(54) КУЛИСНО-РЫЧАЖНЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАТЕЛЯ
1
Изобретение относится к средствам механизации . графических работ, в частности к механизмам для преобразования кривых линий.
Преобразователь .может быть использован для синтеза механизмов, предназначенных для воспроизведения алгебраических кривых. Эти механизмы могут найти применение в проектных и конструкторских организациях для вычерчивания кривых линий, встречающихся при разработке чертежей. Кроме того, кинематическая схема преобразователя может быть использована при конструировании механизмов, рабочие органы которых должны вести некоторую точку по заданной траектории.
Известен кулисно-рычажный механизм преобразователя кривых, содержащий шарнирно установленную на основании кулису с двумя ползунами, установленный на неподвижной направляющей ползун с траверсой и щатун, шарнирно соединенный с одним из ползунов кулисы и связанный крестообразным ползуном с траверсой 1).
Недостатком известного механизма является то, что он осуществляет преобразование кривых линий при неизменной прямоКРИВЫХ
линейной направляющей. Поэтому вид и форма преобразованной кривой ограничены. Кроме ТОГО; он не может быть настроен для проебразования кривых с разными параметрамн.
5 Цель изобретения - расщирение диапазона рещаемых задач и упрбщение настройки. Для достижения поставленной цели кулисно-рычажный механизм преобразователя кривых, содержащий щарнирно установлен Q ную на основании кулису с двумя ползунами, установленный на неподвижной направляющей ползун с траверсой и щатун, щарнирно соединенный с одним из ползунов кулисы и связанней крестообразным ползуном с траверсой, имеет телескопический кривощип и
15 ползун, установленный на траверсе и щарнирно соединенный с ползуном кулисы, при этом свободный конец кривощипа имеет щарнир для соединения с одним из ползунов.
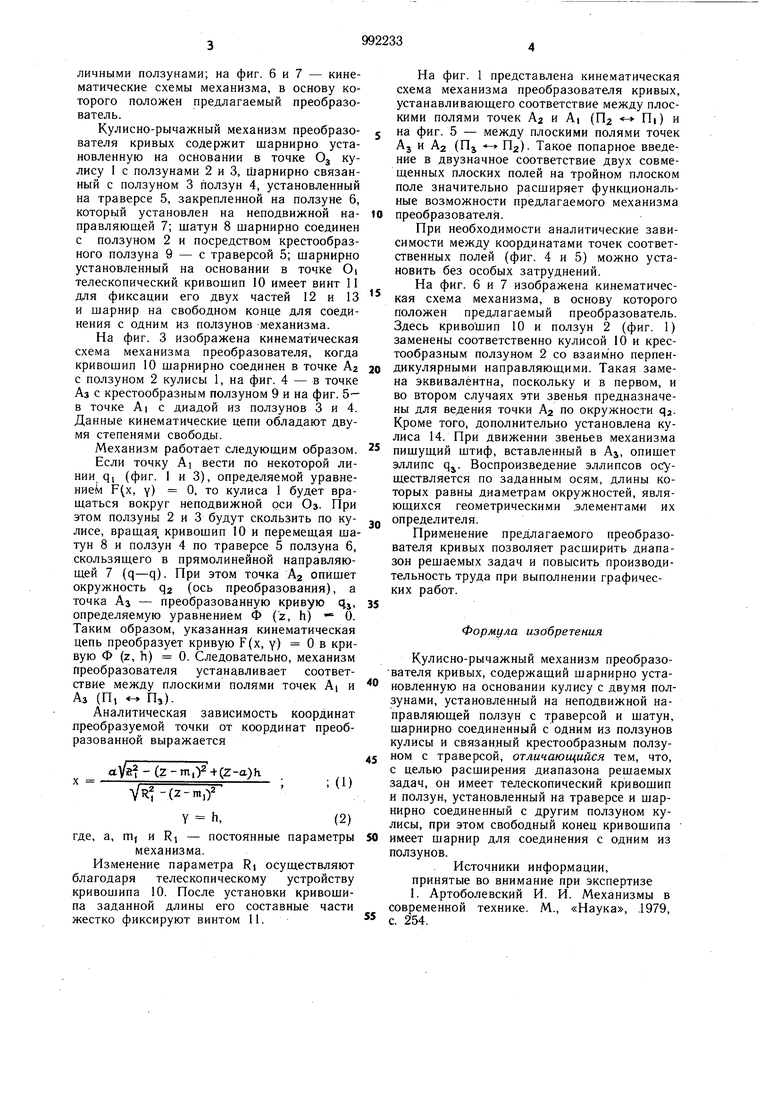
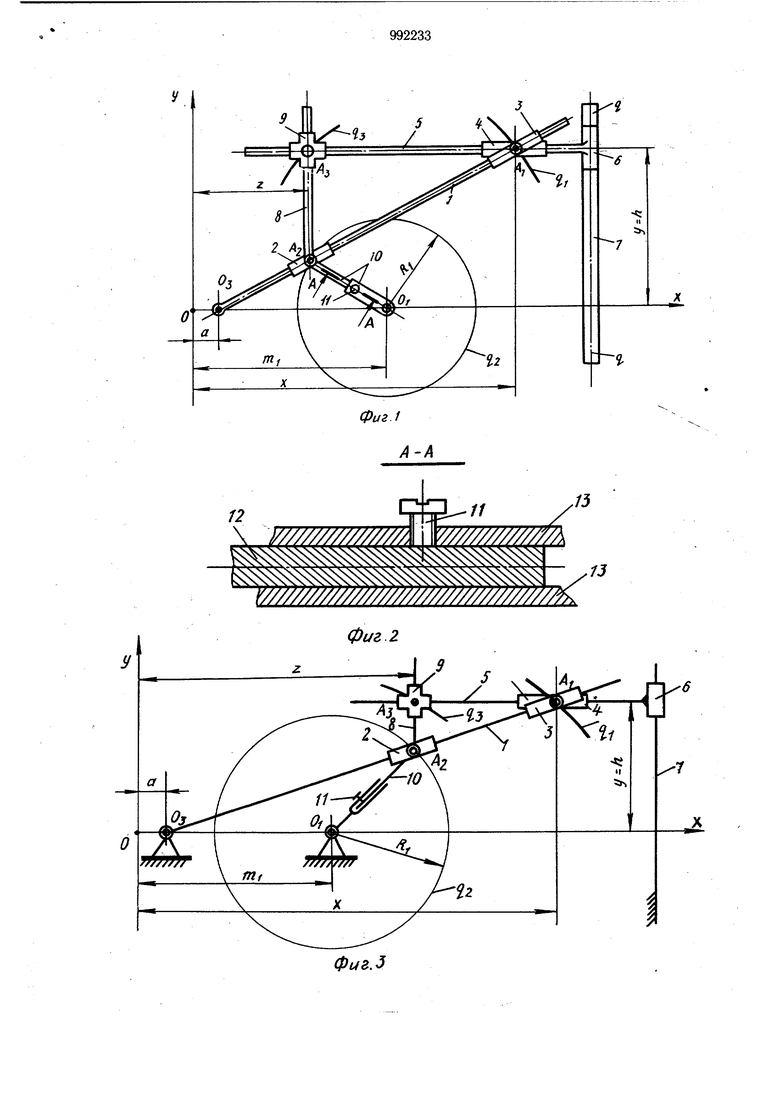
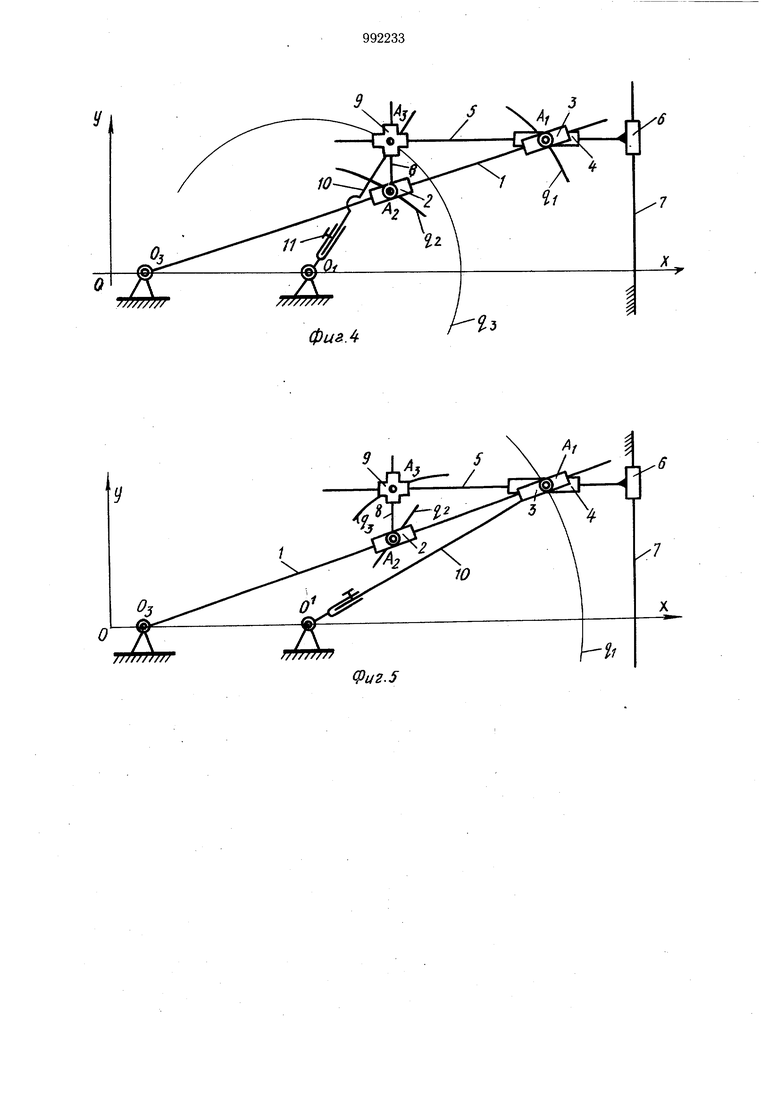
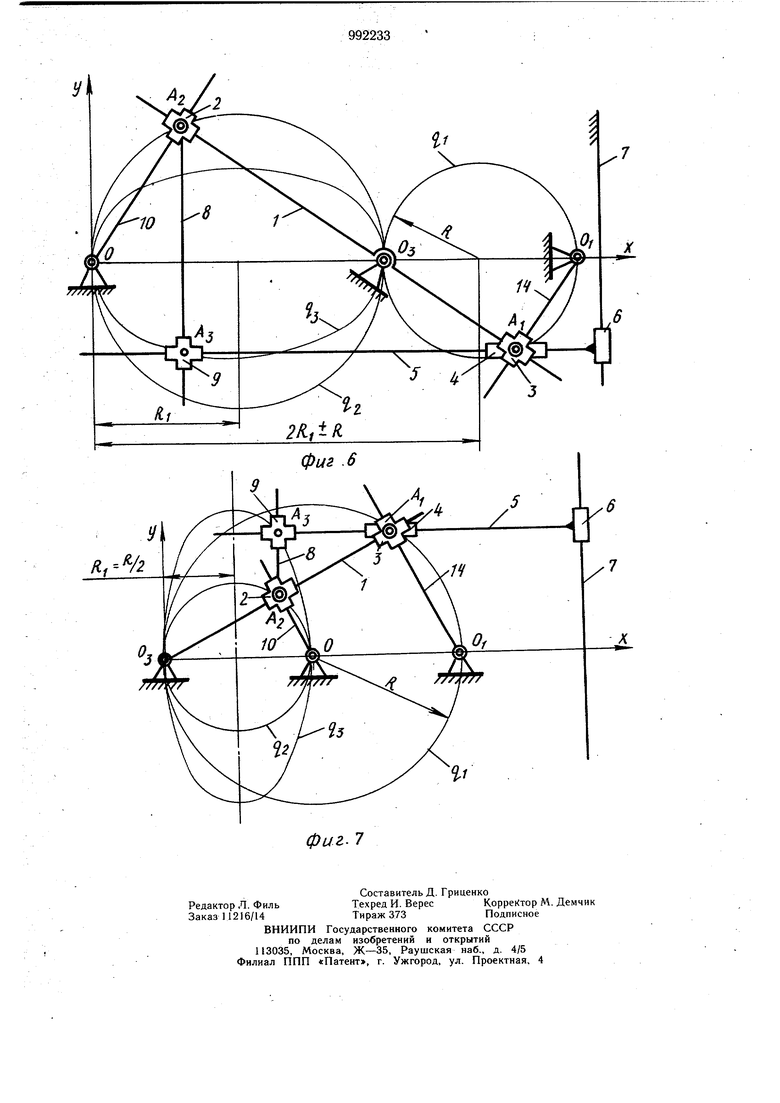
На фиг. 1 изображен предлагаемый преобразователь кривых, вид сверху; на фиг 2- разрез А-А на фиг. 1 (устройство телеско- , пического кривощипа); на фиг. 3 - 5 - кинематические схемы преобразователя, у которого кривошип ша.рнирно связан с различными ползунами; на фиг. 6 и 7 - кинематические схемы механизма, в основу которого положен предлагаемый преобразователь. Кулисно-рычажный механизм преобразователя кривых содержит шарнирно установленную на основании в точке Oj кулису I с ползунами 2 и 3, шарнирно связанный с ползуном 3 ползун 4, установленный на траверсе 5, закрепленной на ползуне 6, который установлен на неподвижной направляющей 7; шатун 8 шарнирно соединен с ползуном 2 и посредством крестообразного ползуна 9 - с траверсой 5; шарнирно установленный на основании в точке Oi телескопический кривошип 10 имеет винт 11 для фиксации его двух частей 12 и 13 и шарнир на свободном конце для соединения с одним из ползунов-механизма. На фиг. 3 изображена кинематическая схема механизма преобразователя, когда кривошип 10 шарнирно соединен в точке AZ с ползуном 2 кулисы 1, на фиг. 4 - в точке АЗ с крестообразным ползуном 9 и на фиг. 5- в точке А| с диадой из ползунов 3 и 4. Данные кинематические цепи обладают двумя степенями свободы. Механизм работает следующим образом. Если точку А вести по некоторой линии Qi (фиг. 1 и 3), определяемой уравнение 1 F(x, Y) 0. то кулиса 1 будет врашаться вокруг неподвижной оси Оз. При этом ползуны 2 и 3 будут скользить по кулисе, врашая кривошип 10 и перемещая шатун 8 и ползун 4 по траверсе 5 ползуна 6, скользящего в прямолинейной направляющей 7 (q-q). При этом точка А2 опишет окружность qa (ось преобразования), а точка АЗ - преобразованную кривую qj, определяемую уравнением Ф (2, h) 0. Таким образом, указанная кинематическая цепь преобразует кривую F(x, Y) О в кривую Ф (z, h) 0. Следовательно, механизм преобразователя устанавливает соответствие между плоскими полями точек AI и АЗ (П, Пэ). Аналитическая зависимость координат преобразуемой точки от координат преобразованной выражается дуй - (2 - m|) -+ (z-a)h VRl-(2-raOY h,(2) где, а, m| и Ri - постоянные параметры механизма. Изменение параметра Rt осуществляют благодаря телескопическому устройству кривошипа 10. После установки кривошипа заданной длины его составные части жестко фиксируют винтом 11. На фиг. 1 представлена кинематическая схема механизма преобразователя кривых, устанавливающего соответствие между плоскими полями точек А2 и AI (Па « П|) и на фиг. 5 - между плоскими полями точек AJ и АЗ (П - П). Такое попарное введение в двузначное соответствие двух совмещенных плоских полей на тройном плоском поле значительно расширяет функциональные возможности предлагаемого механизма преобразователя. При необходимости аналитические зависимости между координатами точек соответственных полей (фиг. 4 и 5) можно установить без особых затруднений. На фиг. 6 и 7 изображена кинематическая схема механизма, в основу которого положен предлагаемый преобразователь. Здесь кривошип 10 и ползун 2 (фиг. 1) заменены соответственно кулисой 10 и крестообразным ползуном 2 со взаимно перпендикулярными направляющими. Такая замена эквивалентна, поскольку и в первом, и во втором случаях эти звенья предназначены для ведения точки АЗ по окружности qa. Кроме того, дополнительно установлена кулиса 14. При движении звеньев механизма пищущий щтиф, вставленный в Aj, опишет эллипс qj. Воспроизведение эллипсов осуществляется по заданным осям, длины которых равны диаметрам окружностей, являющихся геометрическими .элементами их определителя. Применение предлагаемого преобразователя кривых позволяет расширить диапазон решаемых задач и повысить производительность труда при выполнении графических работ. Формула изабретения Кулисно-рычажный механизм преобразователя кривых, содержаший шарнирно установленную на основании кулису с двумя ползунами, установленный на неподвижной направляющей ползун с траверсой и шатун, шарнирно соединенный с одним из ползунов кулисы и связанный крестообразным ползуном с траверсой, отличающийся тем, что, с целью расширения диапазона решаемых задач, он имеет телескопический кривошип и ползун, установленный на траверсе и шарнирно соединенный с другим ползуном кулисы, при этом свободный конец кривошипа имеет шарнир для соединения с одним из ползунов. Источники информации, принятые во внимание при экспертизе 1. Артоболевский И. И. Механизмы в современной технике. М., «Наука, .1979, с. 254.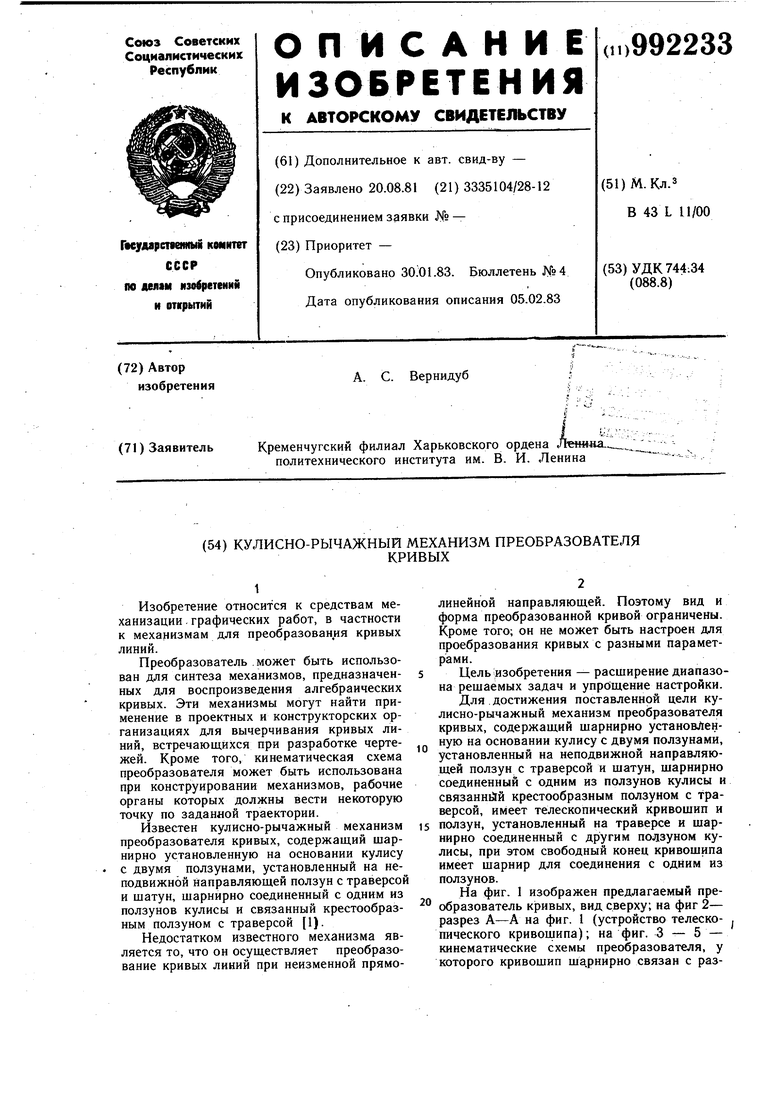
12
фив.
фиг. 2
