(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОВОРОТОМ РОТОРНОЙ СТРЕЛЫ ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| Устройство для автоматического управления роторной стрелой экскаватора | 1983 |
|
SU1162902A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 1968 |
|
SU207966A1 |
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
1
Изобретение относится к автоматизации управления технологическими процессами на карьерах, а именно к устройствам для управления роторным экскаватором.
Известны устройства для автоматического формирования угла откоса уступа роторным экскаватором, включающее блок вычисления угла поворота роторной стрелы, в функции угла подъема и ширины заходки уступа и ключ выключения привода поворота 1 .
Однако эти устройства не учитывают влияние динамики привода поворота на качество формирования линии откоса уступа.
Наиболее близким к предлагаемому по технической сущности является устройство для программного управления поворотным механизмом роторного экскаватора, содержащее датчик угла поворота роторной стрелы, датчик угла подъема роторной стрелы, синусный преобразователь угла поворота, косинусный и синусный преобразователь угла подъема, блок задания щирины заходки, блоки масштабирования котангенса угла откоса уступа, эксцентриситета и длины роторной стрелы, блоки перемножения и суммирования, нуль-орган, следящий привод поворота ротора, состоящий из блока Ьравнения, привода и элементов управления им, датчика угловой скорости поворота ротора, блока задания скорости привода поворота ротора и соответствующие связи 2.
Недостатком этого устройства является
« невысокая точность формирования угла откоса уступа в виду того, что его структурой не учитывается выбег привода поворота, т. е. инерционность привода при отключении. При этом отклонение фактического угла поворота от вычисленного достиtoгает 5-7°. Некачественное формирование линии откоса сопровождается осыпями горной породы, определяет необходимость непрерывного выравнивания щирины заходки по длине разрабатываемого слоя, при этом J5 ковщи заполняются неполностью, приходится делать лищние маневры стрелой.
Цель изобретения - повыщение точности управления.
Поставленная цель достигается тем, что устройство снабжено ключом формирования 20 команды на торможение привода поворота ротора, блоком запоминания сигнала текущего значения линейной скорости поворота ротора, блоком интегрирования, вторым
блоком суммирования, детектором нуля, ключом управления приводом поворота ротора, блоком определения линейной скорости поворота ротора, блоками задания эксцентриситета и длины роторной стрелы, блоком определения радиуса резания, входы которого соединены с косинусным преобразователем угла подъема роторной стрелы и блоками задания эксцентриситета и длины роторной стрелы, а выходы подключены к одному из входов блока определения линейной скорости поворота ротора, к другому входу которого подключен датчик угловой скорости поворота ротора, а к выходу к блоку сравнения привода поворота ротора и блок запоминания линейной скорости поворота ротора, выход которого подключен ко второму блоку суммирования, к первому входу ключа управления приводом поворота ротора и через последовательно соединенные блок интегрирования, второй блок суммирования, детектор нуля - ко второму входу ключа управления приводом поворота ротора, третий вход которого соединен с выходом блока интегрирования, четвертый - с выходом блока задания скорости привода поворота ротора, а выход ключа управления приводом поворота ротора соединен с блоком сравнения привода поворота ротором, причем ключ формирования команды на торможение привода поворота ротора подключен входом к нуль-органу, а выходами - ко входам блоков интегрирования, задания и запоминания линейной скорости привода поворота ротора.
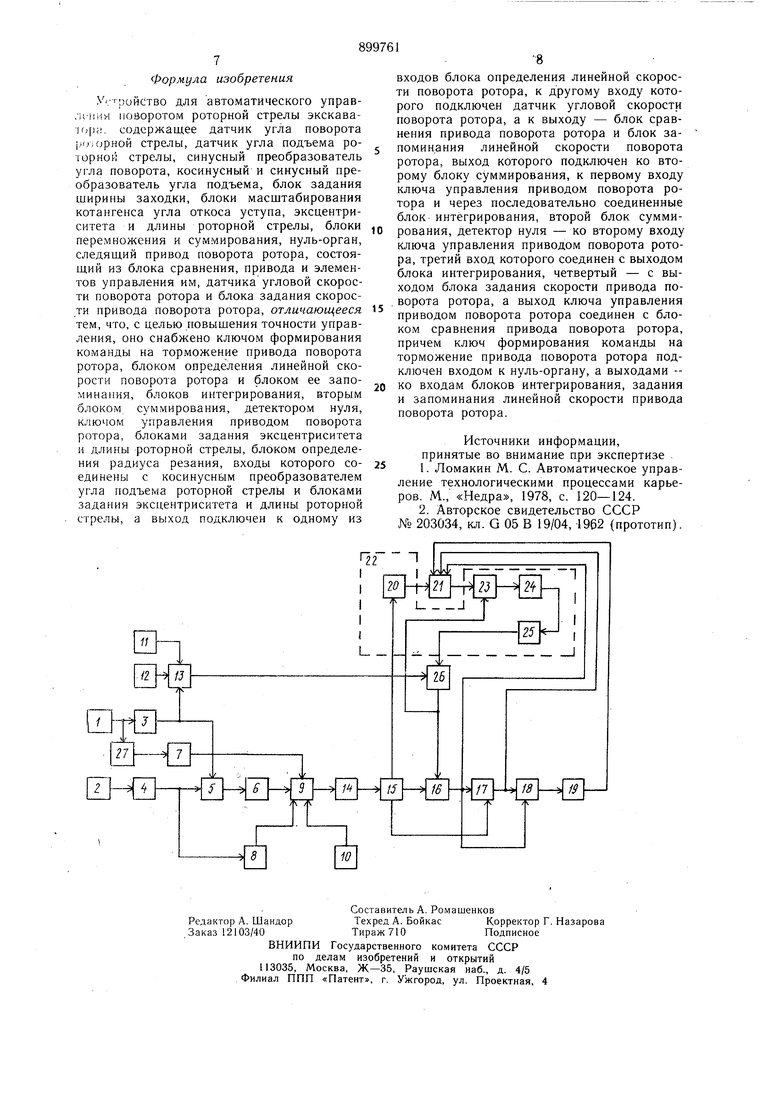
На чертеже представлена блок-схема устройства.
Устройство содержит датчик 1 угла подъема роторной стрелы, датчик 2 угла поворота роторной стрелы, косинусный преобразователь 3 угла подъема, синусный преобразователь 4 угла поворота, блок 5 перемножения, блок 6 масштабирования длины роторной стрелы, блок 7 масштабирования эксцентриситета роторной стрель, блок 8 масштабирования котангенса угла откоса уступа, первый блок 9 суммирования, блок 10 задания ширины заходки, блок 11 задания эксцентриситета роторной стрелы, блок 12 задания длины роторной стрелы, блок 13 определения радиуса резания, нульорган 14, ключ 15 формирования команды на торможение привода поворота ротора, блок 16 запоминания сигнала текущего значения линейной скорости поворота ротора, блок 17 интегрирования, второй блок 18 суммирования, детектор нуля 19, блок 20 задания скорости привода поворота ротора, ключ 21 управления приводом поворота ротора, следящий привод 22 поворота ротора, состоящий из блока 23 сравнения, привода и элементов управления им 24, датчика 25 угловой скорости поворота ротора, блок 26 вычисления линейной скорости поворота
ротора, синусный преобразователь 27 угла подъема.
Датчик 1 угла подъема роторной стрелы подключен к косинусному и синусному преобразователям 3 и 27 угла подъема, и датчик 2 угла поворота роторной стрелы
к синусному преобразователю 4 этого угла. Синусный преобразователь 27 угла подъема через блок 7 масштабирования эксцентриситета роторной стрелы подключен к первому блоку 9 суммирования, к которому через последовательно соединенные блок 5 перемножения и блок 6 масштабирования роторной стрелы подключены также синусный преобразователь 4 угла поворота и косинусный преобразователь 3 угла подъема роторной стрелы. Кроме того, первый блок 9
суммирования соединен с блоком 10 задания ширины заходки и блок 8 масштабирования котангенса угла откоса уступа, к которому подключен синусный преобразователь 4 угла поворота роторной стрелы. Выход блока 9 суммирования соединен с нуль-органом 14.
Входы блока 13 определения радиуса резания соединены с косинусным преобразователем 3 угла подъема с блоками 11 и 12 задания эксцентриситета и длины роторной стрелы, а выход подключен на вход
5 блока 26 определения линейной скорости поворота ротора, подключенного другим входом к датчику 25 угловой скорости следящего привода поворота и выходом к блоку 23 сравнения следящего привода поворота и управляющему входу блока 16 запоминания сигнала текущего значения линейной скорости поворота ротора, соединенного другим входом с ключом 15 формирования команды на торможение привода поворота, вход которого соединен с нуль-органом 14, а управляющие выходы ключа 15 подключены к управляющим входам блока 20 задания скорости привода поворота, блока 16 запоминания линейной скорости поворота ротора, и блока 17 интегрирования, корректирующий вход которого подключен к выходу
0 блока 16 запоминания значения линейной скорости поворота ротора, соединенного этим же выходом со вторым блоком 18 суммирования и с первым входом ключа 21 управления приводом поворота, включенного в следящий привод 22 поворота ротора между блоком 20 задания скорости привода поворота и последовательно соединенными блоком 23 сравнения, приводом поворота и элементами управления 24 и датчиком 25 угловой скорости поворота ротора. Выход
JJ блока 17 интегрирования через последовательно соединенные второй блок 18 суммирования и детектор нуля подключен ко второму входу ключа 21, третий вход которого соединен непосредственно с выходом бло.ка 17 интегрирования.
Устройство работает следующим образом.
В момент срабатывания нуль-органа 14,
что соответствует вычислению заданного угла поворота роторной стрелы для заданных параметров забоя и экскаватора, срабатывает ключ 15, который включает в работу блок 17 интегрирования, блок 16 запоминания сигнала текущего значения линейной скорости ротора и отключает блок 20 задания скорости привода поворота. При этом выходной сигнал блока 16, который соответствует линейной скорости поворота ротора, прикладывается одновременно на входы блока 17 интегрирования, блока 18 суммирования и через ключ 21 управления приводом поворота ко входу следящего привода 22. Таким образом, входной сигнал следящего привода после момента начала торможения равен выходному сигналу блока задания скорости привода поворота до момента начала торможения. Этим исключается возможность появления в системе привода резких динамических нагрузок, вызванных несоответствием по величине задающего сигнала и сигнала обратной связи по скорости. Постоянный сигнал блока 16 интегрируется блоком 17. Выходной сигнал блока 17 изменяется по линейному закону и через ключ 21 также прикладывается ко входу следящего привода 22, но с противоположным знаком, обеспечивая плавное уменьщение задающего сигнала, т. е. торможение привода поворота. Одновременно этот же сигнал поступает на блок 18 суммирования. Момент, когда выходные сигналы блоков 16 и 17 сравняются, т. е. когда выходной сигнал блока 18 и скорость следящего привода поворота станут равными нулю, определяется детектором нуля 19, который, сработав, отключает через ключ 21 выходы блоков 16 и 17 от входа привода поворота, заканчивая процесс торможения. В процессе разработки забоя роторным экскаватором изменяется радиус резания, который зависит от угла наклона роторной стрелы и определяется по формуле: RP t+ Lcoscp,, (I) где Л - соответственно угол подъема, эксцентриситета и длина роторной стрелы, включая радиус ротора Эта зависимость реализуется блоками 13, 11, 12 и 3. Результат вычисления в виде электрического сигнала из блока 13 подается в блок 26 определения линейной скороети поворота ротора, где происходит умножение на него выходного сигнала датчика 25 угловой скорости. Необходимость такого вычисления определяется тем, что в процессе остановки привода поворота необходимо обеспечить равный путь перемещения ротора в горизонтальной плоскости с начала момента торможения при всех .углах подъема роторной стрелы, что обеспечит качественное формирование линии откоса уступа. Согласно описанному выше принципу работы устройства, выходной сигнал блока 18 суммирования, а следовательно, входной сигнал следящего привода поворота изменяется по закону U Uo-- JUodt Ue- t гдеи -сигнал, пропорциональный линейной скорости поворота ротора в момент начала торможения; RC - входное сопротивление и емкость обратной связи блока интегрирования. В момент основки привода U Uo, а следовательно время торможения to RC. Однако задачей устройства является обеспечить для всех углов подъема роторной стрелы равный путь торможения S , гдеУо - линейная скорость поворота ротора в момент начала торможения; а - замедление привода. Так как скорость привода в момент окончания торможения становится равной нулю, то а Vo/t и, следовательно. S Если в приведенном выше выражении (2) входное сопротивление интегратора изменять обратной пропорционально VQ, т. е. выходному сигналу блока 16, то: S-4-Vo -Ц ., где К - коэффициент пропорциональности; RO - начальное входное сопротивление блока интегрирования. При этом условии путь торможения не зависит от начальной скорости торможения. В устройстве этот вопрос решается корректирующей связью между блоками 16 и 17, которая изменяет входное сопротивление блока 17 обратно пропорционально выходному сигналу блока 16. Такая коррекция легко выполняется, если, например, в качестве входного сопротивления блока интегрирования использовать полевой транзистор.. Введенные в устройство элементы обеспечивают определение фактической линейной скорости поворота ротора на момент торможения и его торможение на постоянном пути перемещения, не зависимом от угла подъема роторной стрелы. Это позволяет исключить влияние на формирование линии откоса уступа выбега привода и радиуса резания, изменяющегося при изменении угла подъема роторной стрелы. Применение предлагаемого устройства позволяет повысить точность управления прворотом ротора, увеличить производительность роторного экскаватора за счет сокращения времени на вспомогательные операции, обусловленные некачественным формированием линии откоса уступа.
Формула изобретения
У .-гройство для автоматического управ, поворотом роторной стрелы экскаваюр;;. содержащее датчик угла поворота ,10рной стрелы, датчик угла подъема роторной стрелы, синусный преобразователь угла поворота, косинусный и синусный преобразователь угла подъема, блок задания ширины заходки, блоки масштабирования котангенса угла откоса уступа, эксцентриситета и длины роторной стрелы, блоки перемножения и суммирования, нуль-орган, следящий привод поворота ротора, состоящий из блока сравнения, привода и элементов управления им, датчика угловой скорости поворота ротора и блока задания скорости привода поворота ротора, отличающееся тем, что, с целью повышения точности управления, оно снабжено ключом формирования команды на торможение привода поворота ротора, блоком определения линейной скорости поворота ротора и блоком ее запоминапия, блоков интегрирования, вторым блоком суммирования, детектором нуля, ключом управления приводом поворота ротора, блоками задания эксцентриситета и длины роторной стрелы, блоком определения радиуса резания, входы которого соединены с косинусным преобразователем угла подъема роторной стрелы и блоками задания эксцентриситета и длины роторной стрелы, а выход подключен к одному из
входов блока определения линейной скорости поворота ротора, к другому входу которого подключен датчик угловой скорости поворота ротора, а к выходу - блок сравнения привода поворота ротора и блок запоминания линейной скорости поворота ротора, выход которого подключен ко второму блоку суммирования, к первому входу ключа управления приводом поворота ротора и через последовательно соединенные блок интегрирования, второй блок суммирования, детектор нуля - ко второму входу ключа управления приводом поворота ротора, третий вход которого соединен с выходом блока интегрирования, четвертый - с выходом блока задания скорости привода по. ворота ротора, а выход ключа управления приводом поворота ротора соединен с блоком сравнения привода поворота ротора, причем ключ формирования команды на торможение привода поворота ротора подключен входом к нуль-органу, а выходами ко входам блоков интегрирования, задания и запоминания линейной скорости привода поворота ротора.
Источники информации, принятые во внимание при экспертизе
№ 203034, кл. G 05 В 19/04, 1962 (прототип).
