(54) КАЧАЮЩИЙСЯ ПИТАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибропитатель | 1978 |
|
SU662446A1 |
| Устройство для ориентирования изделий | 1982 |
|
SU1121207A1 |
| Устройство для очистки наружной поверхности трубчатых теплообменников | 1980 |
|
SU903690A1 |
| Устройство для сборки и сварки кабин | 1974 |
|
SU518312A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |
| Качающийся питатель | 1976 |
|
SU941629A1 |
| Вибрационный питатель | 1983 |
|
SU1093649A1 |
| Тормозный регулятор числа оборотов | 1931 |
|
SU29371A1 |
| Устройство для загрузки люлек подвесного конвейера | 1986 |
|
SU1426899A1 |
| АППАРАТ ИСКУССТВЕННОГО КРОВООБРАЩЕНИЯ | 1966 |
|
SU177593A1 |
1
Изобретение относится к подъемно-транспортному машиностроению и .может быть использовано в горном деле для выпуска из емкостей полезного ископаемого и погрузки на транспортные средства.
Известны качающиеся питатели, состоящие из рабочего органа в виде подвижного стола, смонтированного на раме с помощью опор качения и механического привода возвратно-поступательного движения, который через гибкие связи взаимодействует с подвижным столом 1.
Недостатком этого питателя является громоздкость конструкции, а также невозможность изменять величину хода стола во время работы, что не позволяет использовать его в автоматизированных системах по переработке минерального сырья.
Наиболее близким к предлагаемому является качающийся питатель, включающий неподвижное основание с установленным на нем подвижным столом с упорами, цилиндр с порщнем и щтоком 2.
Недостатком известной конструкции качающегося питателя является невозможность регулирования его производительности.
Цель изобретения - регулирование производительности.
Поставленная цель достигается тем, что упоры установлены под углом к длинной оси стола, .между которыми размещен шток, имеющий тело качения, а цилиндр закреплен щарнирно на основании с возможностью изменения угла наклона щтока к упорам посредство.м .механизма поворота.
/Механизм поворота может быть выполнен из дополнительного цилиндра со щтоком,
10 щарнирно установленным между основанием и тыловой частью основного цилиндра.
Причем .механизм поворота может быть выполнен в виде винтовой пары, винт которого подвижно закреплен на основании, а гайка щарнирно закреплена на тыловой
15 части цилиндра.
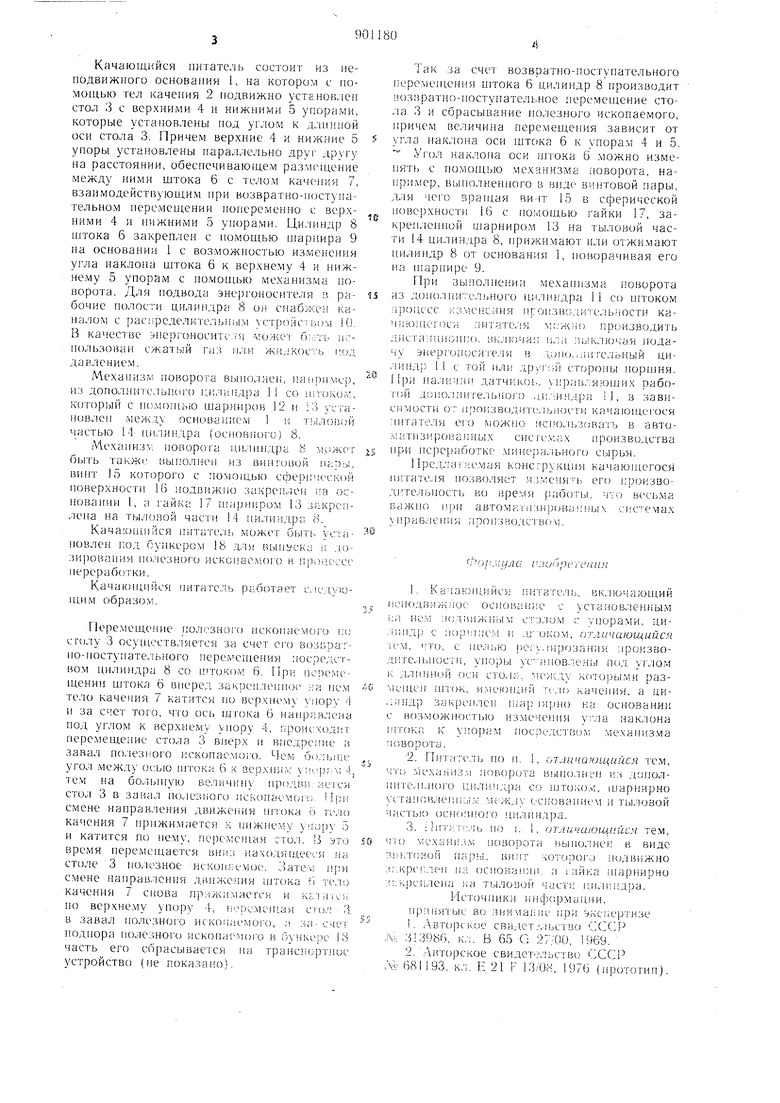
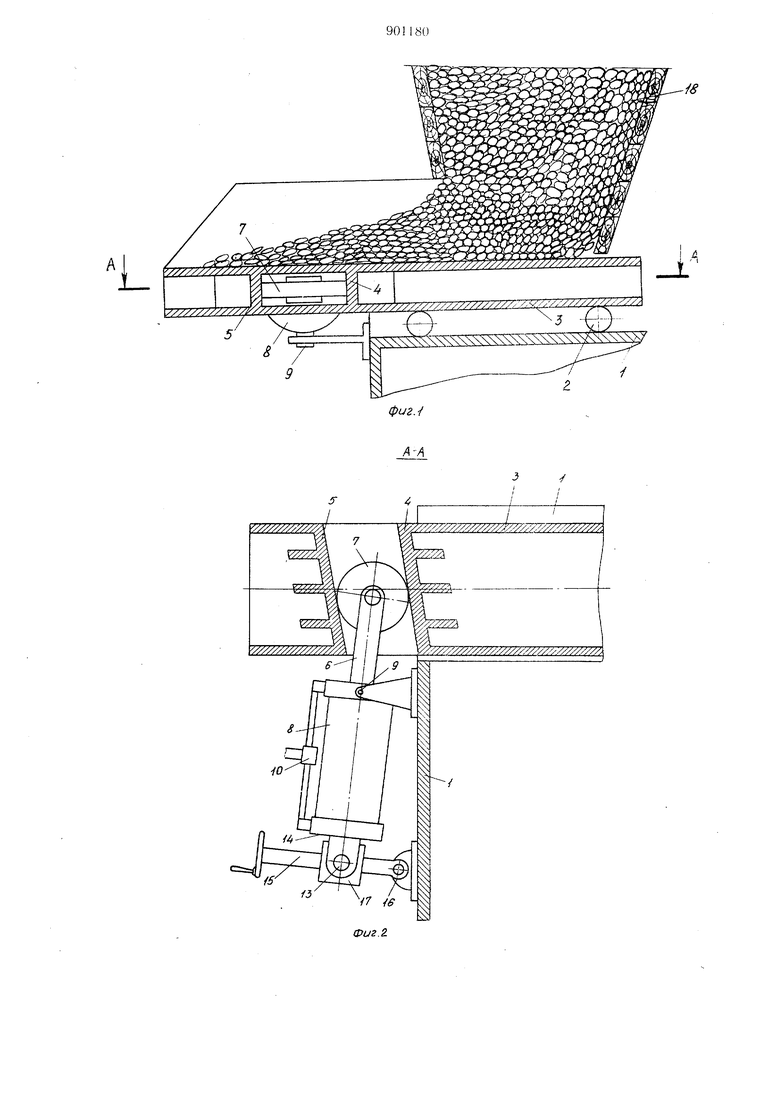
На фиг. 1 показана принципиальная схе.ма качающегося питателя, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; 20 на фиг. 3 - пример выполнения механизма поворота дополнительным цилиндром со щтоко.м, щарнирно установленны.м .между основанием и тыловой частью основного цилиндра. Качающийся питатель состоит из неподвижного основания К на котором с помоп1ью тел качения 2 подвижно установлен стол 3 с верхними 4 и нижними 5 упорами, которые устаноЕ5лены под углом к длинной оси стола 3. Причем верхние 4 и нижние 5 упоры установлены парал. друг другу на расстоянии, обеспечивающем размещение между iiHMH штока 6 с телом качепкя 7, взаимодействуюи им при возвратно-ностунательном перемеп1,ении нонере.менпо с верхними 4 и нижними 5 унорами. Цилиндр 8 щтока 6 закреплен с иомоа(ью niaprinpa 9 на основании 1 с возможностью изменения угла наклона щтока 6 к верхнему 4 и нижнему 5 упорам с HOMonibK) ме.хапизма поворота. Для подвода энсргоносителя з рибочие полости цилипдра 8 оь спабже; каналом с )асиределитель 1ым устройс-п()л К), В качестве чпергопосито может бь;ть использован сжатый газ или жидкость 1;()д давлением. Механизм поворота выполнен, ваприме;), из донолиптельиого 1:,|;л111Ы15а 1 1 со uiroixOA, KOTOpi ni с помощью щарнирок 12 и :3 уитаиовлеп между основа инем 1 ; т)Л()13ой частью 14 ии.тиндра (ocHOBiUJi-o) 8. Механизм поворота цилиндра 8 лк;жет быть также выполнен из випгслнзй пары, винт 15 которого с помондьк) сферической поверхности 16 ; одвиж11О закре лен па основании 1, а гайка 17 нарниром 13 закреплена па чаети 14 п.и;п-1ндр;1 8. Кача О1ДиЯся питатель может быть установлен под бу 1кером 18 для и .юзирования полезного. ископаелюго в npi.)iK4:ce перерабсугки. Качакицпйся питаге; Ь работает елед /ю1ПИМ образо.1. 11ере. 1 олезно о иекопаемс)о i:i; с голу 3 осуплсств-ляется за счет его возвуатно-постунательного переменгения посредством иилинд11а 8 со нтоком 6. Ipii пспемс-щении щтока 6 вперед закрен, ;;а IICM тело качения 7 катится по верхнему viiopy -I и за ечет того, что ось щтока 6 нан|1авлема под углом к верхнему упору 4, мрО и:ход1гг пере.мещенис стола 3 вверх и впедре:1ие , завал по.тезгюго ncKonaeMOix). Чем 6ib;biiie угол осью нлока 6 к sepxtuiiv; упорг-м 4, те.м fa болыную величину 11ро;;,ви .;-и.г1ся стол 3 в завал H(x.ie3iioro исконаемо ;; Ilpii смене направления движения н.гг()ка о тело качения 7 прижи.маетея к нижиему упору 5 и катитея по нему, пе|)емеилая стол. 13 ато время пе)емещается Btni;; нах{)дя1де(ся на столе 3 11о;1езное исконяемое. Затсу при смене направ.тения движения ujTciKa ri тел;) качения 7 снова пр:-1Жиу|ае1ся н кг,. но верхнему упору 4, iiepcMeniaa сто,; 3 в завал полезного искон имого, : за-счет нодпора 11олезног(.| ископаемого в oyviKepe 18 часть его сбрасывается иа трансюртнос устройство (не ноказано). Так за счет возвратно-поступательного пере.1ен1ения И1тока 6 цилиндр 8 производит возвратио-поступательное неременгение стола 3 и сбрасывание полезпого ископаемого, ьричем величина перемепдепия зависит от угла наклона оси гитока 6 к упорам 4 и 5. Уг(;л наклона оси ппока 6 .можно изменять е помощью механизма поворота, нанри.мер, вьпюлнеппого в впдс винтовой пары, для чего зpaнJ;aя вичт 15 в еферической поверхности 16 с .ью ;айки 17, закрегктеппой нгарниро.м 13 па ты.ловой части 14 пилиндра 8, прижимают или отжимают ни.тиндр 8 ОТ основания 1, новорачивая его на щарьире 9. При выполнении меха1П1зма поворота из допо.тнительпого пнлиидра 1 1 со пггоком п)опесе гоизвсутительноети кач;;к)Н1.ог;)си аитателя мсжги) производить диеталпионио. в слюча:; или : ь:к;по-;ая пода4V энергои(}си1еля в i,uiio,.;in гс;1опый ци.П1ПДР 1 1 с той или дрсг-ой CTOpOlHil ИОрП1НЯ. I (ри па.;1ич;п1 датчиков. ,:яюп их работ(;й динолп11те,тьно1о дилиндра 1, в зависимости О: п)оизводите..1ьносги кана1О1ие1ося :пггателя его мо)п() ncno,:nj3(jBaTb в автоматизированных сие гемах производства при )еработке мипера.;1ьпого сырья. Предлагаемая копегрукипя качаюп1егосЯ Н1;1ате.:1я позволяет изменип его нроиззод тельноеть во прем я работы, что BcciiMa важно прп автомаТ| знрова ; - ЫХ сис смах Vправленпи иропзводством. 1.Качакяп.ийеи insTaTe/nj, В1 лючаю1ций пеподвмж; ое осно15апие с устапов;1еп1 ым La пем а ;Д1И1Жпь ; сто/юм с упорами, ;гилпндр с поршнем и .уоком, атличающийся iCM, ТО, с пе. perv. 1И|;озапми лроизвод гге,1ьпос1и, т1о;)ы ус ; новле;11з1 под УГЛОМ к длинной оси стола, MiVK/iy кот01)ь1ми размещен ппок, и:чек)п.;ий г.ло качения, а ци, закреп.лен inap IMJ.IHO на оенованин с возмож:ност1 1о .мечепия уг.ла паклопа пггока поспеллллюл; механизма ;к:;ворота. 2. Питатель по п. 1, огличан)щийся тем, что MexatiH3.i поворсуга выно,лнеп из дополнптел1Л1О1о )а со HJTOKOA;, нарнирно ч-танов,лепиз У: меж, c cHOBannt M и тьгловой )1() оснозпого пилиндра. 3. ; |Г|;уге.;ь по i. 1, (Лличиюш.ийся тем, 410 vtexa -n:3M юворота 1 ыиолне1-; в виде (}ной |1аг)ы. кото;)ОГч) подвижно зукр1м:лен на основании, а айка iHapfinpHo ;-;;лчренлена и тыловой часчл; )а, И елч) ч i I и к и н н ij)o р м а п и н, во знима1:ие ир;-: жсиертизе . Авторское евидет. СХКЛ . 313986, кл. В 65 G 27/00, 1969. 2..Лвторекое свидетельство СССР 681193. кл. Е 21 F 13/Ой, 1976 (нрототин).
L
S
