(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛЕДОБЫВАЮЩЕЙ МАШИНОЙ В ПРОФИЛЕ ПЛАСТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1977 |
|
SU899933A1 |
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1983 |
|
SU1132012A2 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1985 |
|
SU1270321A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1974 |
|
SU779577A1 |
| Способ определения порогов срабатывания системы управления угольным комбайном в профиле пласта | 1982 |
|
SU1093808A1 |
| Устройство автоматического управления исполнительным органом горной машины по гипсометрии пласта | 1985 |
|
SU1270322A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
1
Изобретение относится к горной промышленности, а именно к области автоматизации горных машин.
По основному авт. св. № 899933 известно устройство автоматического управления угледобываюш,ей машиной в профиле пласта, содержаш,ее расположенный на исполнительном органе датчик порода - уголь, блок управления, соединенный со входами электронных ключей, два времязадающих элемента, датчики концевых положений гидродомкрата исполнительного органа, электрогидропереключатель управления исполнительным органом-, две схемы совпадения, схему ИЛИ, электрогидропереключатель управления гидродомкратами машины и триггер 1.
Недостаток известного устройства заключается в том, что при управлении нижним режущим органом имеет место некомпенсированное изменение наклона комбайна.
Цель изобретения - повышение точности регулирования за счет обеспечения самостабилизации угла наклона комбайна и разделения зон управления углом наклона комбайна и плоскопараллельным перемеш,ением режуш,его органа.
Поставленная цель достигается тем, что устройство снабжено дополнительной схемой ИЛИ, входы которой соединены с выходами датчиков концевых положений гидродомкрата режущего органа, а выходы
5 схемы ИЛИ подключены к соответствующим входам электронных ключей и схем совпадения.
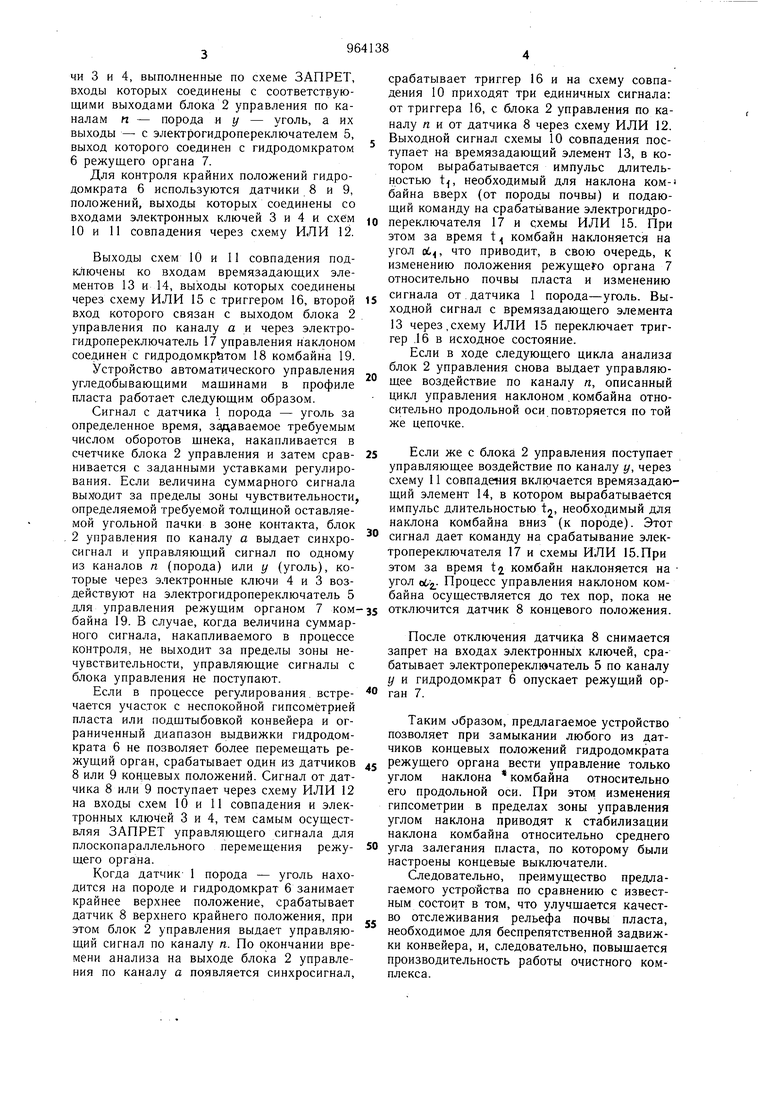
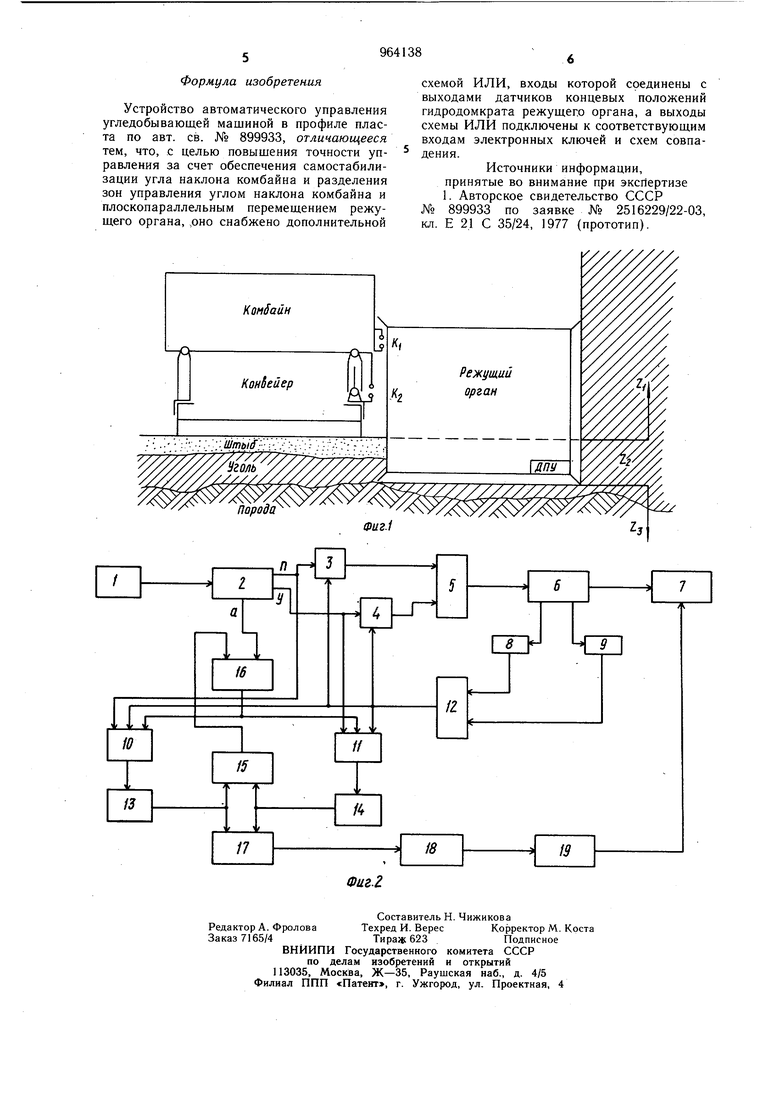
На фиг. 1 схематически изображен комбайн с режущим органом на ставе конве10 йера; на фиг. 2 - функциональная схема устройства.
Управление комбайном происходит в трех раздельных зонах Ъ -2з, причем в зонах Z .( и Z 3 управление производится только углом наклона комбайна относительно его
15 продольной оси. При этом вход и выход из зон Z или Zj возможен лищь при том среднем значении угла наклона комбайна, которое соответствует углу залегания пласта, что достигается соответствующей на20 стройкой датчиков концевых положений гидродомкрата режущего органа К- и Kj.
Устройство содержит датчик 1 порода - уголь, расположенный на режущем органе комбайна, выход которого соединен со входом блока 2 управления; электронные клюи 3 и 4, выполненные по схеме ЗАПРЕТ, ходы которых соединены с соответствуюими выходами блока 2 управления по каалам п - порода и у - уголь, а их ыходы - с электрогидропереключателем 5, ыход которого соединен с гидродомкратом режущего органа 7.
Для контроля крайних положений гидроомкрата 6 используются датчики 8 и 9, оложений, выходы которых соединены со ходами электронных ключей 3 и 4 и схем 0 и 11 совпадения через схему ИЛИ 12.
Выходы схем 10 и 11 совпадения подключены ко входам времязадающих элементов 13 и 14, выходы которых соединены через схему ИЛИ 15 с триггером 16, второй вход которого связан с выходом блока 2 управления по каналу а и через электрогидропереключатель 17 управления наклоном соединен с гидродомкрйтом 18 комбайна 19.
Устройство автоматического управления угледобывающими машинами в профиле пласта работает следующим образом.
Сигнал с датчика 1 порода - уголь за определенное время, задаваемое требуемым числом оборотов щнека, накапливается в счетчике блока 2 управления и затем сравнивается с заданными уставками регулирования. Если величина суммарного сигнала вьшодит за пределы зоны чувствительности, определяемой требуемой толщиной оставляемой угольной пачки в зоне контакта, блок 2 управления по каналу а выдает синхросигнал и управляющий сигнал по одному из каналов п (порода) или у (уголь), которые через электронные ключи 4 и 3 воздействуют на электрогидропереключатель 5 для управления режущим органом 7 комбайна 19. В случае, когда величина суммарного сигнала, накапливаемого в процессе контроля, не выходит за пределы зоны нечувствительности, управляющие сигналы с блока управления не поступают.
Если в процессе регулирования, встречается участок с неспокойной гипсометрией пласта или подштыбовкой конвейера и ограниченный диапазон выдвижки гидродомкрата 6 не позволяет более перемещать режущий орган, срабатывает один из датчиков 8 или 9 концевых положений. Сигнал от датчика 8 или 9 поступает через схему ИЛИ 12 на входы схем 10 и 11 совпадения и электронных ключей 3 и 4, тем самым осуществляя ЗАПРЕТ управляющего сигнала для плоскопараллельного перемещения режущего органа.
Когда датчик- 1 порода - уголь находится на породе и гидродомкрат 6 занимает крайнее верхнее положение, срабатывает датчик 8 верхнего крайнего положения, при этом блок 2 управления выдает управляющий сигнал по каналу п. По окончании времени анализа на выходе блока 2 управления по каналу а появляется синхросигнал.
срабатывает триггер 16 и на схему совпадения 10 приходят три единичных сигнала: от триггера 16, с блока 2 управления по каналу /г и от датчика 8 через схему ИЛИ 12.
5 Выходной сигнал схемы 10 совпадения поступает на времязадающий элемент 13, в котором вырабатывается импульс длительностью t{, необходимый для наклона ком-i байна вверх (от породы почвы) и подающий команду на срабатьшание электрогидро0 переключателя 17 и схемы ИЛИ 15. При этом за время t комбайн наклоняется на угол о6, что приводит, в свою очередь, к изменению положения режуще -о органа 7 относительно почвы пласта и изменению
j сигнала от датчика 1 порода-уголь. Выходной сигнал с времязадающего элемента 13 через,схему ИЛИ 15 переключает триггер .16 в исходное состояние.
Если в ходе следующего цикла анализа блок 2 управления снова выдает управляю щее воздействие по каналу п, описанный . цикл управления наклоном .комбайна относительно продольной оси повт.оряется по той же цепочке.
5 Если же с блока 2 управления поступает управляющее воздействие по каналу у, через схему 11 совпадения включается времязадающий элемент 14, в котором вырабатывается импульс длительностью t2, необходимый для наклона комбайна вниз (к породе). Этот
сигнал дает команду на срабатывание электропереключателя 17 и схемы ИЛИ 15. При этом за время t, комбайн наклоняется на угол 0,2.- Процесс управления наклоном комбайна осуществляется до тех пор, пока не 5 отключится датчик 8 концевого положения.
После отключения датчика 8 снимается запрет на входах электронных ключей, срабатывает электропереключатель 5 по каналу у и гидродомкрат 6 опускает режущий оро ган 7.
Таким образом, предлагаемое устройство позволяет при замыкании любого из датчиков концевых положений гидродомкрата
5 режущего органа вести управление только углом наклона комбайна относительно его продольной оси. При этом изменения гипсометрии в пределах зоны управления углом наклона приводят к стабилизации наклона комбайна относительно среднего
50 угла залегания пласта, по которому были настроены концевые выключатели.
Следовательно, преимущество предлагаемого устройства по сравнению с известным состоит в том, что улучщается качество отслеживания рельефа почвы пласта, необходимое для беспрепятственной задвижки конвейера, и, следовательно, повышается производительность работы очистного комплекса.
