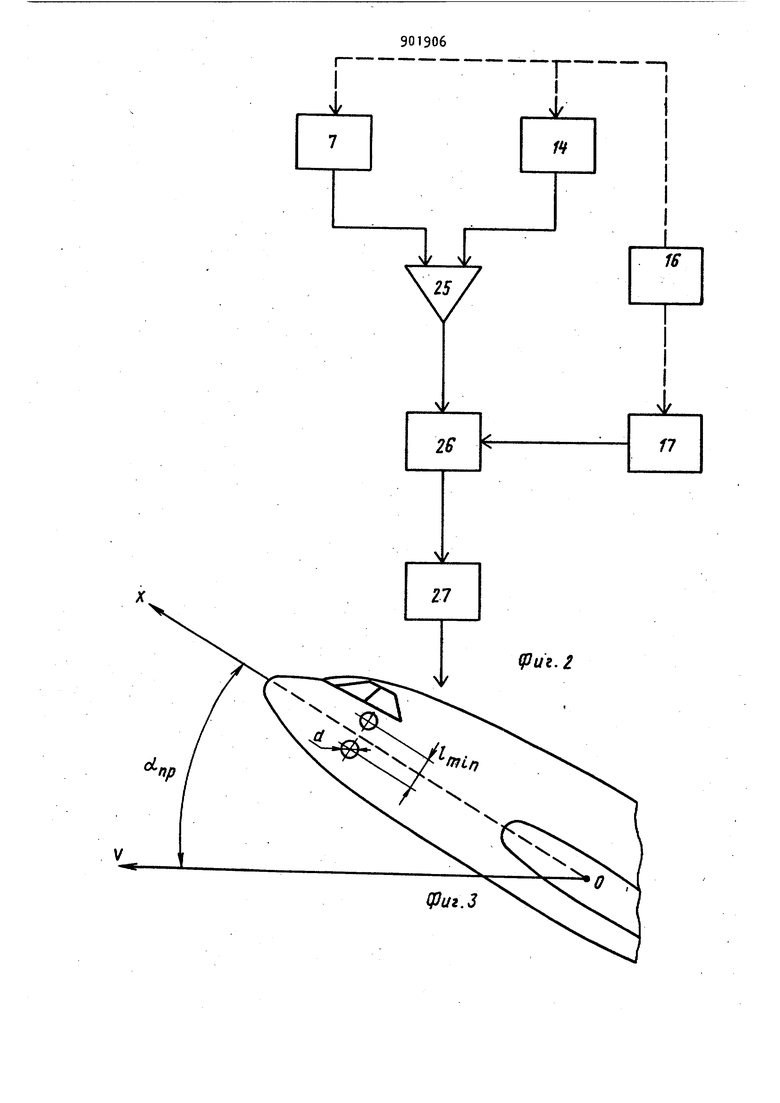
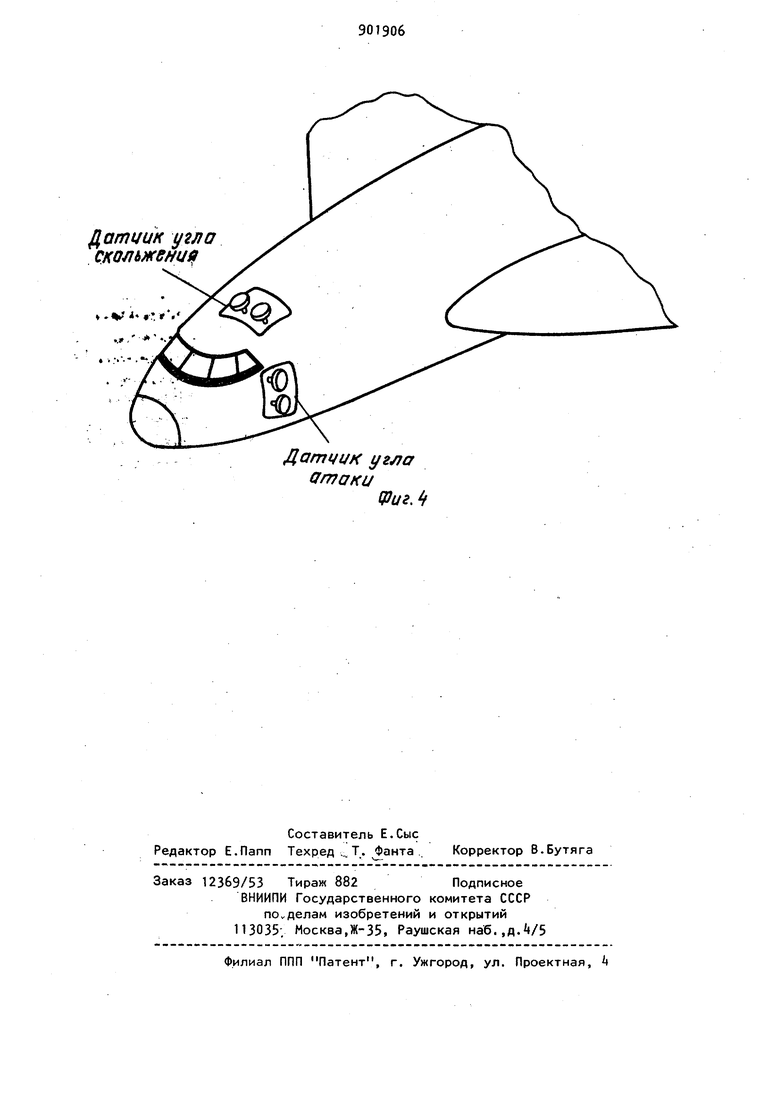
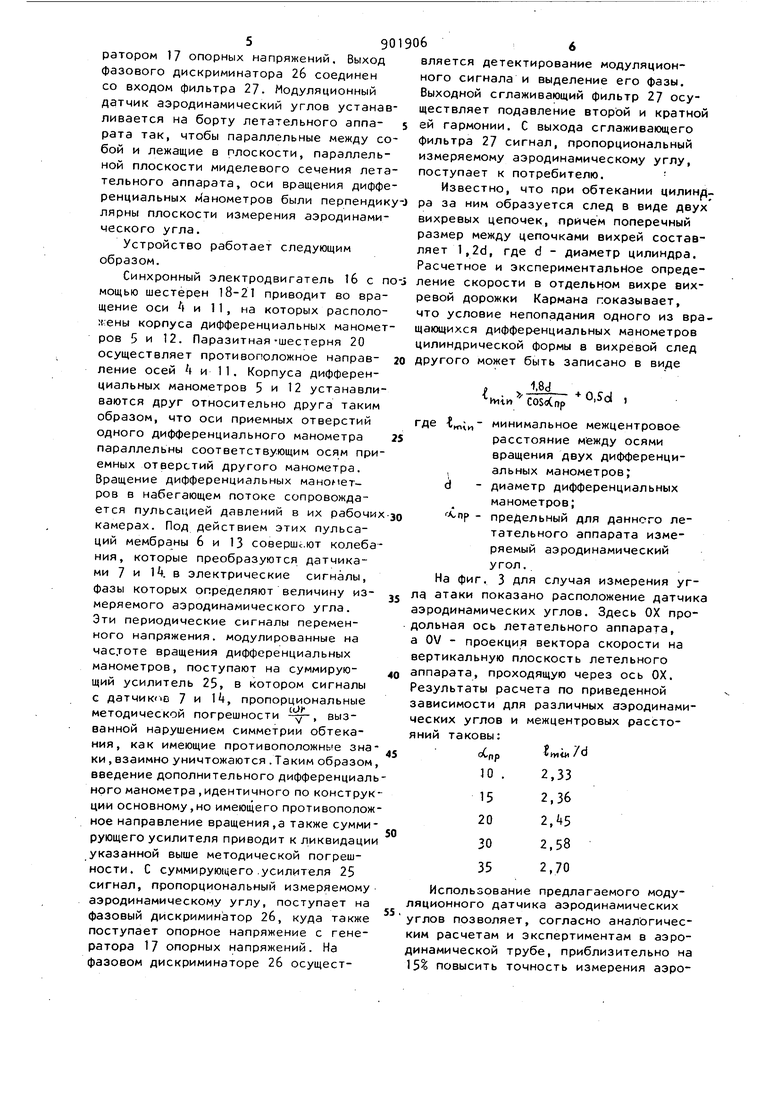
90190 рая пропорциональна отношению где W - угловая скорость вращения цилиндра; г - радиус цилиндра; V скорость невозмущенного потока. Описанное выше нарушение симметрии потока приводит к дополнительной методической погрешности измерения аэродинамического угла, пропорциональной -г- , Таким образом, измеряемыйю аэродинамический угол может быть определен из следующего соотношения л К(ДЧ)Кг-, где at - измеряемый аэродинамический угол коэффициенты пропорциональности; - разность фаз опорного напря жения и модулированного си| нала пропорциональная измеря мому аэродинамическому углу; методическая погрешность. Из рассмотрения этой формулы видн9 что измерение аэродинамического угла сопровождается методической погрешнос тью, зависящей от величины скорости набегающего потока. При этом следует заметить, что для современных летательных аппаратов характерен широкий диапазон скоростей полета (от единиц километров в час до скоростей, в нес колько раз превышающих скорость звук Цель изобретения повышение точности измерения аэродинамических углов модуляционным датчиком путем усо вершенствований известного устройств Указанная цель достигается тем, что модуляционный датчик аэродинамических углов снабжен суммирующим усилителем и дополнительным идентичным первому дифференциальным маномет ром, равномерно вращающимся с той же скоростью и имеющим противоположное направление врещения, причем оси вращения обоих дифференциальных ма нометров параллельны между йобой, а расстояние между ними определяется из соотношения . tad л CJ Hiw CoSeCnp где d - диаметр циклов дифференциал ных манометров} сСпр- предельный для данного летательного аппарата измеряемый аэродинамический уго при этом дифференциальные манометры соединены со входами суммирующего . ; 4 усилителя, выход которого подключен к измерительной схеме датчика. На фиг. 1 изображен измеритель, продольный разрез -на фиг. 2 представлена схема электропреобразовательной части измерителя на фиг. 3 показано расположение измерителя на борту летательного аппарата; на фиг. k дан пример размещения двух измерителей для определения углов атаки и скольжения на борту детательного аппарата. Модуляционный датчик аэродинамических углов состоит из неподвижного корпуса 1, в нижней обойме которого с помощью подшипников 2 и 3 установлена полая ось,, на которой закреплен корпус дифференциального манометра 5 с двумя отверстиями, каждое из которых сообщается с одной из камер дифференциального манометра, образованными мембраной 6. Кроме того в корпусе дифференциального манометра 5 размещен датчик 7, преобразующий механические перемещения мембраны 6 в электрический сигнал. На другом конце полой оси Ц размещены контактные кольца 8 токосъемного устройства, служа- . щие для съема сигнала с датчика В верхней обойме неподвижного корпуса 1 с помощью подшипников 8-10 установлена полая ось 11, на которой закреплен корпус дополнительного дифференциального манометра 12 с мембраной 13 и датчиком 1 ее механического перемещения в электрический сигнал. Конструкции обоих дифференциальных манометров совершенно идентичны. На другом конце полой оси 11 также расположены контактные кольца 15 токосъемного устройства. В центральной обойме Непод вижного корпуса 1 закреплен синхронный электродвигатель 16, конструктивно объединенный с генератором 17 опорных напряжений. Передача вращающего момента от электродвигателя 1б к дифференциальным манометрам осуществляется посредством шестерен 18-21. Паразитная шестерня 20 с помощью оси 22 и подшипников 23 и 2Ц установлена в неподвижном корпусе 1. Электропреобразовательная часть датчика аэродинамических углов содержит датчики 7 и 1 механических перемещений мембран дифференциальных манометров в электрический сигнал которые подключены ко входу суммирующего усилителя 25, выход котррого подключен ко входу фазового дискриминатора 26. Кроме того, фазовый дискриминатор 26 электрически связан с геиератором 17 опорных напряжений. Выход фазового дискриминатора 26 соединен со входом фильтра 27. Модуляционный датчик аэродинамический углов устанавливается на борту летательного аппарата так, чтобы параллельные между собой и лежащие а плоскости, параллельной плоскости миделевого сечения летательного аппарата, оси вращения дифференциальных /Манометров были перпендику
лярны плоскости измерения аэродинамического угла.
Устройство работает следующим образом. Синхронный электродвигатель 16 с МОЩЬЮ шестерен 18-21 приводит во вра щение оси 4 и 11, на которых располо жены корпуса дифференциальных маноме ров 5 и 12. Паразитная-шестерня 20 осуществляет противоположное направление осей f и 1 1 . Корпуса дифференциальных манометров 5 и 12 устанавли ваются друг относительно друга таким образом, что оси приемных отверстий одного дифференциального манометра параллельны соответствующим осям при емных отверстий другого манометра. Вращение дифференциальных манометров в набегающем потоке сопровождается пульсацией давлений в их рабочих камерах. Под действием этих пульсаций мембраны 6 и 13 совершс.ют колеба ния, которые преобразуются датчиками 7 и 1. в электрические сигналы, фазы которых определяют величину измеряемого аэродинамического угла. Эти периодические сигналы переменного напряжения, модулированные на частоте вращения дифференциальных манометров, поступают на суммирующий усилитель 25, в котором сигналы с датчиков 7 и 14, пропорциональные методической погрешности -у-, вызванной нарушением симметрии обтекания, как имеющие противоположные знаки , взаимно уничтожаются .Таким образом введение дополнительного дифференциаль ного манометра,идентичного по конструк ции основному,но имеющего противополож ное направление вращения,а также сумми рующего усилителя приводит к ликвидации указанной выше методической погрешности. С суммирующего.усилителя 25 сигнал, пропорциональный измеряемому аэродинамическому углу, поступает на фазовый дискриминатор 2б, куда также поступает опорное напряжение с генератора 17 опорных напряжений. На фазовом дискриминаторе 26 осуществихревых цепочек, причем поперечный размер между цепочками вихрей составляет l,2d, где d - диаметр цилиндра. Расчетное и экспериментальное опредевляется детектирование модуляционного сигнала и выделение его фазы. Выходной сглаживающий фильтр 2/ осуществляет подавление второй и кратной ей гармонии. С выхода сглаживающего фильтра 27 сигнал, пропорциональный измеряемому аэродинамическому углу, поступает к потребителю. Известно, что при обтекании цилинрра за ним образуется след в виде двух ление скорости в отдельном вихре вихревой дорожки Кармана показывает, что условие непопадания одного из вращающихся дифференциальных манометров цилиндрической формы в вихревой след другого может быть записано в виде / :Ш- COSoCnp где {„ минимальное межцентровое расстояние между осями вращения двух дифференциальных манометров; диаметр дифференциальных манометров; предельный для данного летательного аппарата измеряемый аэродинамический угол. 3 для случая измерения угНа фиг. ла атаки показано расположение датчика аэродинамических углов. Здесь ОХ продольная ось летательного аппарата, а OV - проекция вектора скорости на вертикальную плоскость летельного аппарата, проходящую через ось ОХ. Результаты расчета по приведенной зависимости для различных аэродинамических углов и межцентровых расстояний таковы: Использование предлагаемого модуляционного датчика аэродинамических углов позволяет, согласно аналогическим расчетам и экспертиментам в аэродинамической трубе, приблизительно на 15% повысить точность измерения аэродинамических углов, что позволяет расширить область применения этих датчиков,
Формула изобретения
Модуляционный датчик аэродинамических углов по авт. св. № 651253, о тличающийся тем, что, с цельюо повышения точности измерений, он снабжен суммирующим усилителем и дополнительным дифференциальным манометром, установленным с возможностью вращения с постоянной скоростью, равной по ве- 15 личине скорости вращения основного дифференциального манометра, но противоположной по направлению, причем оси вращения обоих дифференциальных
-mw
(puz.f
9019068
манометров параллельны между собой, расстояние между ними определяется из соотношения
1.8 d
O.Sd
-ыги
где d диаметр цилиндров дифференциальных манометров; сСпр- предельный для данного летательного аппарата измеряемый аэродинамический угол, при этом дифференциальные манометры соединены со входами суммирующего усилителя, выход которого подключен к измерительной схеме датчика.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 651253, кл.б 01 Р 5/00,1975.
5/5
... « Датчик у wo скольжение Датци/ угла fffTJOKU Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуляционный датчик аэродинамических углов | 1977 |
|
SU651253A1 |
| Модуляционный датчик аэродинамических углов | 1981 |
|
SU980005A2 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ ГАЗОВОГО ПОТОКА | 1992 |
|
RU2041463C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1979 |
|
SU801712A1 |
| Устройство для измерения направления двухмерного парового потока | 1980 |
|
SU922640A1 |
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННЫЙ СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537384C1 |
| Кинематический датчик аэродинамического угла и истинной воздушной скорости | 2019 |
|
RU2737518C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014563C1 |
| БОРТОВОЙ ИЗМЕРИТЕЛЬ РАЗНОСТИ ДАЛЬНОСТЕЙ ДЛЯ СИСТЕМЫ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018869C1 |