«
Изобретение относится к горному делу, а более конкретно к автоматизации горных машин, и может быть использовано при разработке угледобывающих комплексов для безлюдной выемки угля.
По основному авт.св. № 899933 известно устройство для автоматического управления угледобывающей маимной в профиле пласта, которое содержит расположенньй на исполнительном органе датчик порода-уголь, приемный блок, соединенный с входом электронного ключа, времязадающй элемент, датчики концевых положений гидродом5срата исполнительного органа и электрогндропереключатель управления исполнительным органом, второй электронный ключ и времязадающий элемент, две схемы совпадения, схему ИЛИ, электрогидропереключатель управления гидродомкратами машины и триггер, причем первый вход второго электронного ключа соединен с соответствующим выходом приемного блока, а вторые входы этих электронных ключей подключены к соответствующим датчикам концевых положений гидродомкратов и первым входам схем совпадения вторые и третьи входы которых подключены к соответствующим выходам приемного блока и триггера, а выходы схем совпадения соединены с входами времязадающих элементов, выходы которых подключены к электрогидропереключателю управления гидродомкратами машины и через схему ИЛ к одному из .входов триггера, второй вход которого подключен к выходу приемного блока, который через электронные ключи соединен с электрогидропереключателем управления гидроДомкратом исполнительного органа.
При неспокойной гипсометрии пласта это устройство для более точного отслеживания рельефа пласта позволяет управлять машиной не только с помощью плоско-параллельньж перемещений исполнительного органа, но и наклоном ее относительно продольной оси.
Однако данное устройство не обеспечивает высокое качество управления машиной, поскольку в нем не предусмотрена стабилизация положени машины относительно угла залегания пласта, что может привести в условиях геологических нарушений в
32012 ,1
неспокойной гипсометрии к недопустиMbn-i изгибам и скручиваниям става конвейера комплекса, его поломке и снижению производительности труда.
Цель изобретения - улучшение качества управления машиной при неспокойной гипсометрии пласта.
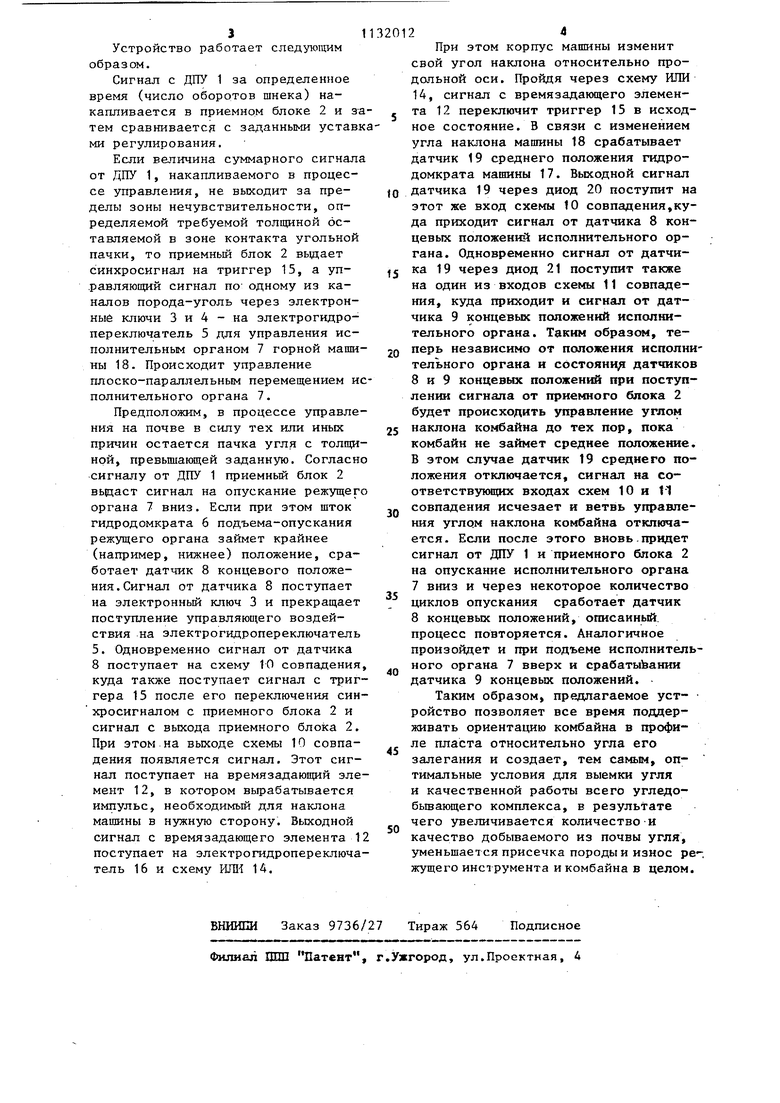
Указанная цель достигается тем, что устройство для автоматического ,Q управления угледобывающей машиной в профиле пласта снабжено датчиком среднего положения гидродомкрата машины и двумя развязывающими элементами, входы которых соединены с ходом датчика среднего положения гидродомкрата машины, а выходы подсоединены соответственно к выходам датчиков концевых положений гидродомкрата исполнительного органа. 2Q На чертеже изображена функциональная схема предлагаемого устройства.
Устройство содержит датчик порода-уголь (ДПУ) 1, расположенный на исполнительном органе мапгины, вькод25 ной сигнал которого подается на
вход приемного блока 2, электронные ключи 3 и А, входы которых соединены с соответствую цими выходами приемного блока 2 по каналам породауголь, а выходы ключей соединены с электрогидропереключателем 5, выход которого соединен с гидродомкратом 6 исполнительного органа 7.
Контроль крайних положений гидродомкрата 6 обеспечивается датчиками 8 и 9 концевых положений, выходы которых соединены с входами электронных ключей 3 к 4 и одним из входов схем 10 и 11 совпадения, выходы последних соединены с входами времязадающих элементов 12 и 13, а их выходы соединены через схему ИЛИ 14 с триггером 15, вход которого соединен с выходом приемного блока 2 и через э лек трог и,цропереключатель 15 управления наклоном горной машины относительно продольной оси с гидродомкратом 17 горной машины 18.
50 Контроль среднего положения
гидродомкрата 17 машины обеспечивается датчиком 19 среднего положения, к выходу которого подключены одноименными электродами два диода
55 (развязывающие элементы) 20и 21, другие электроды которых соединены с выходами датчиков концевых положений 8 и 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1977 |
|
SU899933A1 |
| Устройство автоматического управления угледобывающей машиной в профиле пласта | 1978 |
|
SU964138A2 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Устройство автоматического управления исполнительным органом горной машины по гипсометрии пласта | 1985 |
|
SU1270322A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1985 |
|
SU1270321A1 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1974 |
|
SU779577A1 |
| Способ определения порогов срабатывания системы управления угольным комбайном в профиле пласта | 1982 |
|
SU1093808A1 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1975 |
|
SU899932A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949175A2 |
УСТРОЙСТЮ ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛЕДОВЬВМЩЕЙ МАШИНОЙ В ПРОФЦЛЕ ПЛАСТА по авт.св. 9 899933 отличающееся тем, что, с целью улучшения качества управления, оно снабжено датчиком среднего положения гидррдомкрата машины и двумя развязывакяцими элементами, входы которых соединены с выходом датчика среднего положения гидродомкрата машины, a выходы подсоединены соответственно к выходам датчиков концевых положений гидродомкрата исполнительного органа .