I
Изобретение относится к средствам механизации графических работ, в частности к механизмам для механического преобразования кривых линий.
Известен шарнирно-рычажный механизм преобразователя кривых, содержащий три шарнирно установленные на основании кулисы, попарно связанные между собой диадами, состоящими из двух шарнирно соединенных ползуНОВ СП
Недостаток известного механизма ограниченность формы преобразованной кривой, обусловленная наличием в механизме неизменной прямолинейной направляющей.
Цель изобретения - расширение диапазона решаемых задач.
/}ля достижения этой цели шарнирнорычажный механизм преобразователя кривых, содержащий три шарнирно установленные на основании кулисы, попарно связанные между собой диадами, состоящими из двух шарнирно соединенных ползунов, имеет шарнирно установ.пенный на основании кривошип, свободный конец которого шарнирно связан с одной из диад.
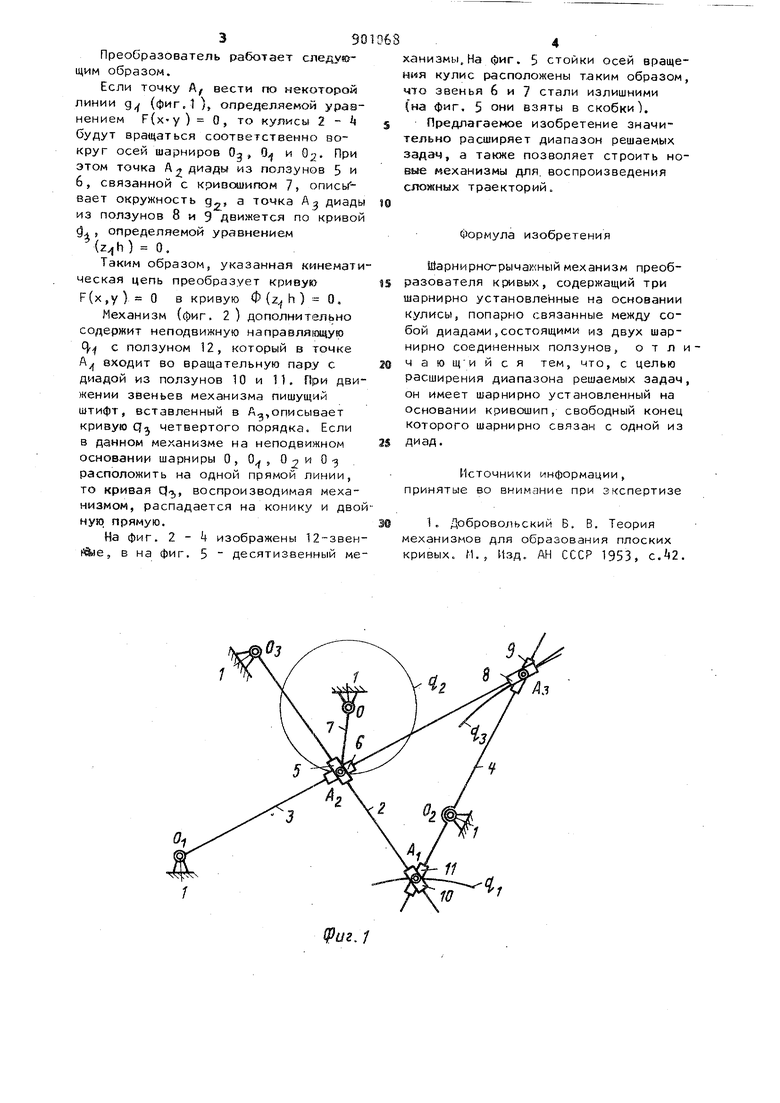
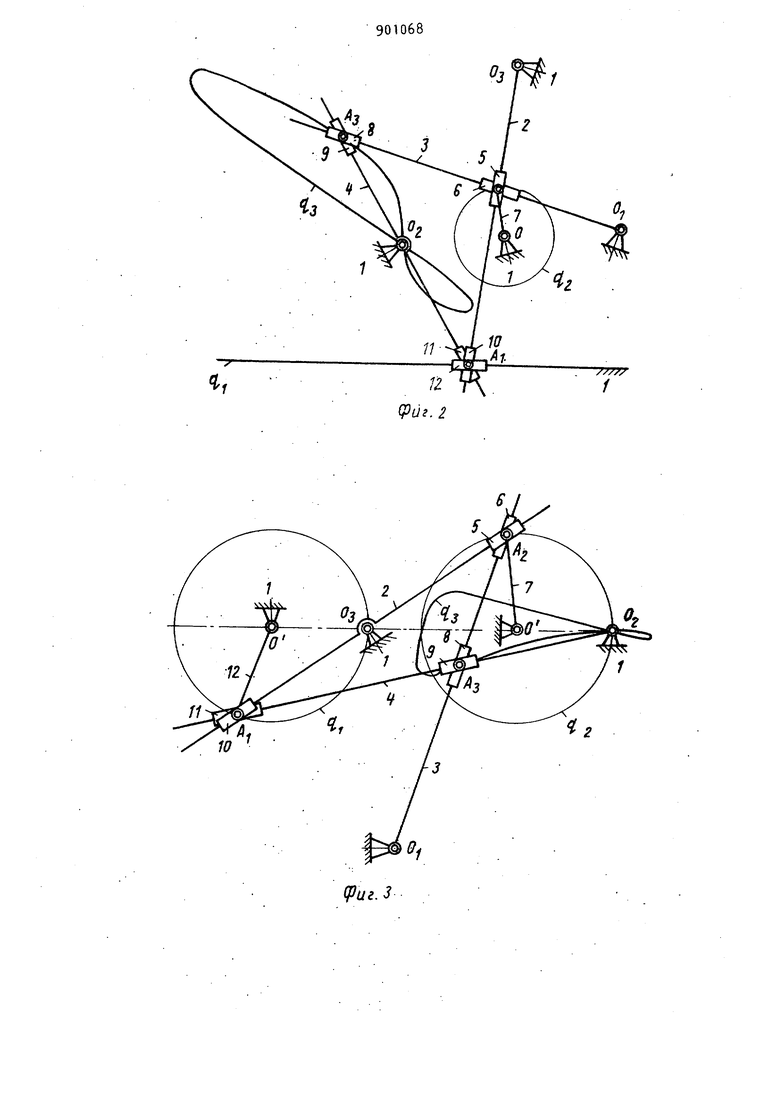
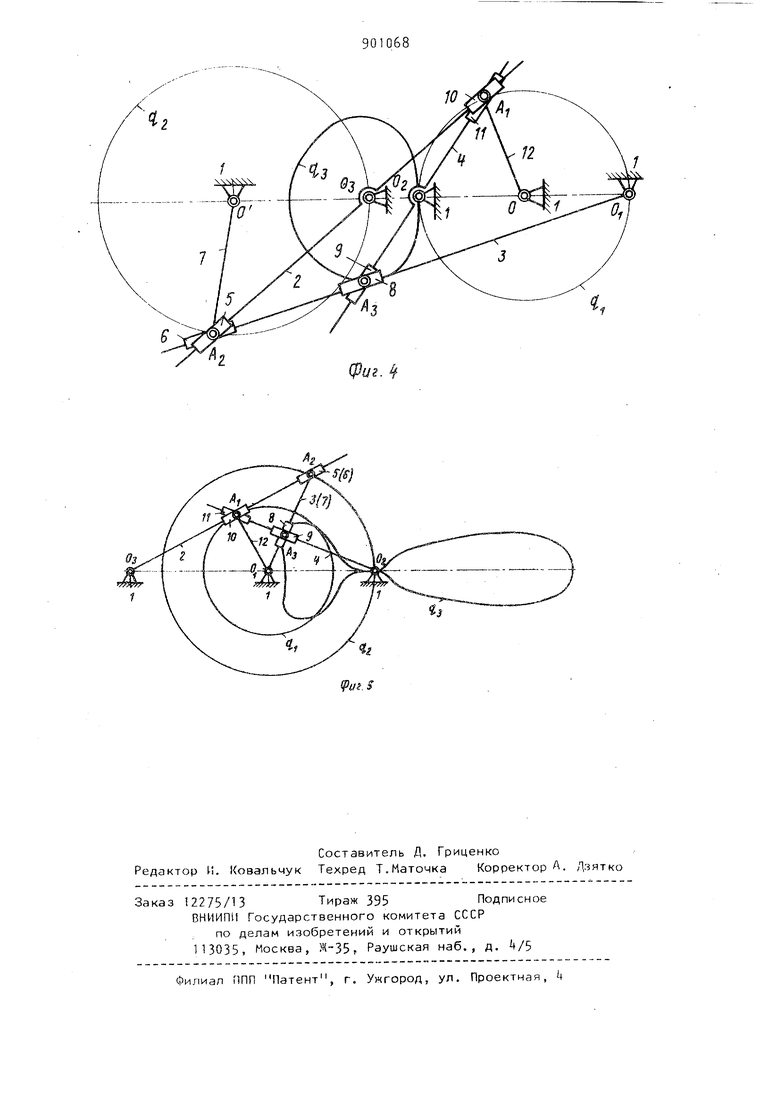
На фиг. 1 показана кинематическая схема предлагаемого шарнирнорыЧа«ного преобразователя; на фиг.2-5 кинематические схемы механизмов для образования различных алгебраических кривых (в основу по10строения механизмов положен предлагаемый механизм преобразователя).
На неподвижном основании 1 шарнирно закреплены кулисы 2 - . Кулисы
IS 2 и 3 подвижно связаны диадой, состоящей из ползунов 5 и 6. Диада шарнирно связана с кривошипом 7, шарнирно закрепленным на основании 1. Кулисы 3 и t, 2: и 4 подвижно свя20заны соответственно диадами из ползунов 8 и 9, 10 и 11. Данная кинематическая цепь обладает двумя степенями свободы. 39 Преобразователь работает следукгщим образом. Если точку А вести по некоторой линии д (фиг,1 ), определяемой уравнением Г(ху ) О, то кулисы 2 - А будут вращаться соответственно вокруг осей шарниров 0, 0 и 02. При этом точка А2 диады из ползунов 5 и 6, связанной с кривошипом 7 описьГвает окружность д„, а точка А диад из ползунов 8 и 9 движется по криво с ; определяемой уравнением ()0. Таким образом, указанная кинемат ческая цепь преобразует кривук F(x fV ) О в кривую Ф (2 h ) 0. Механизм (фиг, 2 ) дополнительно содержит неподвижную направля1Ш4у р ( с ползуном 12, который в точке А входит во вращательную пару с диадой из ползунов 10 и 11. При дви жении звеньев механизма пишущий штифт, вставленный в А,описывает кривую Cf четвертого порядка. Если в данном механизме на неподвижном основании шарниры 0, 0 , О 2 и О-3 расположить на одной прямой линии, то кривая q,, воспроизводимая механизмом, распадается на конику и дво нунз прямую. На фиг. изображены 12-звен в на фиг. 5 десятизвенный ме .4 анизмы.На фиг. 5 стойки осей вращеия кулис расположены таким образом, Ч1О звенья 6 и 7 стали излишними (на фиг. 5 они взяты в скобки). Предлагаемое изобретение значительно расширяет диапазон решаемых задач, а также позволяет строить новые механизмы для. воспроизведения сложных траекторий. Формула изобретения Шарнирно-рычакный механизм преобразователя кривых, содержащий три шарнирно установленные на основании кулисы, попарно связанные между собой диадами,состоящими из двух шарнирно соединенных ползунов, о т л и чаю щи и с я тем, что, с целью расширения диапазона решаемых задач, он имеет шарнирно установленный на основании кривошип, свободный конец которого шарнирно связан с одной из диад. Источники информации, принятые во внимание при экспертизе 1. Добровольский Б. В. Теория механизмов для образования плоских кривых. М., Изд. АН СССР 1953, с.2.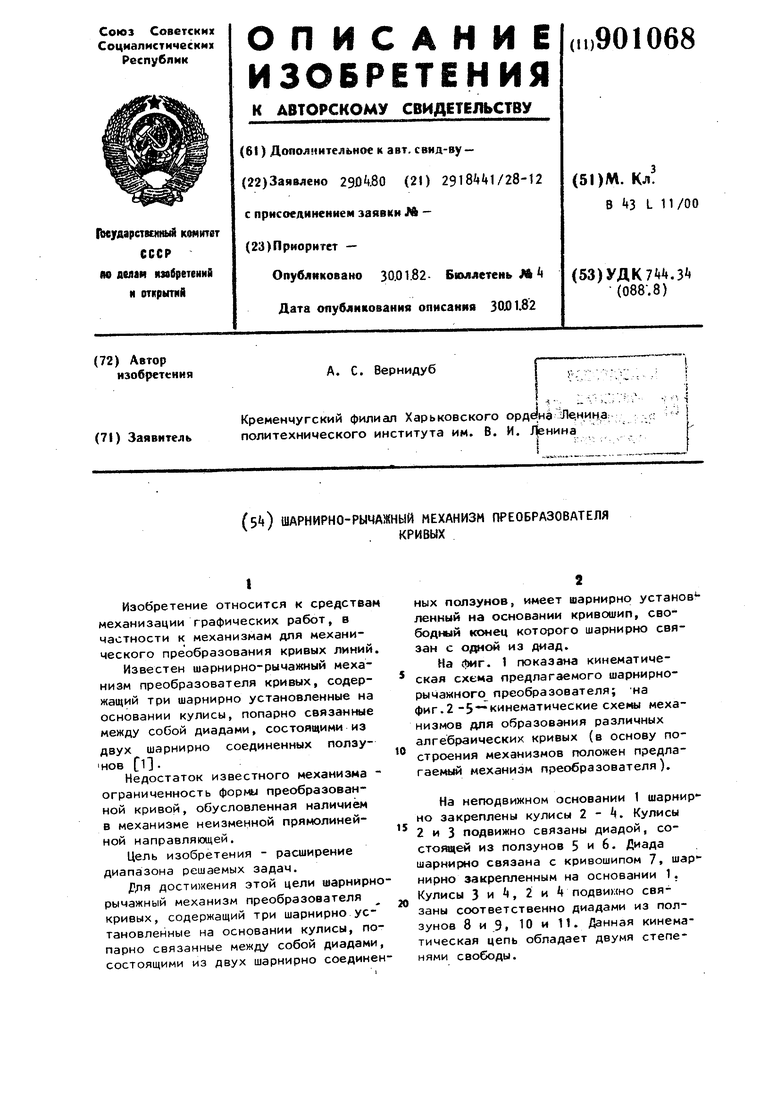
(Риг. 3
Оз
