(54) ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ ГОМОЛОГИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ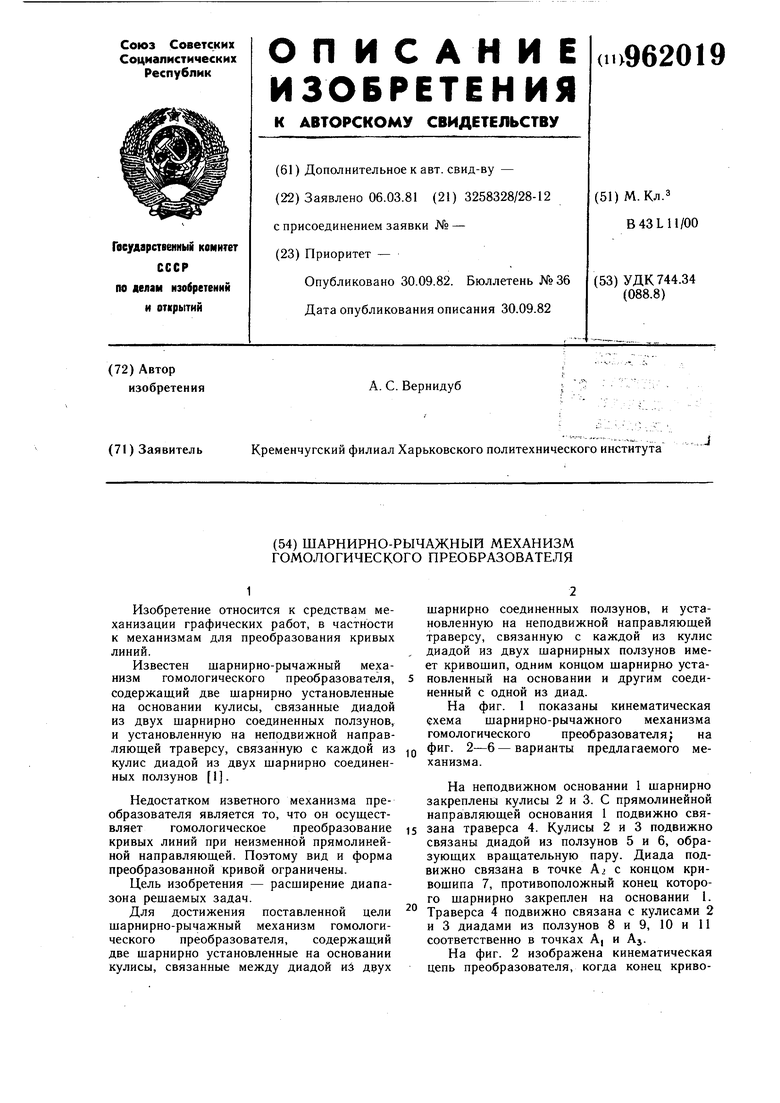
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулисно-рычажный механизм преобразователя кривых | 1981 |
|
SU992233A1 |
| Шарнирно-рычажный механизм преобразователя кривых на основе дву-двузначного соответствия | 1983 |
|
SU1121161A1 |
| Кулисно-рычажный механизм преобразователя кривых | 1982 |
|
SU1058797A1 |
| Шарнирно-рычажный механизм преобразователя кривых на основе дву-двузначного соответствия | 1986 |
|
SU1335488A1 |
| Прибор для вычерчивания кривых второго порядка | 1980 |
|
SU925682A1 |
| Эллипсограф | 1984 |
|
SU1158386A1 |
| Шарнирно-рычажный механизм преобразователя кривых | 1981 |
|
SU996235A1 |
| Шарнирно-рычажный механизм преобразователя кривых | 1980 |
|
SU901068A1 |
| Прибор для воспроизведения эллипса и гиперболы | 1980 |
|
SU901069A1 |
| Шарнирно-рычажный механизм для воспроизведения кривых | 1983 |
|
SU1113284A1 |
Изобретение относится к средствам механизации графических работ, в частности к механизмам для преобразования кривых линий.
Известен шарнирно-рычажный механизм гомологического преобразователя, содержащий две шарнирно установленные на основании кулисы, связанные диадой из двух шарнирно соединенных ползунов, и установленную на неподвижной направляющей траверсу, связанную с каждой из кулис диадой из двух шарнирно соединенных ползунов 1.
Недостатком изветного механизма преобразователя является то, что он осуществляет гомологическое преобразование кривых линий при неизменной прямолинейной направляющей. Поэтому вид и форма преобразованной кривой ограничены.
Цель изобретения - расщирение диапазона рещаемых задач.
Для достижения поставленной цели шарнирно-рычажный механизм гомологического преобразователя, содержащий две шарнирно установленные на основании кулисы, связанные между диадой иЗ двух
шарнирно соединенных ползунов, и установленную на неподвижной направляющей траверсу, связанную с каждой из кулис диадой из двух шарнирных ползунов имеет кривошип, одним концом шарнирно установленный на основании и другим соединенный с одной из диад.
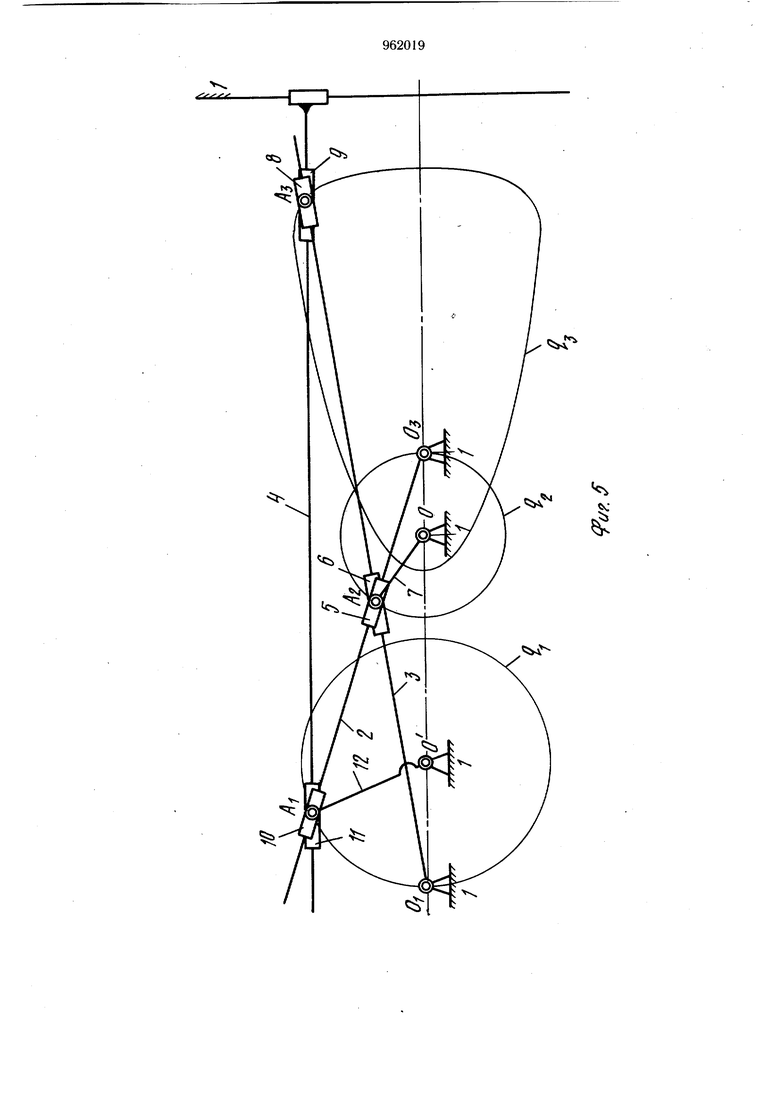
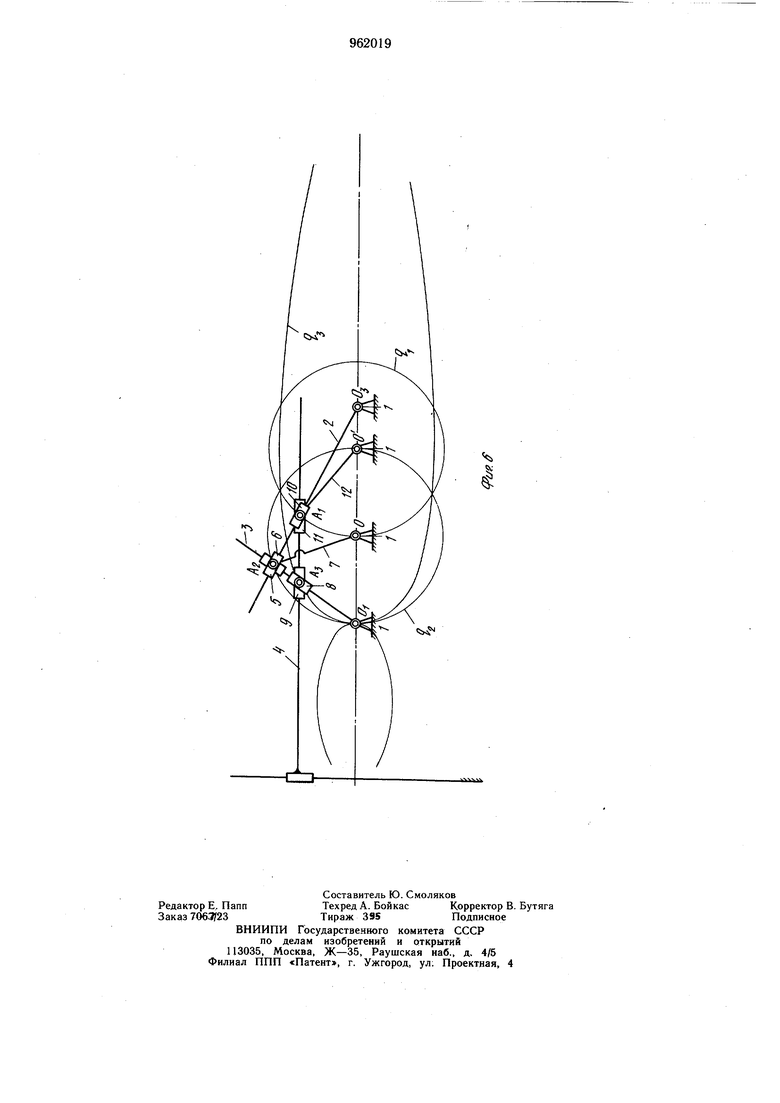
На фиг. 1 показаны кинематическая схема шарнирно-рычажного механизма гомологического преобразователя; на фиг. 2-6-варианты предлагаемого ме10ханизма.
На неподвижном основании 1 шарнирно закреплены кулисы 2 и 3. С прямолинейной направляющей основания 1 подвижно связана траверса 4. Кулисы 2 и 3 подвижно связаны диадой из ползунов 5 и 6, образующих вращательную пару. Диада подвижно связана в точке А; с концом кривощипа 7, противоположный конец которого щарнирно закреплен на основании 1.
° Траверса 4 подвижно связана с кулисами 2 и 3 диадами из ползунов 8 и 9, 10 и 11 соответственно в точках А| и АЗ.
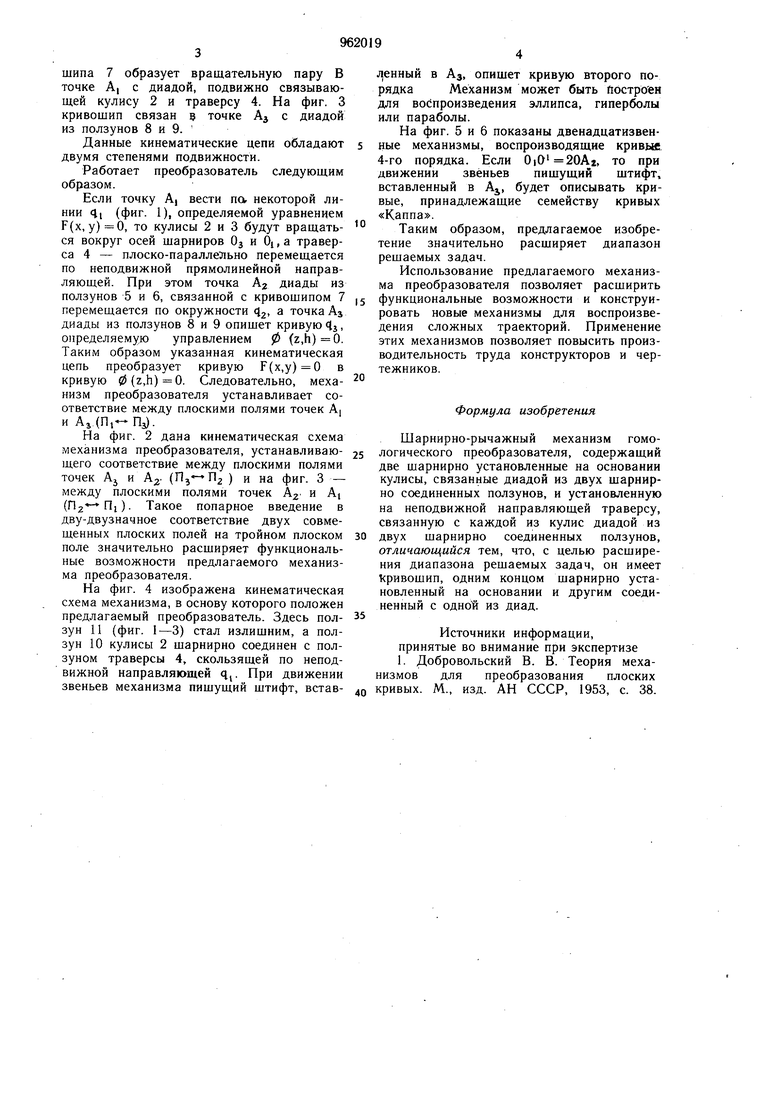
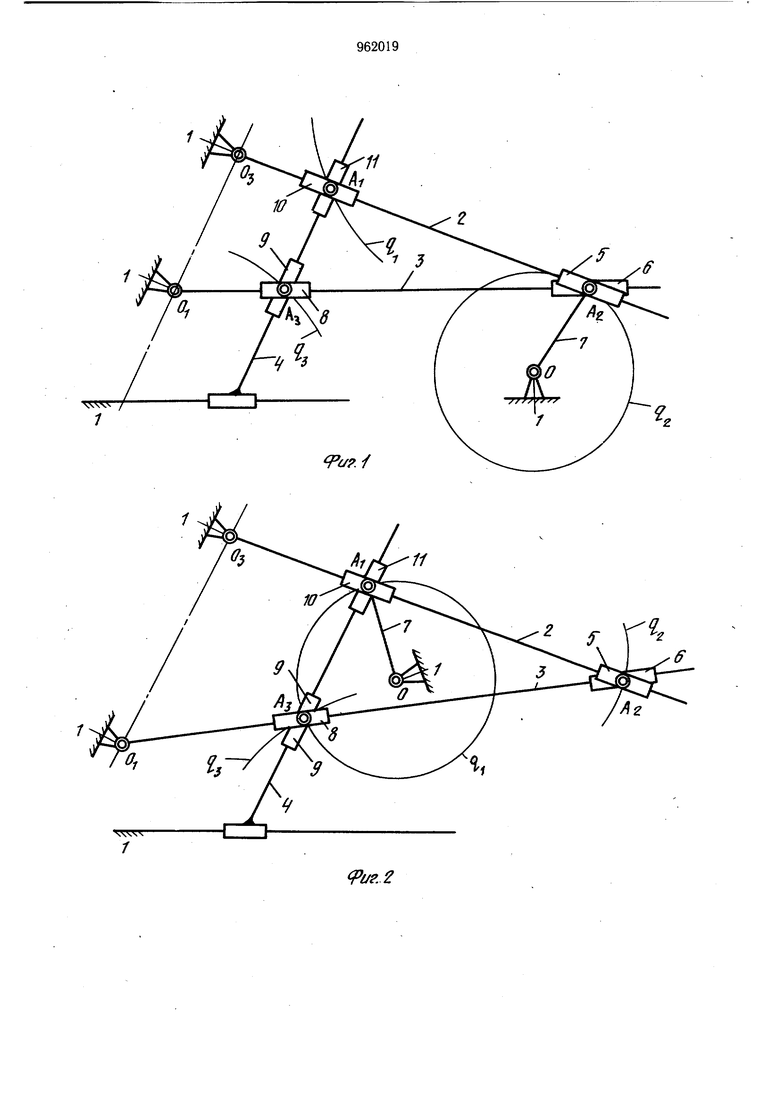
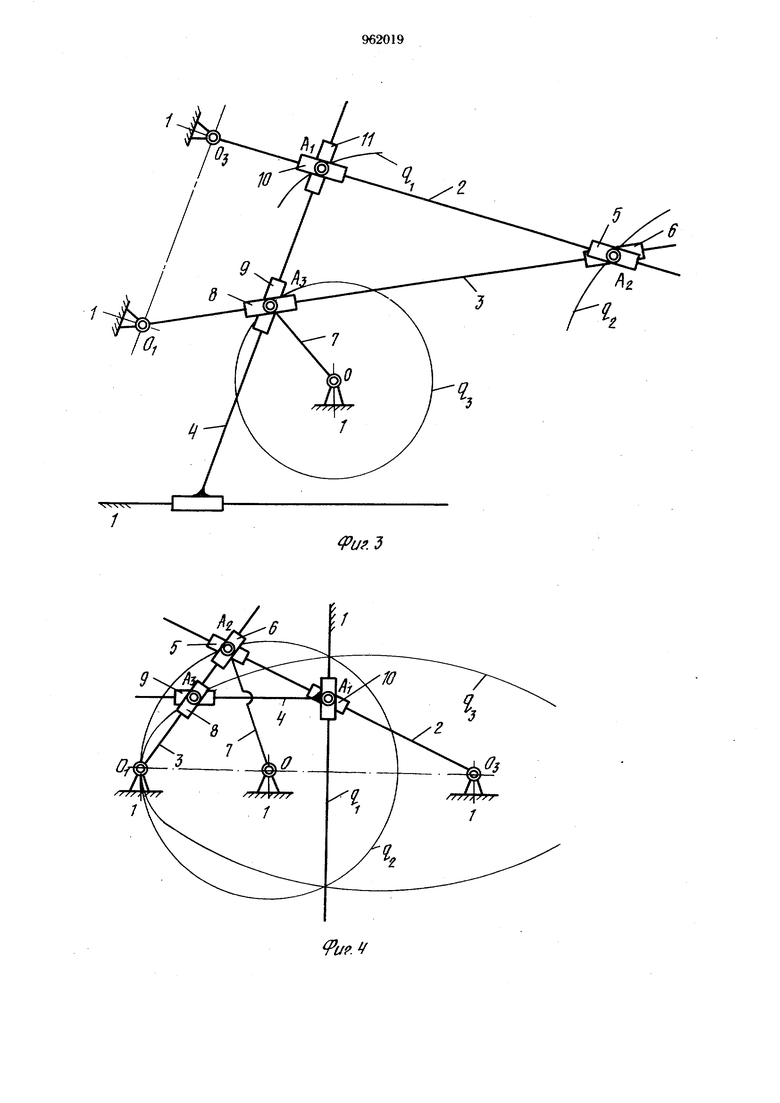
На фиг. 2 изображена кинематическая цепь преобразователя, когда конец кривошипа 7 образует вращательную пару В точке А с диадой, подвижно связывающей кулису 2 и траверсу 4. На фиг. 3 кривошип связан точке Aj с диадой из ползунов 8 и 9. Данные кинематические цепи обладают двумя степенями подвижности. Работает преобразователь следующим образом. Если точку А, вести па некоторой линии ii (фиг. 1), определяемой уравнением F(x, у)0, то кулисы 2 и 3 будут вращаться вокруг осей шарниров Оз и Oi,a траверса 4 - плоско-параллельно перемещается по неподвижной прямолинейной направляющей. При этом точка Аг диады из ползунов 5 и б, связанной с кривошипом 7 перемещается по окружности 42, а точка АЗ диады из ползунов 8 и 9 опишет кривую «Ij, определяемую управлением 0 (z,h)0. Таким образом указанная кинематическая цепь преобразует кривую F(x,y)0 в кривую 0(z,h)0. Следовательно, механизм преобразователя устанавливает соответствие между плоскими полями точек А| и Aj(n,-Пз). На фиг. 2 дана кинематическая схема механизма преобразователя, устанавливающего соответствие между плоскими полями точек AJ и (П,- ) н на фиг. 3 - между плоскими полями точек А.2 и Aj (). Такое попарное введение в дву-двузначное соответствие двух совмещенных плоских полей на тройном плоском поле значительно расширяет функциональные возможности предлагаемого механизма преобразователя. На фиг. 4 изображена кинематическая схема механизма, в основу которого положен предлагаемый преобразователь. Здесь ползун 11 (фиг. 1-3) стал излишним, а ползун 10 кулисы 2 щарнирно соединен с ползуном траверсы 4, скользящей по неподвижной направляющей . При движении звеньев механизма пишуший штифт, вставленный в АЗ, опишет кривую второго порядка Механизм может быть Построен для воспроизведения эллипса, гиперболы или параболы. На фиг. 5 и 6 показаны двенадцатизвенные механизмы, воспроизводящие кривы 4-го порядка. Если , то при движении звеньев пишущий штифт, вставленный в А, будет описывать кривые, принадлежащие семейству кривых «Каппа. Таким образом, предлагаемое изобретение значительно расширяет диапазон решаемых задач. Использование предлагаемого механизма преобразователя позволяет расширить функциональные возможности и конструировать новые механизмы для воспроизведения сложных траекторий. Применение этих механизмов позволяет повысить производительность труда конструкторов и чертежников. Формула изобретения Шарнирно-рычажный механизм гомологического преобразователя, содержащий две шарнирно установленные на основании кулисы, связанные диадой из двух шарнирно соединенных ползунов, и установленную на неподвижной направляющей траверсу, связанную с каждой из кулис диадой из двух шарннрно соединенных ползунов, отличающийся тем, что, с целью расширения диапазона решаемых задач, он имеет Кривошип, одним концом шарнирно установленный на основании и другим соединенный с одной из диад. Источники информации, принятые во внимание при экспертизе 1. Добровольский В. В. Теория механизмов для преобразования плоских кривых. М., изд. АН СССР, 1953, с. 38.
