1
Изобретение относится к средствам механизации графических работ, в частности к механизмам для преобразования кривых линий.
Известен шарнирно-рычажный механизм преобразователя кривых на основе дву-двузначного соответствия содержащий шарнирно установленные на основании кулисы и подвижную относительно направляющей траверсу, образующую с кулисами треугольник, в двух вершинах которого расположены соединяющие кулисы с траверсой диады С1 J.
Однако известный механизм характеризуется недостаточной точностью воспроизведения кривой, а также сложностью выполнения процесса построений из-за необходимости подбора кривошипа заданной длины и его смены.
Целью изобретения вяляется повышение точности и упрощение выполнения построений.
Поставленная цель достигается те I что шарнирно-рычажный механизм преобразователя кривых на основе двудвузначного. соответствия, содержащий шарнирно установленные на основании кулисы и подвижную относитель но направляющей траверсу, образующую с кулисами треугольник, в двух вершинах которого расположены соединяющие кулисы с траверсой диады, имеет дополнительную диаду, расположенную в третьей вершине треугольника и состоящую из двух шарнирно соединенных ползунов, один из которых поступательно связан с одной из кулис, а .другой шарнирно соединен с второй кулисой, при этом шарниры, соединяющие кулисы с основанием, выполнены переставными.
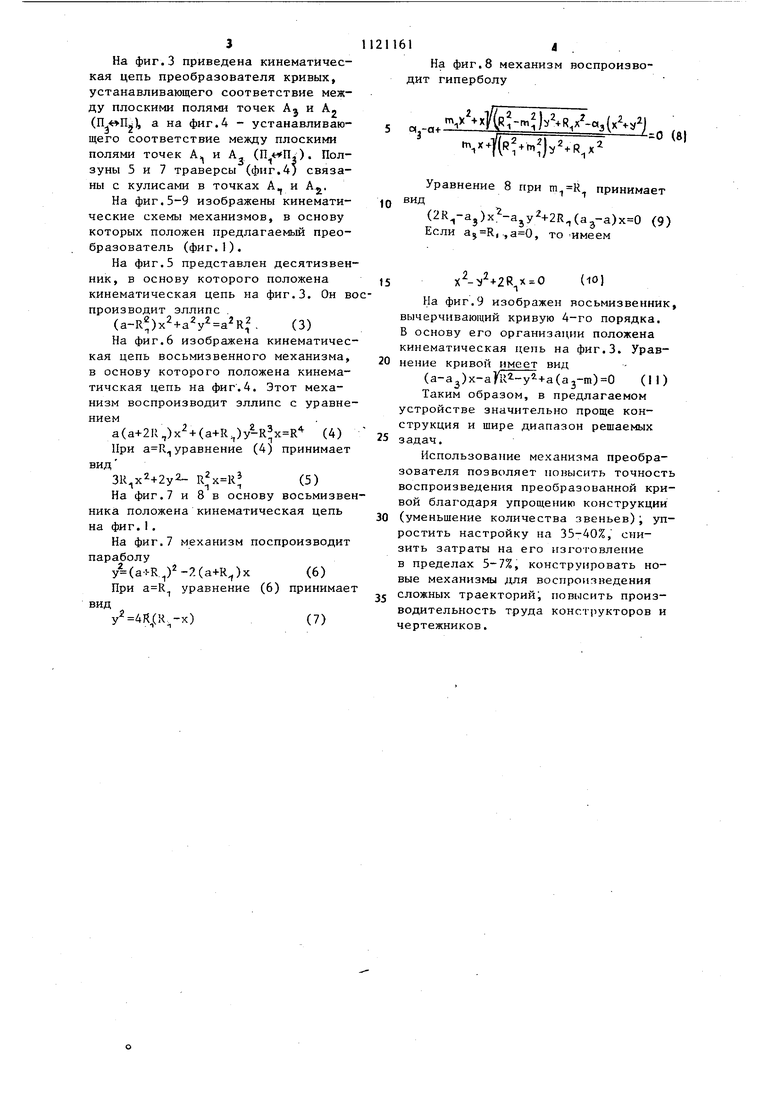
На фиг.1 изображен предлагаемый преобразователь кривых на фиг.2 разре§ Д-А на фиг.1; на фиг.3-9 варианты предлагаемого механизма.
Кулисы 1 и 2 подвижно связаны с основанием в точках 0 и 0 с помощью переставных шарниров, жестко закрепленных в прорези Г основания (фиг.1). Траверса 3, установленная на неподвижной направляющей q-q е возможностью перемещения, подвижно связана с кулисами 1 и 2. При том кулиса 2 связана с траверсой 3 в точке А диадой из шарнирно соединенных ползунов 4 и 5, а кулиса
1612
1 - в точке АЗ такой же диадой из ползунов 6 и 7. Кулиса 2 входит в поступательную пару с ползуном 8, образующим вращательную пару с переставным вдоль кулисы 1 ползуном 9, который жестко фиксируется винтом 10 (фиг.1 и 2). Переставные шарниры 0 и Oj в прорези Г основания жестко фиксируются с помощью гаекбарашек 11.
На фиг.З изображена кинематическая цепь преобразователя, когда переставной по кулисе 2 ползун 4 образует в точке А вращательную пару с ползуном 5, скользящим по траверсе 3. На фиг.4 переставной по кулисе 1 ползун 6 вступает в точке Ag во вращаетельную пару с ползуном 7, образукщим поступательную пару с траверсой 3.
Данные кинематические цепи обладают двумя степенями свободы.
Преобразователь работает следующим образом.
Если точку А; вести по некоторой линии q (фиг.1), определяемой уравнением F(x ,у)0, то кулисы: 1 н 2 будут вращаться вокруг осей шар ни- ров 0 и Oj , а траверса 3 - плоскопараллельно перемещаться по неподвижной прямолинейной направляющей q-q. При этом точка А будет перемещаться по окружности q., так как ползун 9 жестко зафиксирован на кулисе 1 с помощью винта 10, а точка. А, диады из ползунов 6 и 7 опишет
3Л
кривую q, определяемую уравнением ф(х,,у-)0. Таким образом, указанная кинематическая цепь преобразует кривую F(x,yj)0 в кривую ф(х,,у.)0. Следовательно, механизм преобразователя устанавливает соотетствие между плоскими полями точек А и AJ ().
Аналитическая зависимость координат преобразуемой точки А от координат преобразованной точки А выражается
К
(«1
(2)
гдеа;з и R - постоянные параметры
механизма.
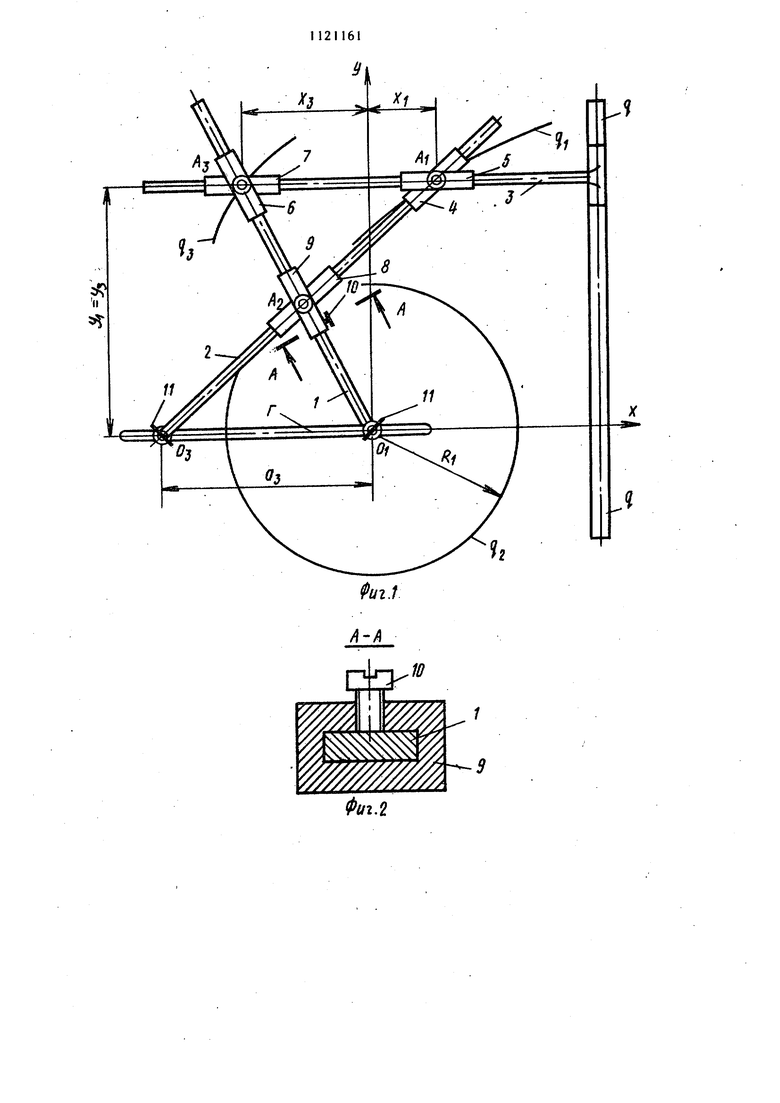
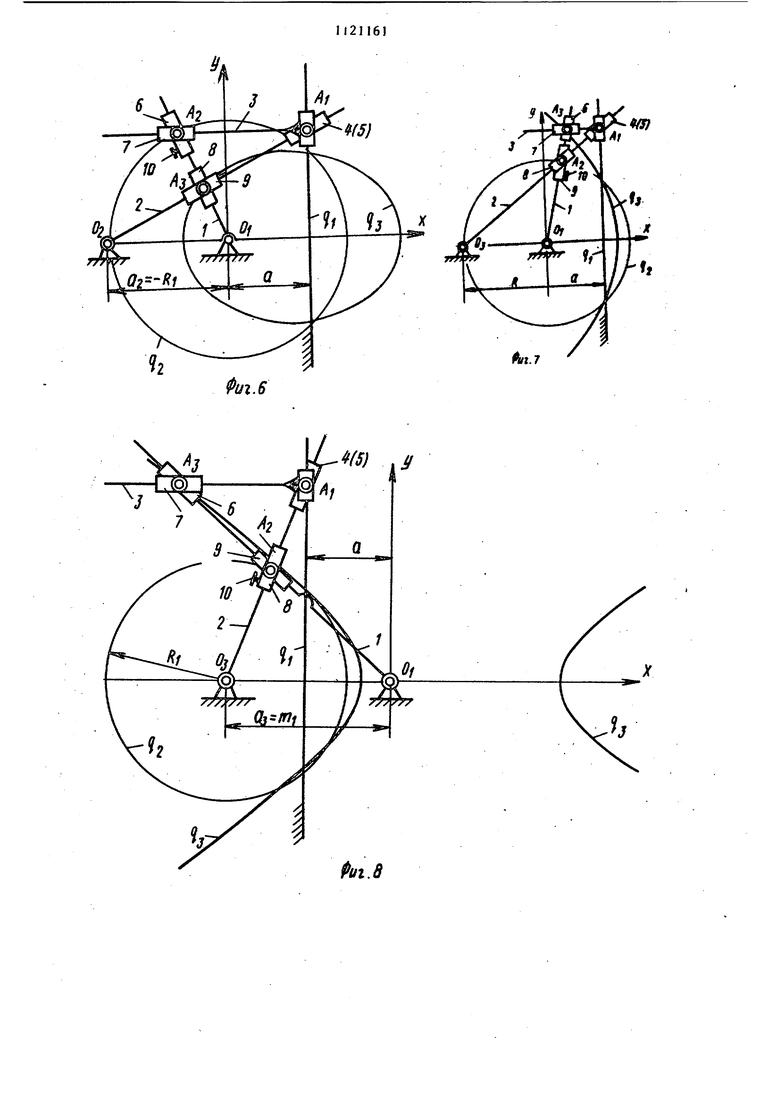
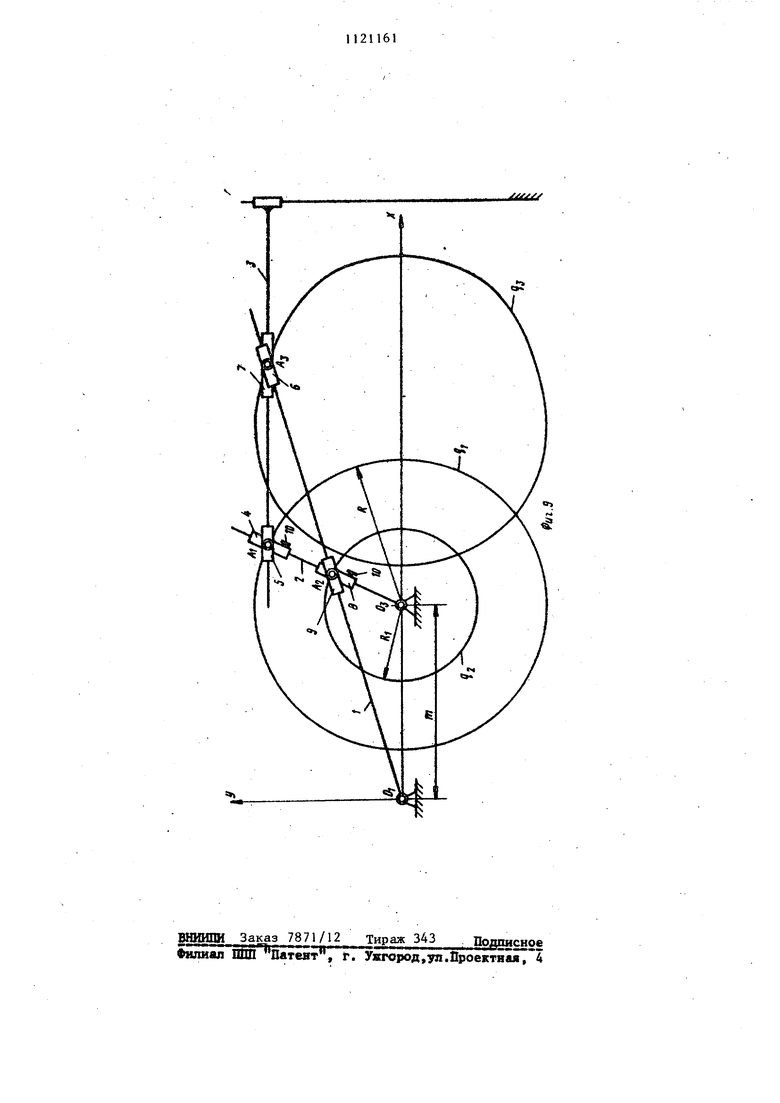
Изменение параметра R осуществляется путем перестановки ползуна 9 вдоль траверсы 1 с последующим фиксированием с помощью винта 10. На фиг.З приведена кинематическая цепь преобразователя кривых, устанавливающего соответствие между плоскими полями точек Aj и А. (), а на фиг.4 - устанавливающего соответствие между плоскими полями точек А и А (П.П,). Ползуны 5 и 7 траверсы (фиг,4) связаны с кулисами в точках А и А. На фиг.5-9 изображены кинематические схемы механизмов, в основу которых положен предлагаемый преобразователь (фиг.1). На фиг.5 представлен десятизвен ник, в основу которого положена кинематическая цепь на фиг.З. Он в производит эллипс . (а-К)к2 + , (3) На фиг.6 изображена кинематичес кая цепь восьмизвенного механизма, в основу которого положена кинематичская цепь на фиг.4. Этот механизм воспроизводит эллипс с уравне нием a(a+2R,)x + (a+R) (4) При a R уравнение (4) принимает вид 3R x +2y2- (5) На фиг.7 и 8 в основу восьмизве ника положена кинематическая цепь на фиг.I. На фиг.7 механизм поспроизводит параболу y(a-bR/-.(a+R)x (6) При уравнение (6) принимае (R.-x) 61а На фиг.8 механизм воспроизводит гиперболу о,-а..с. ():, Уравнение 8 при принимает ВД ()x: -ajy2+2R(a3-a) (9) Если ,.,, тоИмеем На фиг.9 изображен восьмизвенник, вычерчивающий кривую 4-го порядка. Б основу его организации положена кинематическая цепь на фиг.З. Уравнение кривой имеет вид (а-а2)(аз-т)0 (II) Таким образом, в предлагаемом устройстве значительно проще конструкция и щире диапазон решаемых задач. Использование механизма преобразователя позволяет повысить точность воспроизведения преобразованной кривой благодаря упрощению конструкции (уменьшение количества звеньев) , упростить настройку на 35-40%, снизить затраты на его изготовление в пределах 5-7%, конструировать новые механизмы для воспроизведения сложных траекторийi повысить производительность труда конструкторов и чертежников.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-рычажный механизм преобразователя кривых на основе дву-двузначного соответствия | 1986 |
|
SU1335488A1 |
| Кулисно-рычажный механизм преобразователя кривых | 1981 |
|
SU992233A1 |
| Шарнирно-рычажный механизм гомологического преобразователя | 1981 |
|
SU962019A1 |
| Прибор для воспроизведения эллипса и гиперболы | 1980 |
|
SU901069A1 |
| Кулисно-рычажный механизм преобразователя кривых | 1982 |
|
SU1058797A1 |
| Кулисно-рычажный механизм преобразования кривых | 1987 |
|
SU1482824A1 |
| Прибор для вычерчивания кривых второго порядка | 1980 |
|
SU925682A1 |
| Прибор Салькова для воспроизведения кривых второго порядка | 1986 |
|
SU1361024A1 |
| Шарнирно-рычажный механизм для воспроизведения кривых | 1983 |
|
SU1113284A1 |
| Кулисно-рычажный механизм для вычерчивания кривых | 1982 |
|
SU1044471A1 |

ШАРНИРНО-РЫЧА}КНЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАТЕЛЯ КРИВЫХ НА ОСНОВЕ ДВУ-ДВУЗНАЧНОГО СООТВЕТСТВИЯ, содержащий шарнирно установленные на основании кулисы и подвижн то относительно направляющей траверсу, образующую с кулисами треугольник, в двух вершинах которого расположены соединяющие кулисы с траверсой диады, отличающийс я тем, что, с целью повышения точности и упрощения выполняемых построений, он.имеет дополнительную диаду, расположенную в третьей вершине треугольника и состоящую из двух шарнирно соединенных ползунов, один из которых поступательно связан с одной из кулис, а другой шарнирно соединен с второй кулисой, при этом шарниры, соединяющие кулисы с основанием, выполнены переставными.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шарнирно-рычажный механизм гомологического преобразователя | 1981 |
|
SU962019A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
