Изобретение относится к средствам механизации графических работ, в частности к механизмам для преобразования кривых линий,, и может быть использовано, например, в вузах.
Целью изобретения является повышение точности и расширение диапазона решаемых задач.
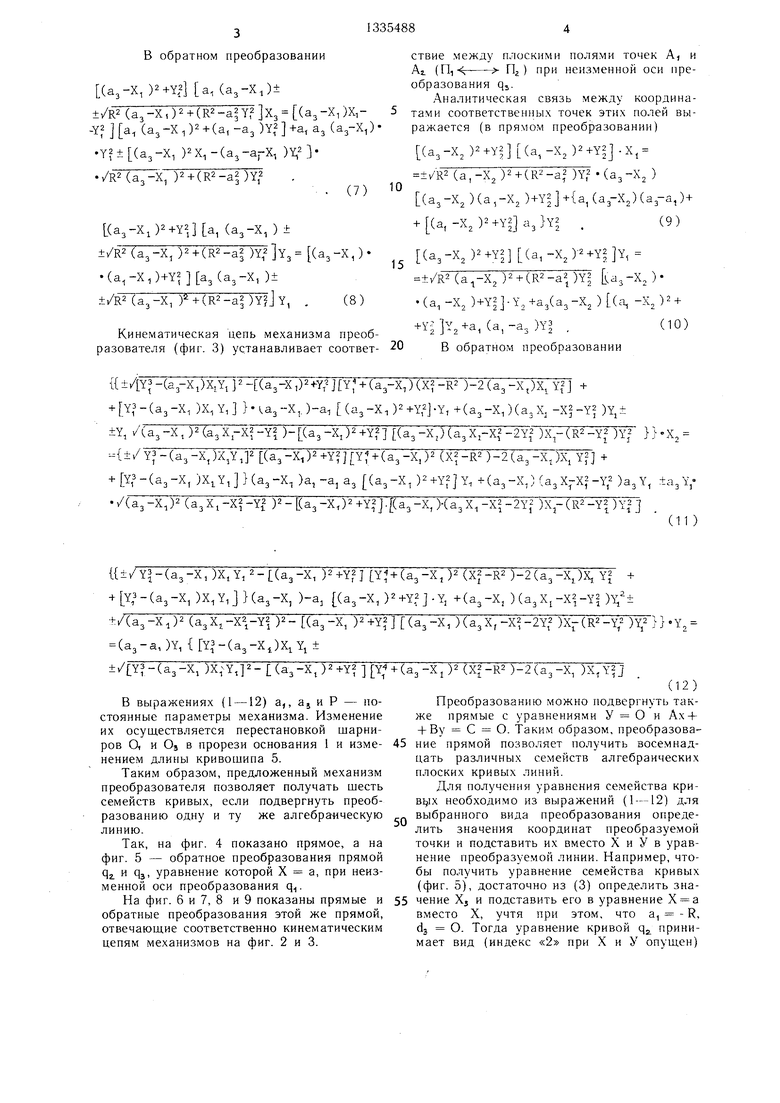
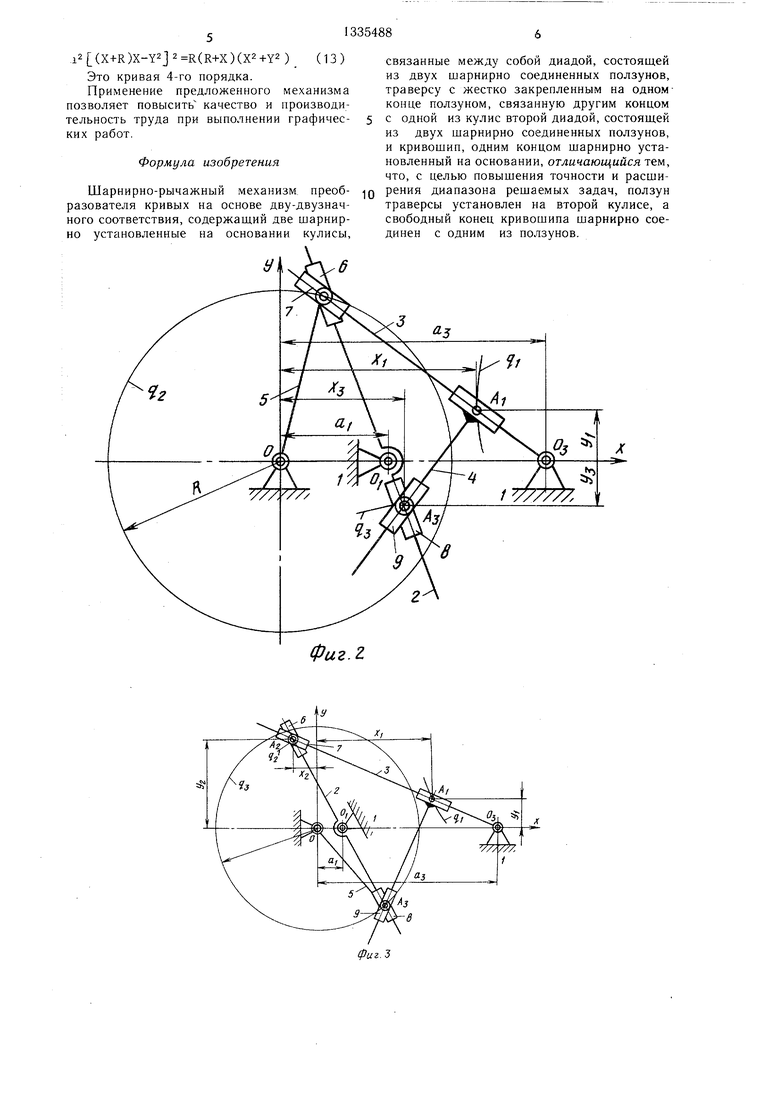
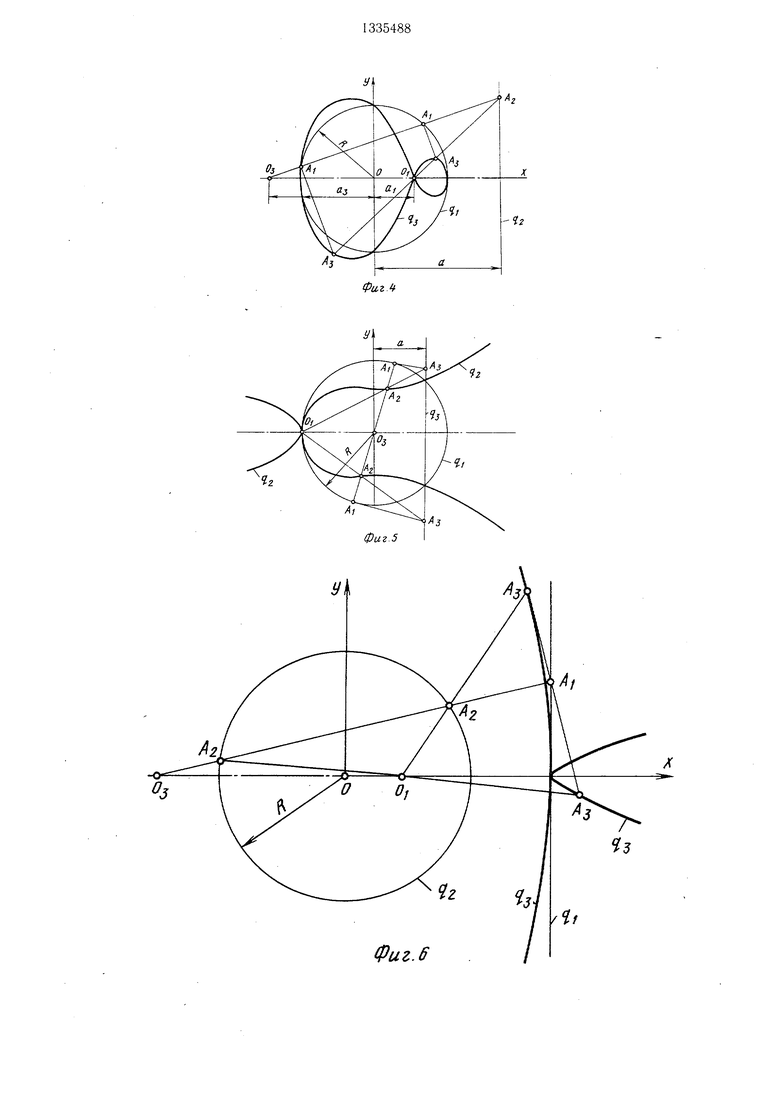
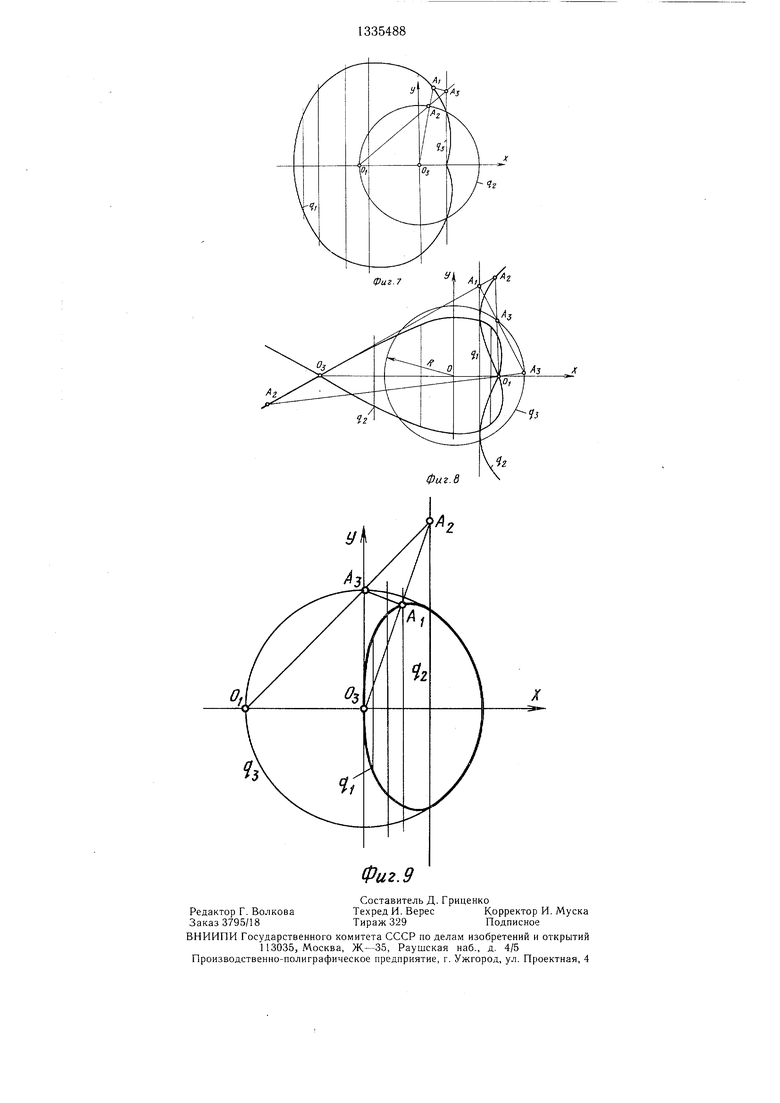
На фиг. 1 изображен предложенный механизм преобразователя кривых линий; на фиг. 2 и 3 - варианты предложенного механизма преобразователя; на фиг. 4-9 - шесть семейств кривых линий, образуемых предложенным механизмом преобразователя.
; На неподвижном основании 1 с помошью
: переставпых шарниров О, и Oj, жестко зак: репленных в прорези, установлены кулисы 2
и 3. На кулисе 3 подвижно установлен ползуп траверсы 4, который образует вращаразованной точки Ад (шфажается (прямое преобразование)
1-(1-К2 )
/R2 (1 +К2 )-К2 а|1 Х2 К2 а, а. +кз а Х -а, Хз ± (а -К2 Зз )/R2 (1 +К2 )-К2 а| , (1) ,()- (1+К2 )-K2a|l Y2 K(aj -a )
10 л(2)
15
тельную пару с кривошипом 5.. второй ко- 20 ±i/R2 (Х -а )+ ( Уу -У
(/R2 (1+К2 -Хз ), где К tg Lf
В обратном преобразовании (фиг. 1)
,, )(Х2-а )+Y% (Х2-а1 ) v R2(X2-a3 )2 + (R2-a2 )у2 + (3)
(Xj -аз ) (Х -а, )+Y2 -Y (а -Х )а, Y (4)
30
Кинематическая цепь преобразователя кривых (фиг. 2) устанавливает соответствие
между полями точек А, и Aj (П,)
при неизменной оси преобразования q.
Аналитическая зависимость координат преобразуемой точки А, от координат преобразованной точки А} в. прямом преобразовании выражается
(Хз-а1)2+у2},(а,-Хз )
нец которого закреплен на переставном шар- нИре О, жестко зафиксированном в прорези основания . Кулисы 2 и 3 в точке А связаны диадой из шарнирно соединенных юлзу- нов 6 и 7. В свою очередь кулиса 2 в точке АЗ связана с траверсой 4 такой же диа- 25 дои из шарнирно соединенных ползунов 8 и 9. Переставные шарниры О, Oi , Оз в прорези основания 1 жестко фиксируются с помогцью гаек-барашек 10.
На фиг. 2 изображена кинематическая цепь преобразователя, когда кривошип 5 шарнирно соединен в точке Aj с диадой из ползунов 6 и 7. На фиг. 3 кривошип 5 вступает в точке АЗ во вращательную пару с ползунами В и 9.
Данные кинематические цепи обладают двумя степенями свободы.
Преобразователь работает следующи.м образом.
Если точку Аг вести по некоторой ли- НИИ q,, определяемой уравнением F(X., У.) - ±/R. (, } (,а(
О, то кулисы 2 и 3 вращаются вокруг осей шарниров О, и Оз, а ползун траверсы перемещается по кулисе 3. При этом точка А, перемещается по окружности q,, так как ползун траверсы 4 шарнирно связан с кривошипом 5, ползуны 6 и 7 перемещаются по кулисам 2 и 3, а точка А диады из ползунов 8 и 9 описывает кривую q, определяемую уравнением ф(Х5, УЗ) О. Таким образом, указанная кинематическая цепь преобразует линию F(Xj, J4)O в кривую ф(),з) О при неизменной оси преобразования q., с уравнением R.
Если точку Ai вести по некоторой линии ) 0 О точка Аг описывает кривую р(Хг,Уг) О. Следовательно, механизм преобразователя устанавливает соот«y R2 (X3-aO2+(R2-a2i). ( ) +v R2(X3-aj)2+R2-a2 )YfJ «Y j X, {аз (Хз -а, )2+Y2 -а, Y| ±(а, -Х ) 35 ./R2 (Хз-а )2-t-() . -Ьз (.1±(,)- у КЧХз-а; )2-i-(R2-a2)Y2 } (а,-Х )а, ± t/R2 (Xj-a. )2+(R2-a)Y| Y +a (Xj-a, )2+(R2-a2 )Y2 2 -Ц
45
50
(5)
(X3-a,)2+Y2-aiY2±(a,-X3) /R2 (Xj-a, )2T(R2-a) 2+(а,-Хз )a, ± ±/R4X3-a, )2 + ( )Y2 2 .у2 }YJ {аз (X3-a,)2-fY| -a,Y2±(a,-x). /R2(X3-a,)2(R2-a2j)Y } ( )
(a, -Хз )a, ±
ППЛМ iijjeuu cjcsuBciiujiM анав.чиваег cuui- -i-/pTTv 2-7-5л1
ветствие .между плоскими полями точек .А, 1Хз-а,; +(R -а )-b(R2-a2 )Y| J Y +
и АЗ (Пг 5-Пз).
Аналитическая зависимость координат преобразуемой точки А от координат преоб+ а, (а, -Хз )2±/R2 (Xj-a, (
(6)
3.
разованной точки Ад (шфажается (прямое преобразование)
1-(1-К2 )
/R2 (1 +К2 )-К2 а|1 Х2 К2 а, а. +кз а Х -а, Хз ± (а -К2 Зз )/R2 (1 +К2 )-К2 а| , (1) ,()- (1+К2 )-K2a|l Y2 K(aj -a )
10 л(2)
15
20 ±i/R2 (Х -а )+ ( Уу -У
(/R2 (1+К2 -Хз ), где К tg Lf
В обратном преобразовании (фиг. 1)
,, )(Х2-а )+Y% (Х2-а1 ) v R2(X2-a3 )2 + (R2-a2 )у2 + (3)
(Xj -аз ) (Х -а, )+Y2 -Y (а -Х )а, Y (4)
25
Кинематическая цепь преобразователя кривых (фиг. 2) устанавливает соответствие
между полями точек А, и Aj (П,)
при неизменной оси преобразования q.
Аналитическая зависимость координат преобразуемой точки А, от координат преобразованной точки А} в. прямом преобразовании выражается
(Хз-а1)2+у2},(а,-Хз )
±/R. (, } (,а(
«y R2 (X3-aO2+(R2-a2i). ( ) +v R2(X3-aj)2+R2-a2 )YfJ «Y j X, {аз (Хз -а, )2+Y2 -а, Y| ±(а, -Х ) ./R2 (Хз-а )2-t-() . -Ьз (.1±(,)- у КЧХз-а; )2-i-(R2-a2)Y2 } (а,-Х )а, ± t/R2 (Xj-a. )2+(R2-a)Y| Y +a (Xj-a, )2+(R2-a2 )Y2 2 -Ц
(5)
45
50
(X3-a,)2+Y2-aiY2±(a,-X3) /R2 (Xj-a, )2T(R2-a) 2+(а,-Хз )a, ± ±/R4X3-a, )2 + ( )Y2 2 .у2 }YJ {аз (X3-a,)2-fY| -a,Y2±(a,-x). /R2(X3-a,)2(R2-a2j)Y } ( )
(a, -Хз )a, ±
+ а, (а, -Хз )2±/R2 (Xj-a, (
(6)
3.
313354884
В обратном преобразованииствие между плоскими полями точек А, и
А (ПтЧ Пг) при неизменной оси пре(а -X, )2+Y2 а, (аз-Х,)±образования q,.
1-3 1 Аналитическая связь между координа±/R2 (, )2 + (R2-a2Yf Хз (Зз-Хт JX,- 5тами соответственных точек этих полей вы-У2 (a3-Xi)2+(a,-а ), аз (аз-Х,)-ражается (в прямом преобразовании)
.(аз-Х, )2Х,-(аз-а-Х, )Y,O-(аз-X, )2+УУ (а,-X, ) X,
., ) + ()Yf . ±/R2 (а, -X, )2+(, )Yf (аз-Х, )
(аз-Х,)(а,-Х, )+УУ+{а,(аз-Х,)(аз-а,) +
(аз-Х,).У,а,(аз-Х,)±- (а, -X, Р-Y вз }У, . (9)
±/КЧаз-Х, )2+(R2-a2)(a3-X,)- (-х )2 ч-у (а, JY,
() (аз-Х, ) (,, Y ( us-X.)
±/КЧаз-Х, )(R2-apYfjY, . (В) (а,-Х )+У1 -У,+аз(аз-Х, ) (гц -X, )2 +
+y;lY,+a, (а,-аз )Y3 .(10)
Кинематическая цепь механизма преоб-2 j 2
разователя (фиг. 3) устанавливает соответ- 20В обратном преобразовании
{{ ±/рз -(a3-Xi)X,Yj -( ,)24-Y Yf +(a3-X,) (Xf -R )-2 (a -X,)X, Yfj +
+ Y3-(a3-X, )X,y, }na3-X,)-ai (аз-X )2+У 2 -У,+(аз-X, )(аз X, -Xf-Y )Y,±
±Y, /(аз-Х J4a3X-X -Y2 )-(аз-X,)2+Yn (аз-X,) (. )Xj-(R2-Y2 X }} X,
-{±/ Y3-(a3 -X,)X,Y,p(a3-x02+Y J Y: + (a3-X,)4xf-r)-2(a3-X,)X, YH +
+ Y,3-(a3-X, ),}(аз-Хт )a,-a, аз (аз-Х, )2+Yf Y, +(аз-Х,) (аз , )a3Y, ±азУ, /(a3-X,)4a3X -X2-Y2)-L(a3-X,)+Y2j.(a3-X,Xa3X,-X2-2YpX-(R2-Y|)Yf
(11)
{{±/Y|-(a3-X,)X,Y, 2-(аз-Х, )2+Yf J Y: + (a3-X )2 ( )-2 (аз-X,)X, Y +
+ Y,3-(a3-X, )X,Yj}(a3-X, )-a, (аз-Х, )2+у2 j .y, +( J (аз )i; ±
/(аз -X, Y (аз Xj -X2-Y2 Y - (Яз -X, Y +Y2 (аз -X, ) (аз X, -X -2Y2 )X- (R -Y/ П } } Y,
(аз-а, )Y, (a3-X,)XiYi±
(a3-X, )X;Y,2-(a3-X,)2+y2 j;Y +(a3-Xj)4X2-R2)-2(a3-X, )X,
(12)
В выражениях {1 -12) a,, a, и P - no-Преобразованию можно подвергнуть такстоянные параметры механизма. Изменениеже прямые с уравнениями У О и Ах 4
их осуществляется перестановкой шарни-+ By С О. Таким образом, преобразоваров Ot и Oj в прорези основания 1 и изме-45 ние прямой позволяет получить восемнаднением длины кривошипа 5.цать различных семейств алгебраических
Таким образом, предложенный механизмплоских кривых линий.
преобразователя позволяет получать шестьДля получения уравнения семейства крисемейств кривых, если подвергнуть преоб-вух необходимо из выражений (1 -12) для
разованию одну и ту же алгебра-ическую выбранного вида преобразования определинию.лить значения координат преобразуемой
Так, на фиг. 4 показано прямое, а наточки и подставить их вместо X и У в уравфиг. 5 - обратное преобразования прямойнение преобразуемой линии. Например, что42. и %, уравнение которой X а, при неиз-бы получить уравнение семейства кривых
менной оси преобразования q.,.(фиг. 5), достаточно из (3) определить знаНа фиг. 6 и 7, 8 и 9 показаны прямые и55 чение Xj и подставить его в уравнение Х а
обратные преобразования этой же прямой,вместо X, учтя при этом, что а, - R,
отвечающие соответственно кинематическимdj О. Тогда уравнение кривой q. приницепям механизмов на фиг. 2 и 3.мает вид (индекс «2 при X и У опущен)
,l2 (X + R )X-Y2 J 2 R( R+X ) (X2 +Y2 )(13)
Это кривая 4-го порядка.
Применение предложенного механизма позволяет повысить качество и производительность труда при выполнении графических работ.
Формула изобретения
Шарнирно-рычажный механизм преобразователя кривых на основе дву-двузнач- ного соответствия, содержащий две шарнир- но установленные на основании кулисы,
связанные между собой диадой, состоящей из двух шарнирно соединенных ползунов, траверсу с жестко закрепленным на одном- конце ползуном, связанную другим концом с одной из кулис второй диадой, состоящей из двух шарнирно соединенных ползунов, и кривошип, одним концом шарнирно установленный на основании, отличающийся тем, что, с целью повышения точности и расширения диапазона решаемых задач, ползун траверсы установлен на второй кулисе, а свободный конец кривошипа шарнирно соединен с одним из ползунов.
иг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-рычажный механизм для воспроизведения кривых | 1983 |
|
SU1113284A1 |
| Шарнирно-рычажный механизм преобразователя кривых на основе дву-двузначного соответствия | 1983 |
|
SU1121161A1 |
| Кулисно-рычажный механизм преобразования кривых | 1987 |
|
SU1482824A1 |
| Шарнирно-рычажный механизм гомологического преобразователя | 1981 |
|
SU962019A1 |
| Прибор для воспроизведения эллипса и гиперболы | 1980 |
|
SU901069A1 |
| Кулисно-рычажный механизм преобразователя кривых | 1981 |
|
SU992233A1 |
| Прибор для вычерчивания кривых | 1984 |
|
SU1194703A1 |
| Прибор для вычерчивания кривых | 1986 |
|
SU1341061A1 |
| Прибор для воспроизведения кардиоиды | 1990 |
|
SU1805063A1 |
| Кулисно-рычажный механизм преобразователя кривых | 1982 |
|
SU1058797A1 |
Изобретение относится к средствам механизации графических работ, в частности к шарнирно-рычажному механизму преобразователя кривых, и позволяет повысить точность и расширить диапазон решаемых задач. Механизм содержит шарнирно установленные в прорези основания кулисы 2, 3 и кривошип 5. На кулисе 3 установлен ползун, жестко закрепленный на конце траверсы 4, которая другим концом связана с кулисой 2 диадой из двух шарнирно соединенных ползунов 8 и 9; аналогичная диада из ползунов 6 и 7 связывает кулисы 2 и 3. Механизм устанавливает соответствие между точками Aj. кривой g и Aj кривой g,. В двух других вариантах механизма преобразователя кривошип 5 своим концом шарнирно соединен с одной из диад. 9 ил. (Л 00 со СП 4; 00 00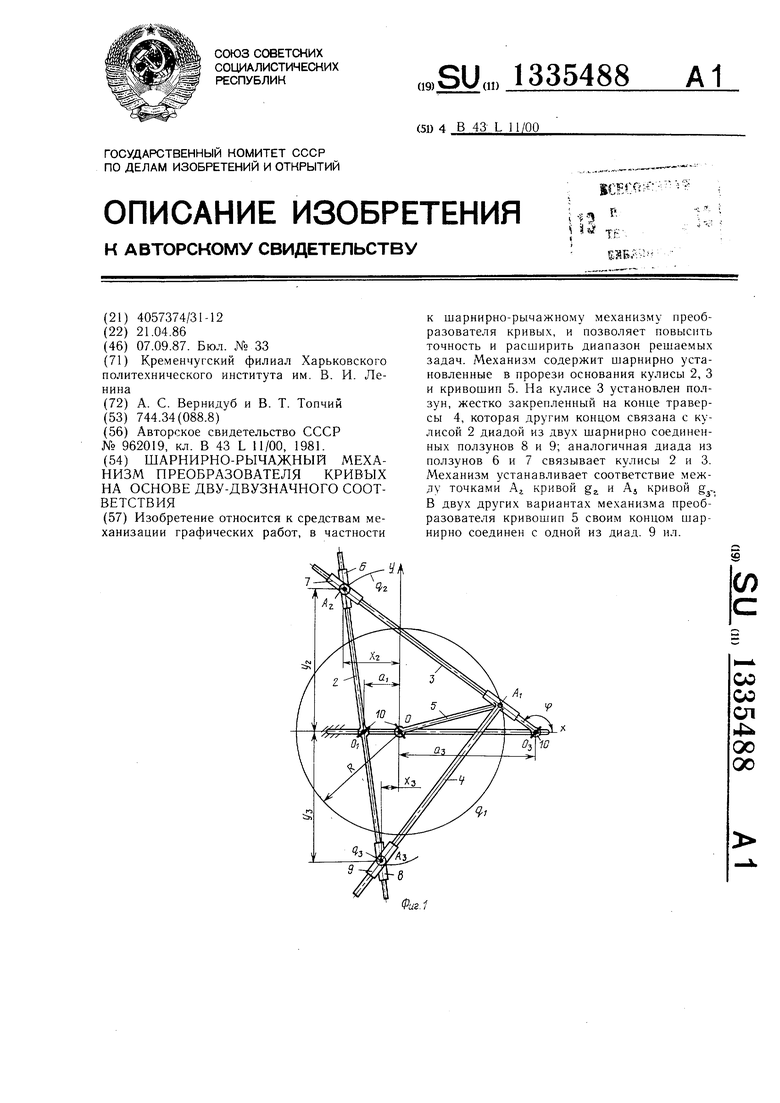
Iz
Фиг.5
Фиг. 6
Фиг. 9
Составитель Д. Гриценко
Редактор Г. ВолковаТехред И. ВересКорректор И. Муска
Заказ 3795/18Тираж 329Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Шарнирно-рычажный механизм гомологического преобразователя | 1981 |
|
SU962019A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
