(54) СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВ.ШНОГО УПРАВЛЕНИЯ СУДОВОЙ ГАЗОРЕВЕРСИВНОЙ ГАЗОТУРБИННОЙ УСТАНОВКОЙ
1
Изобретение относится к судостроению, в частности к системе дистанционного автоматизированного управления судовой газореверсивной газотурбинной установкой.
По основному авт. св. № 740607 известна система дистанционного автоматизированного управления судовой газореверсивной газотурбинной установкой, содержащая задатчик и датчик положения привода сектора газа, блок формирования сигнала задания привода сектора газа, связанный через блок логики с приводом сектора газа, блок и механизм управления реверсивными органами с датчиками конечных положений, связанные с эадатчиком направления вращения гребного вала и блоком логики, дополнительный блок формирования сигнала привода сектора газа, состоящий из блока уставки и блока временной развертки, связанных между собой через блок логики, другие входы которого связаны с задатчиком направления вращения гребного винта, датчиками конечных положений механизма реверса, датчиком положения привода сектора газа и выходом основного блока формирования сигнала, а выход - с приводом сектора газа 1.
Однако из-за неприспособленности к многопостовому управлению система не обладает высокой надежностью.
Цель изобретения - повышение надежности системы управления.
Цель достигается тем, что система снабжена установленными на выносном посту управления дополнительными задатчиками
10 направления вращения гребного вала и положения сектора газа, переключателем постов управления, блоками сравнения сигналов задатчиков положения сектора газа и направления вращения, подключенными к их выходам своим первым и вторым входами сумматором, третий вход которого соединен с переключателем постов управления, подключенными к выходу сумматора реле коммутации каналов управления нагрузкой и . реле коммутации каналов управления реверсивным органом, блоком переключения цепей управления, вспомогательными механизмами, подключаемым выходом к станции управления газотурбинным двигателем, одним из входов соединенным с выходом суммато|)а, и двумя другими - с пультами управЛ1ми-1я вспомогательными механизмами обоих постов управления, при этом выходы обоих реле коммутации подключены соответственно ко вхсздам блока формирования сигнала и блока „чогики.
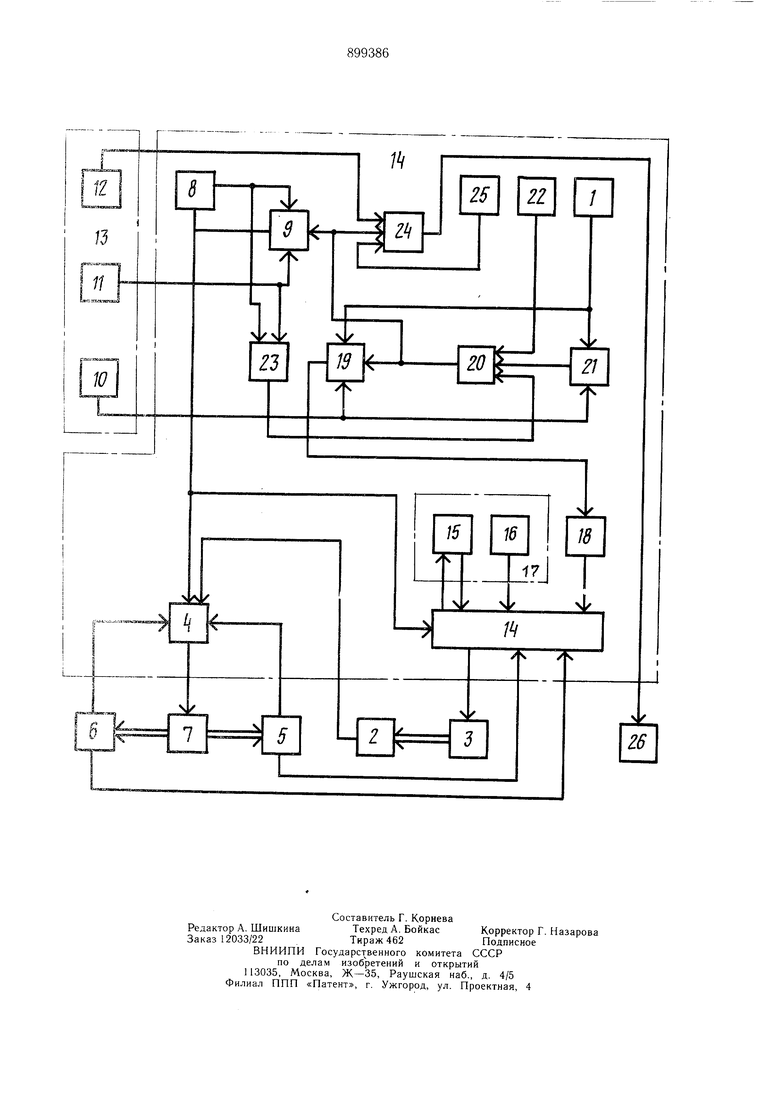
На чертеже схематически изображена п р e;i, а г а е м аи с и сте м а.
Система включает в себя задатчик 1 и датчик 2 положения привода 3 сектора газа, связанный с выходом датчика 2 одним своим входом блок 4 управления реверсом, вто)К)й и третий выходы которого подключены к датчикам 5 и 6 конечных положений механизма 7 управления реверсом, задатчик 8 направления врап1ения, связанный через реле 9 коммутации каналов управления реверсивными органами с четвертым входом блока, 4. Система содержит также донолнительные задатчики 10 и 11, соответственно, положения привода сектора газа и направлегшя вращения гребного вала, и пульт 12 управлепия вспомогательными механизмами, установленные на выносном посту 13 управления. Выходы датчиков 5 и 6 подключены также к одним входам блока 14 логики, выход которого связан с приводом 3, а другие входы - с выходами блока 15 временной развертки и блока 16 уставок, составляющих дополнительный формирователь 17, и выходом формирователя 18 сигналов, вход которого подключен к выходу реле i9 коммутации команд управления наг{)узкой, входы которого еоединены с выходами задатчиков 1 и 10 и выходом сумматора 20, ко входам которого подключены выходы блока 21 сравнения, переключателя 22 постов и блока 23 сравнения, входы которого соединены с выходами задатчиков 8 и 11. Выход реле 9 подключен с одним из входов блока 24 переключения цепей управления, другие входы которого соединены с выходами нультов 12 и 25 управления вспомогательны.ми механизмами, а выход пред,назначен для подключения к станции 26 управления газотурбинным двигателем.
Система работает следующим образом.
Управление газореверсивной газотурбинной установкой (ГТУ) осуществляется с основного или выносного поста 13 управления.
Для перевода управления ГТУ с одного поста па другой переключатель 22 каналов управления необходимо установить в положение, соответствующее требуемому посту. При этом сигнал с выхода переключателя 22 поступает на вход сумматора 20, на два других входа которого поступают соответственно сигналы с выхода блока 21 сравнения уровня сигналов задатчиков 1 и 10 положения привода сектора газа и с выхода блока 23 сравнения положения задатчиков 8 и 11 направления вращения гребного вала.
При равенстве уровня сигналов от задатчиков 1 и 10 в первом случае и соответствии положений задатчиков 8 и 11 во втором случае, с выхода сум.матора 20 команда поступает на соответствующие входы реле 19
коммутации каналов управления нагрузкой, реле 9 коммутации каналов управления реверсивными органами, блока 24 переключения цепей вспомогательными механизмами, в которых происходит одновременное переключение каналов и цепей управления, при
этом на пультах 25 и 12 управления горит постоянным свечением табло, сигнализируя о переключении постов управления.
В случае, если переключение постов управления производить при рассогласовании
уровней сигналов от задатчиков 1 и 10 или при рассогласовании положения задатчиков 8 и 11, указанное табло горит мигающим светом, обеспечивая сигнализацию несоответствия.
Для устранения несоответствия необходимо, используя показания индикаторов уровня сигналов задатчиков 1 и 10 и положения задатчиков 8 и 11, произвести согласование задающих органов до момента прекращения мигания табло, т.е. до момента
начала горения его ровным светом, что сигнализирует о состоявщемся переключении каналов и цепей управления.
Рассмотрим прохождение сигналов только при управлении с основного пульта, так как при управлении с выносного пульта 13
осуществляется аналогично.
Изменение режима работы газотурбинной установки осуществляется задатчиком 1 (или 10).
Сигнал от задатчика 1 поступает на вход
реле 19 коммутации каналов управления нагрузкой, с выхода которого проходит на вход блока 18 формирования сигнала, где происходит формирование необходимой временной программы на сброс и наброс мощности для сигнала, поступающего на вход
привода 3 сектора газа через блок 14 логики. Последний подключает на вход привода 3 управляющий сигнал с блока 18 при отсутствии команды изменения направления вращения гребного вала.
Распознование команды на реверс обеспечивается за счет подачи на выход блока 14 сигналов от задатчика 8 (или 11) и датчиков 5 и 6 конечных положений механизма 7 управления реверсом.
Одновременно, при отсутствии сигнала
реверса выход блока 18 через блок 14 логики подключается на блок 15 временной развертки дополнительного блока 17 формирования, выход которого отслеживает за сигналом блока 18 формирования сигнала.
Перемещение механизма управления реверса с переднего на задний вход осуществляется по сигналу блока 4 управления реверсом по несовпадению заданного направления вращения от задатчика 8(11) и дат-чиков 5 и 6 при наличии разрешающего сигнала от датчика 2 положения привода 3 сектора газа.
При перестановке задатчика 8 (11) из положения переднего хода на задний ход или наоборот блок 14 логики отключает сигнал с выхода блока 18 от входа привода 3 сектора газа и выхода блока 15 временной развертки, одновременно подключая выход блока 16 установки ко входу блока 15 временной развертки и выход последнего - на вход привода 3. После отработки привода 3 сектора газа сброса мощности до уровня, определяемого датчиком 2 положения, блок 4 управления реверсом формирует сигнал на перестановку механизма 7.
, По сигналу от датчика 5 или 6, зафиксировавщему выполнение команды механизмом 7, блок 14 логики подключает выход блока 18 на вход привода 3, обеспечивая перемещение сектора газа в положение, заданное задатчиком 1(10) при среверсированном направлении вращения гребного вала.
Одновременно отключаются блок 16 установки от входа блока 15 развертки и выход последнего от входа привода 3.
Если команда на реверс поступает ниже настройки датчика 2 положения привода 3, подключение дополнительного блока 17 формирования сигнала не производится.
Использование предлагаемой системы позволяет оптимизировать процесс реверса газореверсивного газотурбинного двигателя за счет выбора соответствующей программы блока 15 временной развертки и величины уставки от блока 16 уставки, т.е. за счет настройки параметров дополнительного блока формирования сигнала для реверса, обеспечить высокую надежность и высокое качество управления реверсивными органами газореверсивного газотурбинного двигателя, что влияет на улучшение маневренных характеристик судна, повысить живучесть системы с сохранением указанных достоинств и, как следствие, - живучесть судна за счет обеспечения более оперативного переключения каналов и цепей управления газореверсивной газотурбинной установкой с одного поста управления на другой.
Формула изобретения
Система дистанционного автоматизированного управления судовой газореверсивной газотурбинной установкой по авт. св. № 740607, отличающаяся тем, что, с целью повышения надежности, она снабжена установленны.ми на выносном посту управления Лополните.льны.ми задатчиками направления вращения гребного вала и положения сектора газа, переключателем постов управления, блоками сравнения сигналов задатчиков положения сектора газа и направления вращения, подключенными к их выходам своим первым и вторым входами сумматором, третий вход которого соединен с переключателем постов управления, подключенными к выходу сумматора реле, коммутации каналов управления нагрузкой и реле ком.мутации каналов управления реверсивным органов, блоком переключения цепей управления вспо.могательными механизмами, подключае.мым выходо.м к станции управления газотурбинным двигателем, одним из входов соединенным с выходом сумматора, а двумя другими - с пультами управления вспомогательными механизмами обоих постов управления, при этом выходы обоих реле коммутации подключены соответственно ко входам блока формирования сигнала
и блока логики.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
№ 740607, кл. В 63 Н 21/16, В 63 Н 21/22,
16.1 1.78 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного автоматизированного управления судовой газореверсивной газотурбинной установкой | 1978 |
|
SU740607A1 |
| Судовая газореверсивная газопаро-ТуРбиННАя уСТАНОВКА | 1979 |
|
SU816873A1 |
| Система управления главной судовой дизельной установкой при реверсировании | 1989 |
|
SU1676926A1 |
| Устройство управления реверсом многодвигательной газотурбинной судовой установки с реверсивным редуктором | 1991 |
|
SU1830015A3 |
| Устройство для формирования сигнала перегрузки газотурбинного агрегата | 1980 |
|
SU934062A1 |
| Электропривод с автономным источником питания | 1984 |
|
SU1236594A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД С НЕСКОЛЬКИМИ ПОСТАМИ УПРАВЛЕНИЯ | 2003 |
|
RU2256105C1 |
| Устройство для моделирования судовой газотурбинной установки | 1980 |
|
SU938290A2 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| Способ и устройство управления реверсированием тяги газотурбинного двигателя самолёта | 2024 |
|
RU2828300C1 |