Изобретение относится к унравлению стационарными объектами и может найти широкое применение при проектировании и испытаниях различных систем и объектов. .
Цель изобретения - повышение точности идентификации.
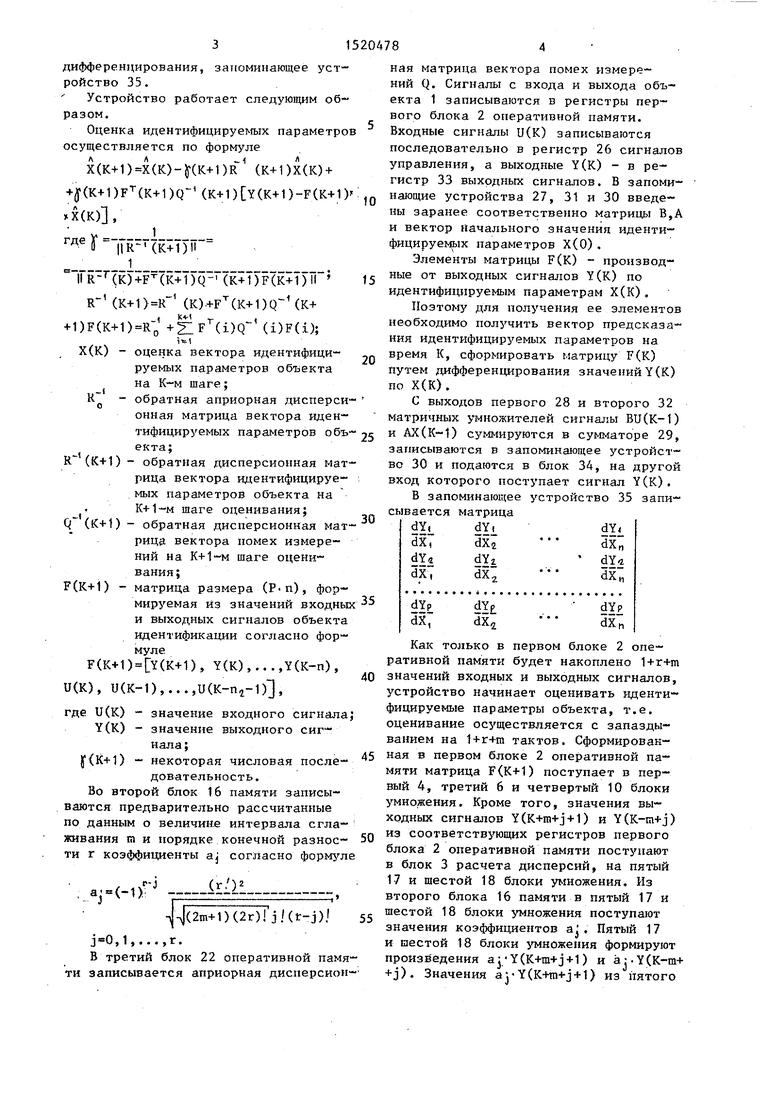
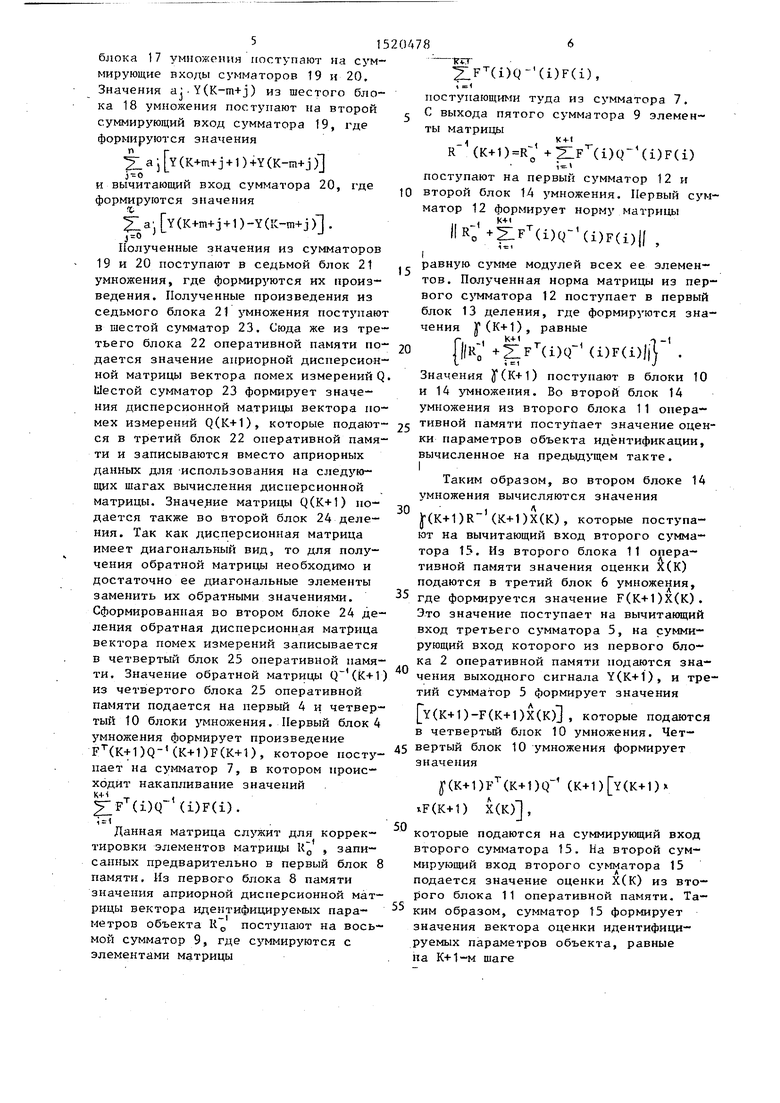
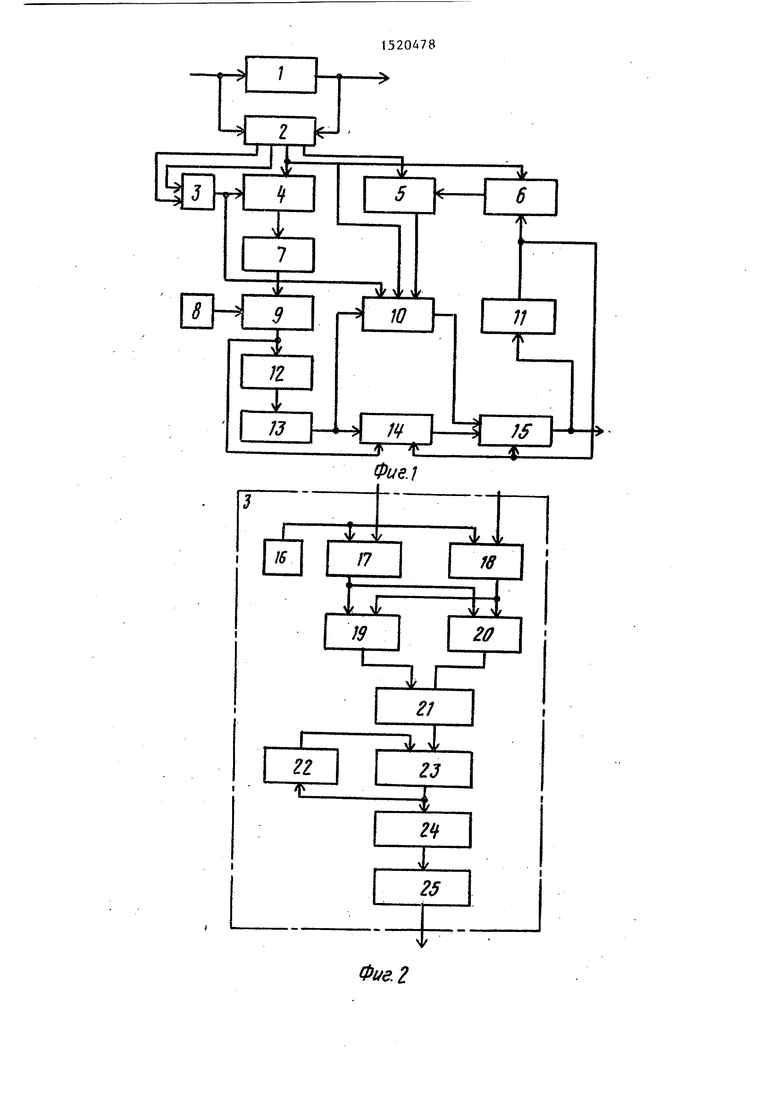
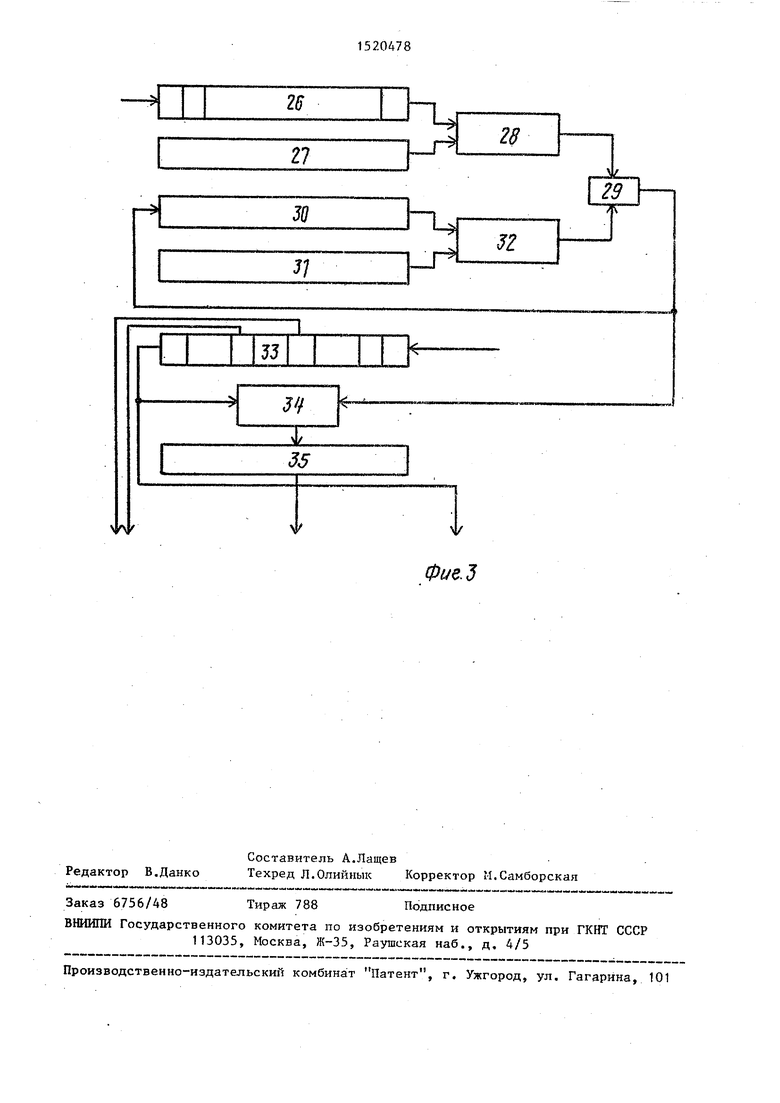
На фиг. 1 приведена функциональная схема предложенного устройства; на фиг. 2 - функциональная схема блока расчета дисперсий; на фиг. 3 - схема первого блока оперативной памяти.
Предлагаемое устройство содержит (фиг. 1) объект 1 идентификации, первый блок 2 оперативной памяти, блок 3 расчета дисперсий, первый блок 4 умножения, третий сумматор 5, третий блок 6 умножения, четвертый сумматор 7, первый блок 8 памяти, пятый сумматор 9, четвертый блок 10 умножения, второй блок 11 оперативной памяти, первый сумматор 12, первый
блок 13 деления, второй блок 14 умножения, второй сумматор 15.
Блок 3 расчета дисперсий содержит (фиг. 2) второй блок 16 пггмяти, пятый блок 17 умножения, шестой блок 18 умножения, восьмой сумматор 19, седьмой сумматор 20, седьмой блок 21 умножения, третий блок 22 оперативной памяти, шестой сумматор 23, второй блок 24 деления, четвертый блок 25 оперативной памяти.
Блок 2 оперативной памяти содержит (фиг. 3) регистр 26 сигналов управления, запоминающее устройство 27 элементов матрицы В, первый матричный умножитель 28, сумматор 29, запоминающее устройство 30 вектора идентифицируемых параметров, запоминающее устройство 31 элементов матрицы А, второй матричный умножитель 32, регистр 33 выходных сигналов, блок 34
сд
дифференцирования, запоминающее устройство 35.
Устройство работает следующим образом.
Оценка идентифицируемых параметро осуществляется по формуле
X(K+1)X(K)-)f(K+1)R (К+1)Х(К) + +J(K+1 )F(K+1 ) (К+1 )Y(K+1 )-F(K+1) X(K),
If |TR(K+T)ii
1
(K)+f (K+T)Q- (K+T)F(K+T)11
(K+1)R (K).+F (K+1)Q (K+ 4-1)F(K+1)R; +Z:F(i)Q (i)F(i);
X(K) - оценка вектора идентифицируемых параметров объекта на К-м шаге;
R - обратная априорная дисперси онная матрица вектора идентифицируемых параметров объ екта;
R (К+1) - обратная дисперсионная матрица вектора идентифицируемых параметров объекта на К+1-м шаге оценивания;
Q (К+1) - обратная дисперсионная матрица вектора помех измерений на К+1-М шаге оценивания;
F(K+1) - матрица размера (Р-п), формируемая Из значений входны и выходных сигналов объекта идентификации согласно формулеF(K+1) Y(K-H ), Y(K),.. . ,Y(K-n) ,
U(K), U(K-1),...,U(K-nj-l),
где U(K) - значение входного сигнала Y(K) - значение выходного сигнала;
{(K+l) - некоторая числовая последовательность.
Во второй блок 16 памяти записываются предварительно рассчитанные по данным о величине интервала сгла- живания Q и порядке конечной разнос- ти г коэффициенты aj согласно
)
r-J
(г,)
(2m-f1)(2r) j.(t-j)l
,1,...,r.
В третий блок 22 оперативной памяти записывается априорная дисперсион5
0
Q
5
0
ная матрица вектора помех измерений Q. Сигналы с входа и выхода объекта 1 записываются в регистры первого блока 2 оперативной памяти. Входные сигналы и(К) записываются последовательно в регистр 26 сигналов управления, а выходные Y(K) - в регистр 33 выходных сигналов. В запоминающие устройства 27, 31 и 30 введены заранее соответственно матрицы В,А и вектор начального значения иденти- фицируе1 1х параметров Х(0) ,
Элементы матрицы F(K) - производные от выходных сигналов Y(K) по идентифицируемым параметрам Х(К),
Поэтому для получения ее элементов необходимо получить вектор предсказания идентифицируемых параметров на время К, сформировать матрицу F(K) путем дифференцирования значений Y(K) по Х(К).
С выходов первого 28 и второго 32 матричных умножителей сигналы BU(K-l) и АХ(К-1) сз ммируются в сумматоре 29, записываются в запоминающее устройство 30 и подаются в блок 34, на другой вход которого поступает сигнал Y(K).
В запоминающее устройство 35 записывается матрица
0
0
5
5
Как только в первом блоке 2 оперативной памяти будет накоплено 1+гч-т значений входных и выходных сигналов, устройство начинает оценивать вденти- фицируемые параметры объекта, т.е. оценивание осуществляется с запаздыванием на 1+r+m тактов. Сформированная в первом блоке 2 оперативной памяти матрица F(K+1) поступает в первый 4, третий 6 и четвертый 10 блоки умножения. Кроме того, значения выходных сигналов Y(K+ro+j+1) и Y(K-m+j) из соответствующих регистров первого блока 2 оперативной памяти поступают в блок 3 расчета дисперсий, на пятый 17 и шестой 18 блоки умножения. Из второго блока 16 памяти в пятый 17 и шестой 18 блоки умножения поступают значения коэффициентов а. Пятый 17 и шестой 18 блоки т ножения формируют произведения (K+m+j + 1) и а:.у( ). Значения aj-Y(K+m+j + 1) из пятого
блока 17 умножения поступают на суммирующие входы сумматоров 19 и 20. Значения a;.Y(K-m+j) из шестого блока 18 умножения поступают на второй суммирующий вход сумматора 19, где формируются значения
Х а j Y (K+m+j +1) +Y (K-m+j )
-on
и вычитающий вход сумматора 20, где
формируются значения
Та; Y(K+m+j + 1)-Y(K-m+j)1 . ) Полученные значения из сумматоров
19 и 20 поступают в седьмой блок 21 умножения, где формируются их произведения. Полученные произведения из седьмого блока 21 умножения постз пают в шестой сумматор 23. Сюда же из третьего блока 22 оперативной памяти подается значение априорной дисперсионной матрицы вектора помех измеренийQ Шестой сумматор 23 формирует значения дисперсионной матрицы вектора помех измерений Q(K+1) которые подаются в третий блок 22 оперативной памяти и записываются вместо априорных данных для использования на следующих шагах вычисления дисперсионной матрицы. Значение матрицы Q(K+1) подается также во второй блок 24 деления. Так как дисперсионная матрица имеет диагональный вид, то для получения обратной матрицы необходимо и достаточно ее диагональные элементы заменить их обратными значениями. Сформированная во втором блоке 24 деления обратная дисперсионная матрица вектора помех измерений записывается в четвертый блок 25 оперативной памяти. Значение обратной матрицы Q (K+1 из четвертого блока 25 оперативной памяти подается на первый 4 и четвертый 10 блоки i мнoжeния. Первый блок 4 умножения формирует произведение F(K+1)Q- (K+1)F(K+O, которое поступает на сумматор 7, в котором происходит накапливание значений
к+н
F (i))F(i).
Данная матрица служит для корректировки элементов матрицы U , записанных предварительно в первый блок 8 памяти. Из первого блока 8 памяти значения априорной дисперсионной матрицы вектора идентифицируемых параметров объекта К поступают на восьмой сумматор 9, где сз ммируются с элементами матрицы
(i)(i)F(i),
;
поступающими туда из сумматора 7. С выхода пятого сумматора 9 элементы матрицы
.K-t-l
R (K-H)R; +2:F (i)Q-4i)F(i)
поступают на первый сумматор 12 и 0 второй блок 1А умножения. Первый сумматор 12 формир5 ет норму матрицы
II R
5
0
0
K+i
- ZlF CDQ- cDFCDlf ,
I
равную сумме модулей всех ее элементов. Полученная норма матрицы из первого о мматора 12 поступает в первый блок 13 деления, где формируются значения yCK+l), равные
Ок-ил -I
|к;+z:F (i)(i)F(i)iij ,
Значения У(К+1) поступают в блоки 10 и 14 умножения. Во второй блок 14 умножения из второго блока 11 опера- 5 тивной памяти поступает значение оценки параметров объекта идентификации,
вычисленное на предыдущем такте. I
Таким образом, во втором блоке 14
умножения вычисляются значения
0 1
jp(K+1)R (К+1)Х(К) , которые поступают на вычитающий вход второго сумматора 15, Из второго блока 11 оперативной памяти значения оценки Х(К) подаются в третий блок 6 умножения,
5 где формируется значение F(K+1)X(K). Это значение поступает на вычитающий вход третьего сумматора 5, на суммирующий вход которого из первого блока 2 оперативной памяти подаются значения выходного сигнала Y(K+1), и третий сумматор 5 формирует значения
Y(K+I)-F(K+I)X(K) , которые подаются в четвертый блок 10 умножения. Чет- 5 вертый блок 10 умножения формирует значения
y(K+i)F (K-n) (K+I)Y(K+I)X
F(K+1) Х(К),
которые подаются на суммирующий вход второго сумматора 15. На второй суммирующий вход второго сумматора 15 подается значение оценки Х(К) из второго блока 11 оперативной памяти. Та- КИМ образом, сумматор 15 формирует значения вектора оценки идентифицируемых параметров объекта, равные на К+1-М шаге
X(K+1)X(R)-|(K-H)R (K-f)X(K) +
+|C(K+i)F(K+i) (K+I)Y(K+I)-F(K+1)X(K) .
Синхронизация устройства осуществляется следующим образом.
В предварительно обнуленном устройстве производится запись предварительно -рассчитанных априорных данных. Так, например, во второй блок 16 памяти записываются рассчитанные по данным о величине интервала сглаживания и порядке конечной разности г коэффициенты а , а в тре- тий блок 22 оперативной памяти записывается априорная Дисперсионная матрица вектора помех измерений Q. В усройстве организован синхронный прин
цип накопления, вычисления и кране
ния информации и использован конвейерный режим работы. При этом режим накачки входной информации определяется временем выполнения процесса вычисления. С такой же скоростью выдаются результаты вычислений. В приведенной структуре производится обра- ботка сигналов в каждом блоке по мере их накопления во входных регистрах Таким образом, различные, элементы уст ройства осуществляют одновременно обработку информации по своим алгорит - мам с различным временем окончания работы и затем передают результаты решений на следующие блоки, работа которых начинается после получения предыдущих значений вычисленной информации .
Общая работа блоков синхронизована с генератором тактовых импульсов (не показан).
Предложенное устройство по сравнению с известным обладает более высокой точностью идентификации, обусловленной возможностью на каждом шаге радентификации уточнять значения диагональных элементов дисперсионной матрицы вектора идентифицируемых параметров объекта и.тем самым исключить
методические ошибки оценивания, свя- I
0
0
5
- 35
40
4550
заипые с неточностью задания априорной дисперсионной матрицы вектора идентифицируемых параметров объекта.
Формула изобретения
Адаптивное устройство для идентификации линейных объектов, содержащее блок расчета дисперсий, первый блок памяти, последовательно соединенные первый блок оперативной памяти и первый блок умножения, последов.а- тельно соединенные первый сумматор, первый блок деления, второй блок умножения, второй сумматор, второй блок оперативной памяти, третий блок умножения, третий сумматор и четвертый блок умножения, второй вход которого соединен с вторым входом третьего блока умножения и с первым входом первого блока умножения, .третий вход - с выходом первого блока деления, а выход - с вторым входом второг о сумматора, третий вход которого соединен с выходом второго блока оперативной памяти и с вторым входом второго блока умножения, второй выход первого блока оперативной памяти подключен к второму входу третьего сумматора, первый и второй информационные вхо- дь - соответственно к входу и выходу объекта, третий и четвертый выходы - соотв етственно к первому и второму входам блока расчета дисперсий, подключенного выходом к второму ВХОД5
первого блока умножения и четвертому входу четвертого блока умножения, отлича.ющееся тем, что, с целью повышения точности идентификации, в устройство введены четвертый и пятый сумматоры, четвертый сумматор подключен выходом к первому входу пятого сумматора, второй вход которого соединен с выходом первого блока памяти, а выход - с входом первого сумматора и с третьим входом второго блока умножения, вход седь- мого сумматора соединен с выходом первого блока умножения.
26
21
30
31
uH
2е
п
р
JE
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное устройство для идентификации линейных объектов | 1981 |
|
SU957168A1 |
| Адаптивный идентификатор | 1989 |
|
SU1647515A1 |
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| Идентификатор параметров стохастического динамического объекта | 1984 |
|
SU1255991A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| НЕЙРОПРОЦЕССОР, УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИЙ НАСЫЩЕНИЯ, ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И СУММАТОР | 1998 |
|
RU2131145C1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ПРИ ИЗМЕНЕНИИ РЕЖИМА РАБОТЫ ДВИГАТЕЛЕЙ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601367C1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| Устройство для магнитно-импульсной обработки деталей | 1973 |
|
SU470251A1 |
Изобретение относится к управлению стационарными объектами и может найти широкое применение при проектировании и испытаниях различных систем и объектов. Цель изобретения - повышение точности идентификации. Это достигается за счет введения четвертого и пятого сумматоров, позволяет на каждом шаге идентификации уточнять значения диагональных элементов дисперсионной матрицы вектора идентифицируемых параметров. 3 ил.
55
J /
f f
4V
Фие. 5
| Медич Дж | |||
| Статистически оптимальные линейные оценки и управление М,: Энергия, 1973, с | |||
| Искусственный двухслойный мельничный жернов | 1921 |
|
SU217A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
