянного сигнала, элементы сравнения,блок адаптации, блок умножения, модель исполнительного органа без запаздывания, датчик выходного сигнала объекта и блок адаптивных экстраполяторов. 1 ил. (Л IND 00 
Редактор К.Волощук
Составитель А.Лащев
Техред Л.Сердюкова Корректор М.Пожо
Заказ 7715/50 Тираж 862 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
