блока сравнения, второй выход ключа нения, к третьему и четвертому входам обратной свяэн по скорости через ин- -которого подключены соответственно вертор обратной связн по скорости выходы блока масштабирования сигнала подключен к второму входу блока срав- задания и ключа отсечки.
1162902
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
| Устройство для управления роторным экскаватором | 1982 |
|
SU1059073A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство автоматического управления роторным экскаватором | 1982 |
|
SU1097757A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
| Асинхронный частотно-регулируемый электропривод | 1985 |
|
SU1277347A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНОЙ СТРЕЛОЙ ЭКСКАВАТОРА, содержащее блок вычисления предельного угла поворота роторной стрелы, блок торможения привода, блок задания скорости, блок сравнения, выход которого подключен к приводу с элементами управления, датчик угловой скорости ротора, соединенный с первым входом блока вычисления линейной скорости поворота ротора, и детектор нуля, о т л и - чающее ся тем, что, с целью повьшения качества управления, оно снабжено блоком масштабирования сигнала задания, инверторами отсечки и обратной связи по скорости-, ключами обратной связи по скорости и отсеч ки, компараторами скорости изменения сигнагеа задания, максимальной и минимальной нагрузок, блоком выделения модуля сигнала, блоком дифференцирования, блоком формирования отсечки, элементами И и ИЛИ, датчиком нагрузки привода ротора, выход которого подключен через компараторы минимальной и максимальной нагрузок к первым входам соответственно элементов И или ИЛИ, а также через блок формирования отсечки к инвертору отсечки и к первому входу ключа отсечки, к второму входу которого подключен выход инвертора отсечки, первый и второй выходы блока вычисления предельного угла поворота роторной стрелы подключены соответственно к второму входу блока вычисления линейной скорости поворота ро(Л тора и к первому входу блока торможения привода к второму входу которого подключен выход блока задания скоростей, выход блок торможения привода подключен непосредственно к первому входу блока масштабирования сигнала задания, а также через де тектор нуля к управляющему входу ключа отсечки и через последовательно соединенные блок выделения модуля сигнала, блок дифференцирования и компаратор скорости изменения сигнала задания к второму входу элемента ИЛИ, выход которого подключен к второму входу элемента И, выход элемента И подключен к второму входу блока масштабирования сигнала задания и к управлякицему входу ключа обратной связи по скорости, к первому входу которого подключен выход блока вычисления линейной скорости поворота рото,ра, первый выход ключа обратной связи по скорости подключен к первому входу
Изобретение относится к автоматизации управления технологическими процессами на карьерахj а именно к устройствам для управления роторным экскаватором.
Целью изобретения.является повыше- кие качества управления,
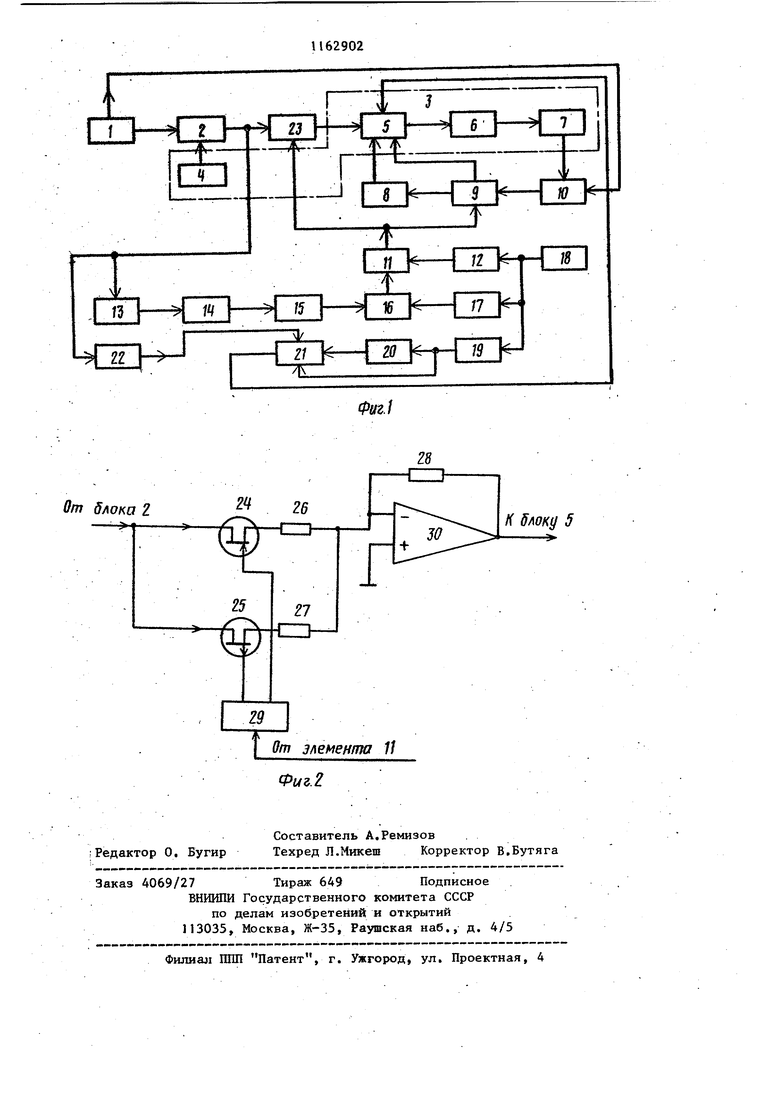
Ва фкг. представлена блок-схема предлагаемого устройства; на фиг.2 принципиальная схема блока масштабирования сигнала задания.
Устройство содержит блок 1 вычисления предельного угла поворота роторной стрелы, блок 2 торможения привода, следящий привод 3 поворота, включающий блок 4 задания скорости, блок 5 сравнения, привод 6 с элементами управления, датчик 7 угловой скорости, инвертор 8 обратной связи по скорости, ключ 9 обратной связи по скорости, блок 10 вычисления линейной скорости поворота ротора, эле7 мент И П, компаратор 12 минимальной нагрузки, блок 13 выделения модуля сигнала, блок 14 дифференцирования, компаратор 15 скорости изменения сигнала задания, элемент ИЛИ 16, компаратор 17 максимальной нагрузки, датчик 18 нагрузки привода ротора, блок 19 формирования отсечки, инвертор 20 отсечКи, ключ 2 отсечки, детектор 2 нуля, блок 23 масштабирования сигнал задания.
I Выход датчика 18 нагрузки подклю :чен к входам блока 19 формирования о.тсечки, компаратора 12 максимальной : нагрузки и входу компаратора 17 минимальной нагрузки, выход .которого связан с одним из входов элемента ИЛИ 16, второй вход которого подключен к выходу компаратора 15 скорости изменения сигнала задания, а выход соединен с одннм из выходов элемента НИ, другой вход которого подключен к выходу компаратора 12 минимальной нагрузки, а выход подсоединен к управляющему входу ключа 9 обратной связи по скорости и к одному из входов блока 23 масштабирования сигнала задания. Выход блока масштабирования сигнала зада5 ия связан с одним из входов блока 5 сравнения, другой вход которого через инвертор 8 обратной связи по скорости связан с одним из выходов ключа 9 обратной связи По скорости, управляемый вход которого подсоединен к выходу блока 10 вычисления линейной скорости поворота ротора, а другой выход соединен с соответствующим входом блока 5 сравнения, один из входов которого связан с выходом ключа 21 отсечки, а выход через привод 6 - с элементами управления им
Датчик 7 угловой скорости связан с одним мз входов блока 10 вычисления линейной скорости поворота ротора, другой вход которого подключен к одному из выходов блока 1 вычисления угла поворота роторной стрелы, другой выход которого подсоединен к управлякйцему входу блока 2 торможения привода, управляемый вход которого связан с выходом блока 4 задания скорости, а выход подключен к другому входу блока 23 масштабирования сигнала задания и через блок 13 выделения модуля сигнала, блок I4 дифференцирования - к входу компаратора 15 скорости изменения сигналазадания и к входу детектора 22 нуля, выход которого подсоединен к управ.ляющему входу ключа 21 отсечки, один из управляющих входов которого через инвертор 20 отсечки связан с выходом блока 19 формирования отсечки, к коTopojiy подключен другой управляющий вход ключа 21 отсечки.
Устройство работает следующим образом.
Ключ 9 обратной связи по скорости управляет блоком обратной связи по скорости следящего привода 3 поворот В одном из положений этого ключа выходной сигнал блока 10 вычисления линейной скорости поворота ротора, прёдставлякядий собой произведение сигнала, пропорционального угловой скорости привода поворота, и сигнала пропорционального радиусу резания, . подается непосредственно на один из входов блока 5 сравнения, благодарячему система управления приводом поворота оказывается замкнутой жесткой отрицательной обратной связью по скорости поворота ротора. Такая система обладает высокой точностью и быстродействием при отработке сигналов задания, поступающих с выхода блока 23 масштабирования сигнала за- Дания, и в момент защиты привода ро- тора от чрезмерных нагрузок, т.е. пр работе блока 19 отсечки. Входной сигнал блока 23 масштабирования сигнала задания формируется блоком 2 торможения привода в момент приближения ротора к,линии, образующей боковой уступ, или блоком 4 задания скорости при управлении скорос тью поворота роторной стрелы вручную машинистом. Факт изменения этих сигналов определяется блоком 1А дифференцирования. Так как сигналы задани разнополярны, то перед дифференцированием они проходят через блок 13 вы деления модуля сигнала. Когда темп изменения сигнала задания превышает некоторый уровень, установленный на компараторе 15 скррости изменения си нала задания, компаратор срабатывает и на его входе элемента ИЛИ 16 появляется единичный сигнал. Такой же сигнал появляется на втором входе эл мента ИЛИ, когда нагрузка на приводе ротора превышает допустимый уровень и срабатывает компаратор 17 максимал ной нагрузки. Появление хотя бы на одном из входов элемента ИЛИ единичного сигнала приводит к появлению та кого же сигнала на его выходе, и, следовательно, на одном иэ входов элемента И П. I На втором входе этого элемента сигнал логической единицы появляется при срабатывании компаратора 12 минимальной нагрузки, что происходит при наличии на приводе некоторой минимальной нагрузки. Таким образом, если изменяется сигнал задания приво да поворота и при этом осуществляетс выемка горной массы, . привод ротора нагружен или нагрузка на приводе ротора превышает некоторый допустимый уровень, то на выходе элемента И появляется единичный сигнал, который приводит ключ 9 в такое положение, при котором привод поворота замыкается отрицательной обратной связью по скорости. В процессе разрушения забоя ротором, когда нагрузка на его приводе не превышает допустимого предела и при этом сигнал задания, не изменяется, систему управления приводом поворота целесообразно разомкнуть или замкнуть небольшой положительной обратной связью, что обеспечивает работу привода поворота на более мягкой механической характеристике, что, в свою очередь, способствует снижению. амплитуды колебаний усилий в приводах и конструктивных элементах роторного экскаватора. Таким же образом система управления должна работать при отсутствии нагрузки на приводе ротора, что исключает появление колебательных процессов в приводе поворота из-за наличия больших зазоров в зубчатом зацеплении поворотного круга, В рассмотренных случаях сигнал на выходе элемента И 11 равен нулю и ключ 9 находится в таком положении, при котором рыходной сигнал блока 10 подается на блок 5 сравнения через инвертор 8. Коэ.ффициент передачи инвертора выбирается таким, чтобы коэффициент электромеханической .. связи привода поворота для данного типа экскаватора имел максимальное значение, В этом случае максимальным является демпфирование колебаний в приводах и конструктивных элементах роторного экскаватора. Каждой структуре системы управления следящего привода поворота должен соответствовать определенный масштаб сигнала задания, при котором статическая ошибка системы по заданию была бы равной нулю. Эта задача вустройстве .решается блоком 23 масштабирования сигнала Задания, который, в частном случае, представляет собой набор резисторов с последовательно выключенными транзисторными ключами, управляемыми выходными сигналами логического элемента И 11, Отсечка по нагрузке привода ротора в системе управления приводом поворота действует как отрицательная обратная связь, которая включается в работу, когда нагрузка на приводе ротора, измеряемая датчиком 18 нагрузки, превышает допустимый уровень. Нагрузка на приводе ротора не меняет своего знака при изменении направления движения привода поворота, т.е. при изменении знака сигнала задания. Для сохранения в системе знака обратной связи по нагрузке при изменении знака сигнала задания в устройство введены детектор 22 нуля ключ 21 и инвертор 20, При положительном знаке сигнала задания детектор нуля влкючает ключ 21 таким образом, что выходной сагнал блока 19 отсечки, имея отридателвный знак,, поступает на вход блока 5 сравнения минуя инвертор 20. При отрицательно знаке сигнала задания ключ включает ся так, что выходной сигнал блока 1 подается на вход сравнения через ин вертор 20. Блок 13 выделения модуля сигнала в простейшем случае представляет со бой двухполупериодный выпрямитель, знак выходного,сигнала которого не зависит от знака входного сигнала. Блок 19 формирования отсечки пре ставляет собой усилитель, выходной сигнал которого появляется после достижения входным сигналом некото, рого заданного порога. Принципиальная схема блока 23 масштабирования сигнала задания состоит из транзисторных ключей Т 24, Т 25, резисторов 26 - 28, импульсного усилителя 29 и операционного усилителя 30, соединенных между собой соответствующим образом. Скорость следящего привода со при статическомрегулировании в установившемся режиме определяется из выраженияпр ос, ос где К. -коэффициент передачи прямого контура системы регу лирования; коэффициент передачи датчи ка скорости; момент нагрузки; коэффициент,характеризующий жесткость механическо характеристики приводного двигателя; . и,- выходное напряжение блока торможения привода. Знак плюс соответствует отрицаельной обратной связи, знак минус положител ьной. Так как выходной сигнал датчика скорости UQ пропорционален ы , то выражение (1) можно записать в виде - коэффициент передачи разомкнутой системы. Для систем управления приводом горных машин, исходя из устойчивости системы регулирования К выбирается не более 3-4. Например, если , то, как слевыражения (2) , UQ отличаетдует из ся от и на 50%, т.е. ошибка по заДанию составляет что недопус- тимо. Эта .ошибка полностью компенсируется, если сигнал Uо перед подачей на блок сравнения умножить на коэффициент, равный В этом случае откуда видно, что ошибка по заданию отсутствует. Таким образом, если система управления приводом замкнута отрицательной обратной связью, ToU умножается на величину --- , а при замыкании системы положительной обратной связью На- умножается на коэффициент, равный -jj- . При отрицательной обратной связи, открыт транзистор Т1 (Т2 закрыт) и и умножается на коэффициент передачи с- 1 + К RI К При положительной обратной связи открыт транзистор Т2 (Tl) закрыт и и2 умножается на коэффициент .Источником экономической эффектив ности предлагаемого устройства является повыщение эксплуатационной производительности роторного экскаватора за счет снижения простоев, вызываемых повьшенным износом его элементов, подвергающихся динамическим нагрузкам. При этом снижение ди намических.нагрузок на 15-20% позволяет повысить эксплуатационную производительность примерно на 2%.
От блока 2
К 5локд 5
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ | 0 |
|
SU203034A1 |
| Ломакин М.С | |||
| Автоматическое управление технологическими процессами карьеров | |||
| М., Недра, 1978, с | |||
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
