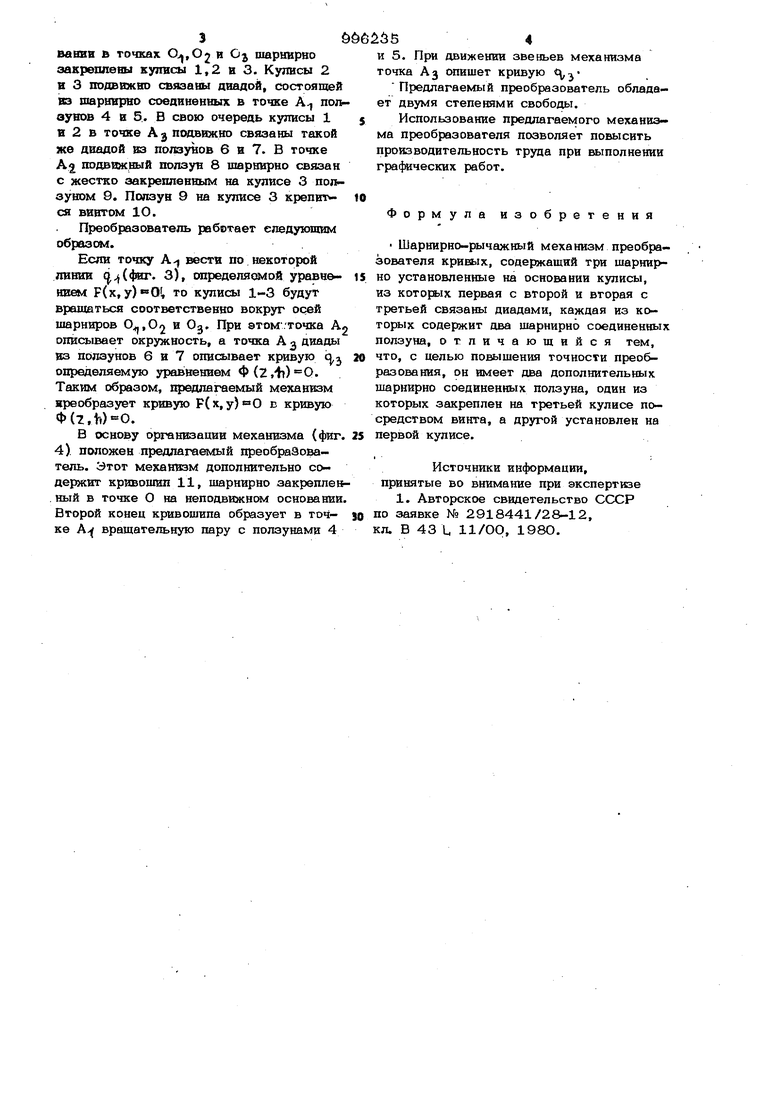
Изобретение относится к средствам механизации гра |яиеских работ, в частности к механизмам для механического преобразования кривых пиний к может быть использован для органшаиви механизмов, воспроизводящих различные алгебраичео кие кривые. Полученные на этой основе механизмы могут быть использованы в проектных и конструкторских организациях для воспровзвадевия кр1шых пиний, часто встречающихся при разработке чертежей. Известен шарнирно-рычажный механизм преобразователя кривых, содеркащвй три шарнирно установлевные та основании кулисы, вз которых первая с второй и вторая с третьей связаны диадами, каждая из которых содержит два шарнирно соединенных ползуна I.. Недостатком известного механизма является его сложность, что приводит к с снижению точности преобразования кривых Цель изобретения - новышевне точности. Цель достигается тем, что шарнирнорычажный механизм преобразователя кривых, содержащий три шарнирно установленные на основа НЕЙ кулисы, из которых первая с второй и вторая с третьей св(заны диадами, каждая кз которых содер жит два шарнирно соединенных ползуна, имеет два дополнительных шарнирно соединеннык ползуна, один из которых закреплен на третьей куттсе посредством винта, а другой установлен на первой кулисе.. На фиг, 1 изображен механизм предлагаемого шарнирно-рычажного преобразователя; на фиг. 2 - разрез А-А на фиг, 1 (показано крепление ползуна на кулисе); на фиг. 3 - кинематическая преобразователя; на фиг, 4 - кинематическая схема механизма, в основу которого положен предлагаемый преобразователь. Механизм шартфно-рычажного преобразователя кривых имеет следующее устройство (фиг, 1), На неподв окиом основавнв в точках Oj,O2 и О шарыирво закреплены куивсы 1,2 в 3. Кулисы 2 Н 3 подвижно связаны диадой, состоящей вэ оюрннрво соединенных в точке А попгвувов 4 и 5. В свою очередь кулисы 1 В 2 в точке А J подвижно связаны такой же диадой вз ползунов 6 в 7. В точке А2 подвижный ползун 8 шарнирно связан с жестко закрепленным на кулисе 3 ползуном 9. Ползун 9 на кулисе 3 крепится винтом Ю.
Преобразователь работает следующим образом.
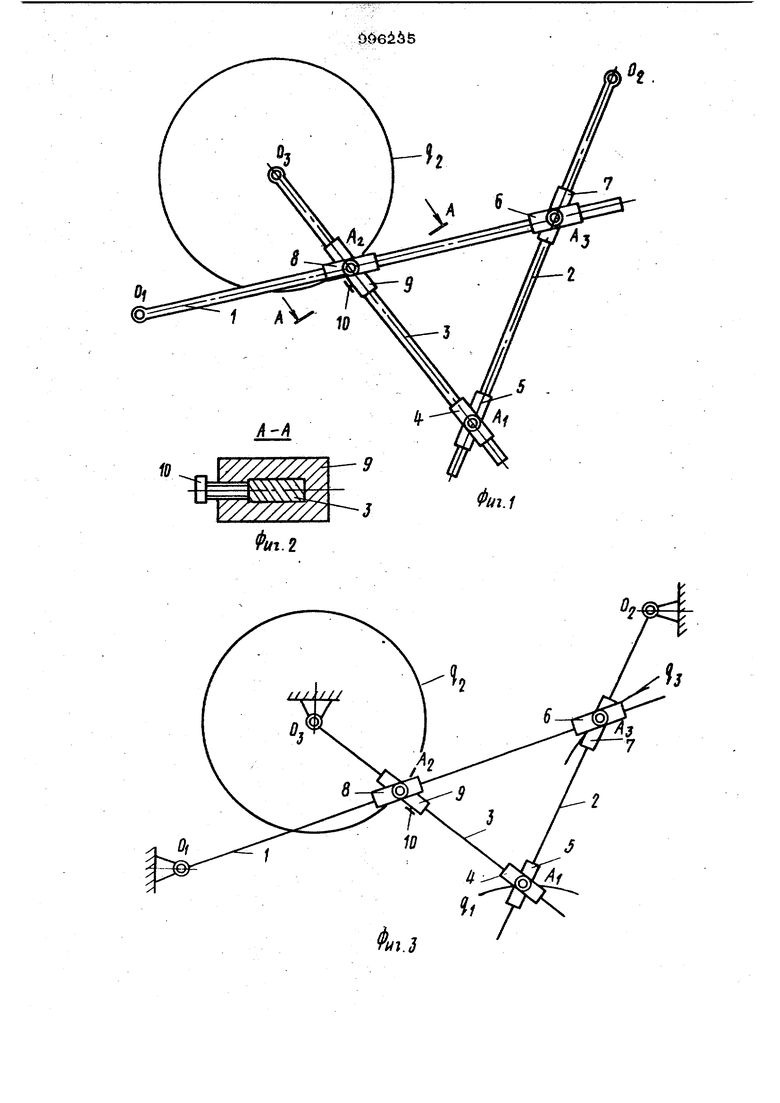
Если точку A-J вести по некоторой лишга (фиг. 3), определяемой уравн&нием F(x, у), то кулисы 1-3 будут вращаться соответственно вокруг осей шарниров О,О2 и 0. При этом.точка Ag описывает окружность, а точка А диады из ползунов 6 в 7 описывает кривую cj, определяемую уравнением Ф(2,|). Таким образом, предлагаемый мезсанизм иреобразует кривую F(x, у)вО в кривую Ф(1,1).
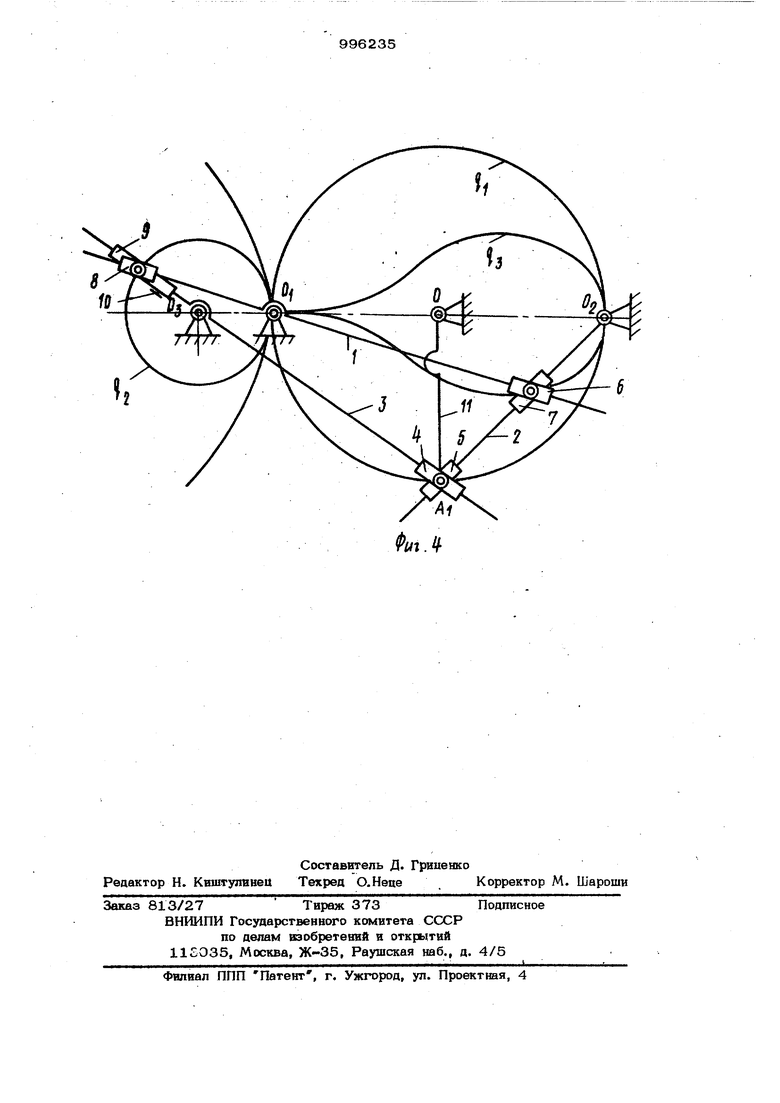
В основу организации механизма (фиг. 4) положен предлагаемый преобразователь. Этот механизм дополнительно ct держвт кривощип 11, шарнирно закрепле ный в точке О на неподвижном основании. Второй конец кривошипа образует в точке А- вращательную пару с ползунами 4
и 5. При движении звеньев механизма точка АЗ опишет кривую t,-j
Предлагаемый преобразователь обладает двумя степенями свободы.
Использование предлагаемого механизма преобразователя позволяет повысить производительность труда при выполнении графических работ.
Формула изобретения
Шарнирно-рычажный механизм преобразователя кривых, содержащий три шарни{ но установленные на основании кулисы, из которых первая с второй и вторая с третьей связаны диадами, каждая из которых содержит два шаркирно соединенных ползуна, отличающийся тем, что, с целью повышения точности преобразования, он имеет два дополнительных шарнирно соединенных ползуна, один из которых закреплен на третьей кулисе посредством винта, а другой установлен на первой кулисе.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2918441/28-12, кл. В 431, 11/00, 1980.
ФигЛ