1:)
средства при его стабилизации ча счет сохранения координаты центра масс неич- менной, УстроГ1ств 5 содержит платформу 1, на которой установлен маятниковый датчик 4 углов наклона, в корпусе которого размещен отвес 5, исполнительные гидроцилиндры 2 опор 3, соединенные напорными и сливными гидромаги- стралями с гидрораспределителями 30, в свою очередь соединенными через релейные усилители 18 с электрически
1
Изобретение относится к устройствам для стабилизации горизонтального положения платформы транспортного средства относительно излучателей сейсмических колебаний, установлен- ных на платформе.
Цель изобретения - повышение устойчивости транспортного средства при его стабилизации за счет сохранения положения координаты центра масс неизменной.
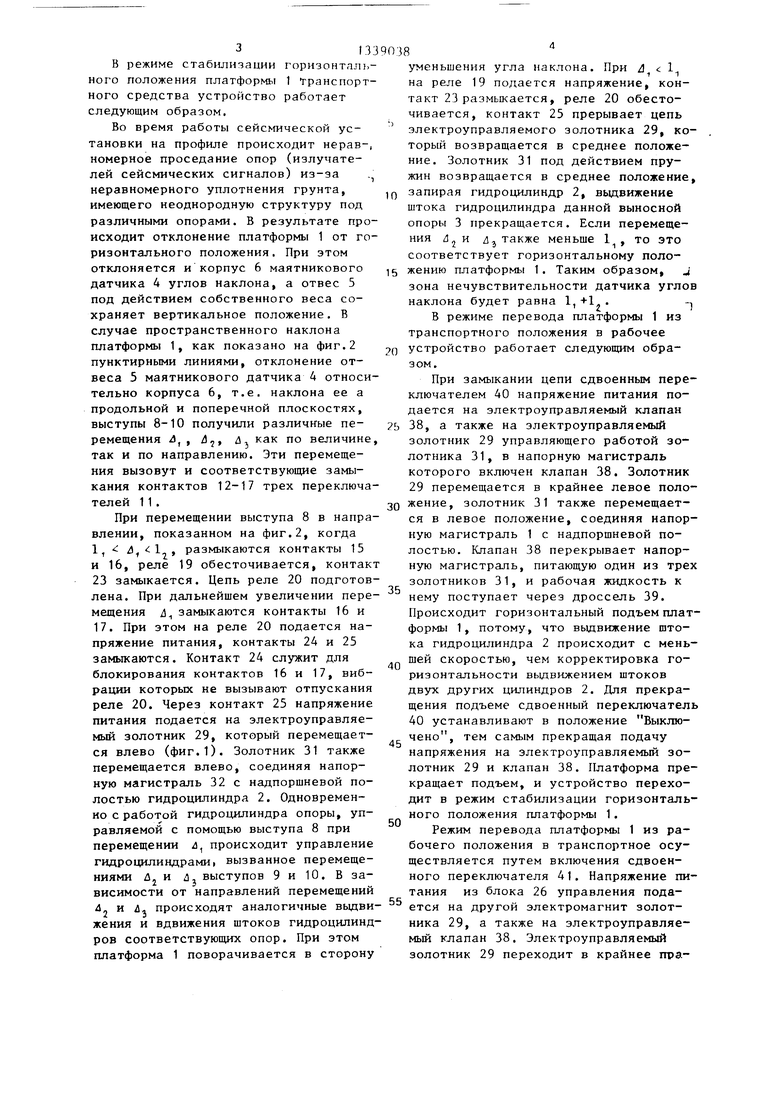
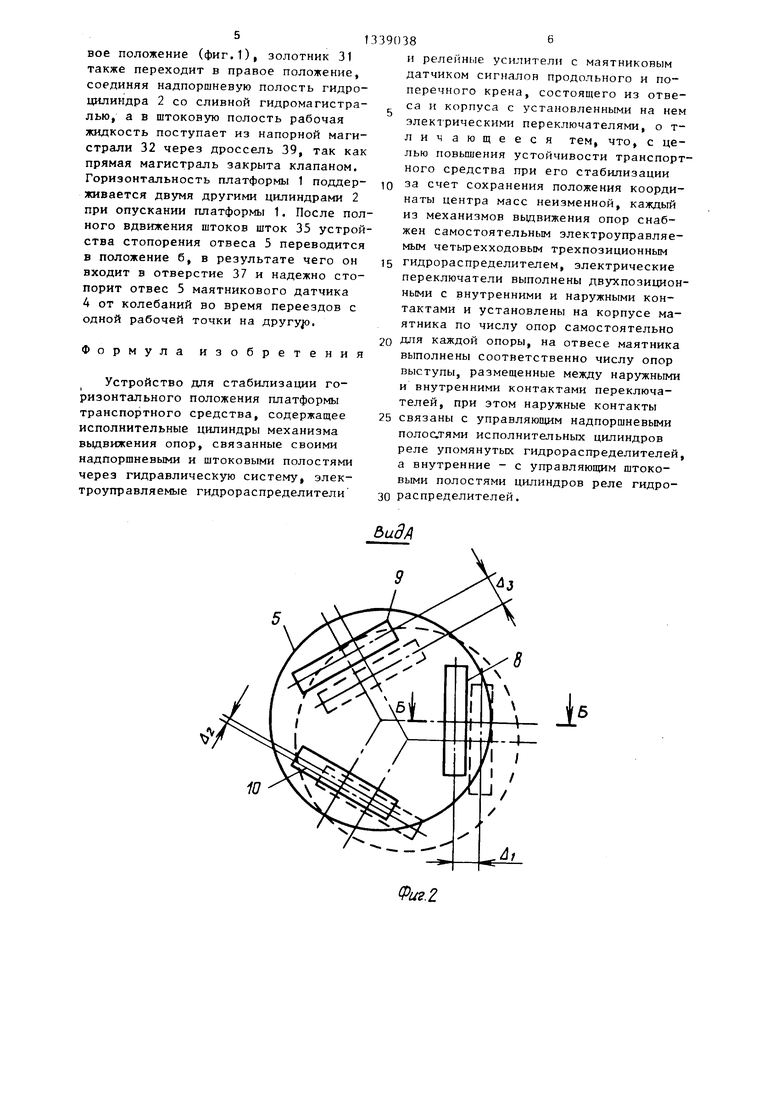
На фиг.1 изображена принципиальная схема предлагаемого устройстваj на фиг.2 - вид А на фиг.1; на фиг.3- разрез Б-Б на фиг.2.
Устройство содержит платформу 1, на которой жестко закреплены корпуса трех гидроцилиндров 2, а их штоки соединены с выносными опорами 3, на которых платформа вывешивается в го- риэонтальном положении при сейсми- ческих исследованиях установки. На платформе 1 гакже закреплен маятниковый датчик 4 сигналов продольного и поперечного крена. Отвес 5 маятникового датчика 4 крепится к корпусу 6 с помощью карданного шарнира 7. На отвесе 5 выполнены выступы 8-10. На корпусе 6 установлены три переключа
теля 11, имеющих по шесть контактных
пластин 12-17. Каждый из переключателей 1 1 соединен с релейным усилителем 18, состоящим из реле 19-22. При этом реле 19 управляет контактами 23, реле 20 - контактами 24 и 25, реле 21 - контактами 26 и 27, а реле 22 - контактами 28. Релейный усилитель 18 соединен с электроуправляемым золотником 29 гидрорлспределителя 30, вклюШ
ми переключателями 11, закрепаенными на корпусе маятникового датчика 6, На отвесе 5 выполнены выступы 8. Гидро- распреде1П1тели 30 снабжены электро- управляемыми золотниками 29 и связаны с исполнительными гидроцилиндрами 2 и релейными усилителями 18. В напорной гидромагистрали одного из исполнительных гидроцилиндров установлен электроуправляемый клапан 38, параллельно ему - дроссель 39. 3 ил.
0
5
0
5
5
0
5
чающим в себя также золотник 31 управления гидроцилиндром 2. Рабочая жидкость к золотнику 31 управления подается по напорной гидромагистрали 31 и отводится по сливной гидромагистрали 33. Для предотвращения колебания отвеса 5 при транспортных переездах на корпусе 6 установлена втулка 34 со штоком 35. Шток 35 заканчивается конусом 36. Под шток 35 на отвесе 5 выполнено отверстие 37. Шток 35 может находиться в двух фиксированных положениях а и б, соответствующих положению расстопорено и застопорено.
Для перевода платформы 1 из транспортного положения в рабочее и наоборот в напорной магистрали одного из золотников 31 установлен электроуправляемый клапан 38 и параллельно ему дроссель 39. Кроме того, устройство снабжено сдвоенными переключателями: 40 - включения режима перевода платформы 1 из транспортного положения в рабочее, 41 - включения режима перевода платформы 1 из рабочего положения в транспортное. Эти сдвоенные переключатели 40 и 41 соединены с электроуправлемым золотником 29 и электроуправляемым клапаном 38.
Работа устройства осуществляется в следующих режимах: стабилизации горизонтальности платформы 1 транспортного средства во время работы источника сейсмических колебаний, перевода платформы из транспортного положения в рабочее, перевода платформы 1 из {рабочего положения в транспортное.
В режиме стабилизации горизонтального положения платформы 1 транспортного средства устройство работает следующим образом.
Во время работы сейсмической установки на профиле происходит нерав-, номерное проседание опор (излучателей сейсмических сигналов) из-за . неравномерного уплотнения грунта, имеющего неоднородную структуру под различными опорами. В результате происходит отклонение платформы 1 от горизонтального положения. При этом отклоняется и корпус 6 маятникового датчика 4 углов наклона, а отвес 5 под действием собственного веса сохраняет вертикальное положение. В случае пространственного наклона платформы 1, как показано на фиг.2 пунктирными линиями, отклонение отвеса 5 маятникового датчика 4 относительно корпуса 6, т.е. наклона ее а продольной и поперечной плоскостях, выступы 8-10 получили различные перемещения 4,, 4,, й как по величине так и по направлению. Эти перемещения вызовут и соответствующие замыкания контактов 12-17 трех переключателей 1 1 .
При перемещении выступа 8 в направлении, показанном на фиг.2, когда 1, , размыкаются контакты 15 и 16, реле 19 обесточивается, контак 23 замыкается. Цепь реле 20 подготовлена. При дальнейшем увеличении перемещения 1 замыкаются контакты 16 и 17. При этом на реле 20 подается напряжение питания, контакты 24 и 25 замыкаются. Контакт 24 служит для блокирования контактов 16 и 17, вибрации которых не вызывают отпускания реле 20. Через контакт 25 напряжение питания подается на электроуправляе- мый золотник 29, который перемещается влево (фиг.1). Золотник 31 также перемещается влево, соединяя напорную магистраль 32 с надпоршневой полостью гидроцилиндра 2. Одновременно с работой гидроцилиндра опоры, управляемой с помощью выступа 8 при перемещении 4, происходит управление гидроцилиндрами, вызванное перемещениями Л и
d выступов 9 и 10. В зависимости от направлений перемещений 4 и и, происходят аналогичные выдви женил и вдвижения штоков гидроцилиндров соответствующих опор. При этом платформа 1 поворачивается в сторону
уменьшения угла наклона. При J 1 на реле 19 подается напряжение, контакт 23 размыкается, реле 20 обесточивается, контакт 25 прерывает цепь электроуправляемого золотника 29, который возвращается в среднее положение. Золотник 31 под действием пружин возвращается в среднее положение, запирая гидроцилиндр 2, выдвижение штока гидроцилиндра данной выносной опорьЕ 3 прекращается. Если перемещения /1J и
л также меньше 1 , то это
35
соответствует горизонтальному поло15 жению платформы 1. Таким образом, J зона нечувствительности датчика углов наклона будет равна 1, +1 . В режиме перевода платформы 1 из транспортного положения в рабочее
20 устройство работает следующим образом.
При замыкании цепи сдвоенным переключателем 40 напряжение питания подается на электроуправляемый клапан
Ь 38, а также на электроуправляемый золотник 29 управляющего работой золотника 31, в напорную магистраль которого включен клапан 38. Золотник 29 перемещается в крайнее левое поло3Q жение, золотник 31 также перемещается в левое положение, соединяя напорную магистраль 1 с надпоршневой полостью. Клапан 38 перекрывает напорную магистраль, питающую один из трех золотников 31, и рабочая жидкость к нему поступает через дроссель 39. Происходит горизонтальный подъем платформы 1, потому, что выдвижение штока гидроцилиндра 2 происходит с меньшей скоростью, чем корректировка горизонтальности выдвижением штоков двух других цилиндров 2. Для прекращения подъеме сдвоенный переключатель 40 устанавливают в положение Выключено, тем самым прекращая подачу напряжения на электроуправляе1 1Й золотник 29 и клапан 38. Платформа прекращает подъем, и устройство переходит в режим стабилизации горизонтального положения платформы 1.
Режим перевода платформы 1 из рабочего положения в транспортное осуществляется путем включения сдвоенного переключателя 41. Напряжение питания из блока 26 управления подается на другой электромагнит золотника 29, а также на электроуправляемый клапан 38. Электроуправляемый золотник 29 переходит в крайнее пра40
50
55
51
вое положение (фиг.1), золотник 31 также переходит в правое положение, соединяя надпоршневую полость гидроцилиндра 2 со сливной гидромагистралью, а в штоковую полость рабочая жидкость поступает из напорной магистрали 32 через дроссель 39, так как прямая магистраль закрыта клапаном. Горизонтальность платформы 1 поддерживается двумя другими цилиндрами 2 при опускании платформы 1. После полного вдвижения штоков шток 35 устройства стопорения отвеса 5 переводится в положение б, в результате чего он входит в отверстие 37 и надежно стопорит отвес 5 маятникового датчика 4 от колебаний во время переездов с одной рабочей точки на другу о.
Формула изобретения
Устройство для стабилизации горизонтального положения платформы транспортного средства, содержащее исполнительные цилиндры механизма выдвижения опор, связанные своими надпоршневыми и штоковыми полостями через гидравлическую систему, элек- троуправляемые гидрораспределители
390386
и релейные усилители с маятниковым датчиком сигналов продольного и поперечного крена, состоящего из отвеса и корпуса с установленными на нем электрическими переключателями, о т- личающееся тем, что, с целью повышения устойчивости транспортного средства при его стабилизации
1Q за счет сохранения положения координаты центра масс неизменной, каждый из механизмов выдвижения опор снабжен самостоятельньм злектроуправляе- мым четырехходовым трехпозиционным
15 гидрораспределителем, электрические переключатели выполнены двухпозицион- ными с внутренними и наружными контактами и установлены на корпусе маятника по числу опор самостоятельно
20 для каждой опоры, на отвесе маятника выполнены соответственно числу опор пыступы, размещенные между наружными и внутренними контактами переключателей, при этом наружные контакты
25 связаны с управляющим надпоршневыми ПОЛОС.ТЯМИ исполнительных цилиндров реле упомянутых гидрораспределителей, а внутренние - с управляющим штоковыми полостями цилиндров реле гидро30 распределителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации заданного положения платформы транспортного средства | 1990 |
|
SU1743916A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1985 |
|
SU1379136A2 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1981 |
|
SU1009817A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1982 |
|
SU1066844A1 |
| Источник сейсмических колебаний | 1989 |
|
SU1714548A1 |
| Система управления гидравлическим гайковертом | 1989 |
|
SU1684017A1 |
| Система управления выносными опорами платформы | 1982 |
|
SU1039863A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2018 |
|
RU2709270C1 |
| Стенд для испытания автогрейдера | 1989 |
|
SU1647336A1 |
| Устройство для управления выносными опорами грузовой платформы | 1986 |
|
SU1423493A1 |
Изобретение относится к транспортному машиностроению, может быть использовано в других областях, где необходимо обеспечить горизонтальное положение платформы, и обеспечивает повышение устойчивости транспортного 6 ш (Л оо со о со 00
Q
.J
б1б
12 l 17 .к /|/
Редактор В.Данко
Составитель Ю.Шурупов
Техред Л.Олийнык Корректор и.Муска
Заказ 4176/13 Тираж 598Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
(Риг.д
| 0 |
|
SU159345A1 | |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
