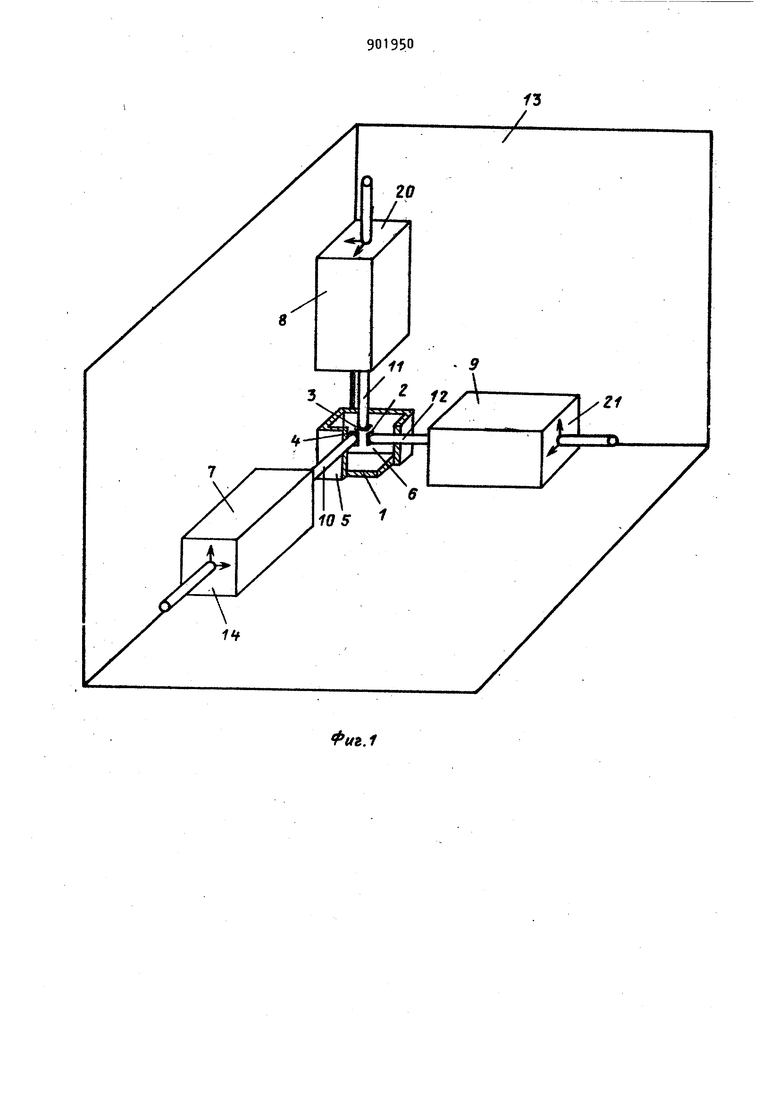
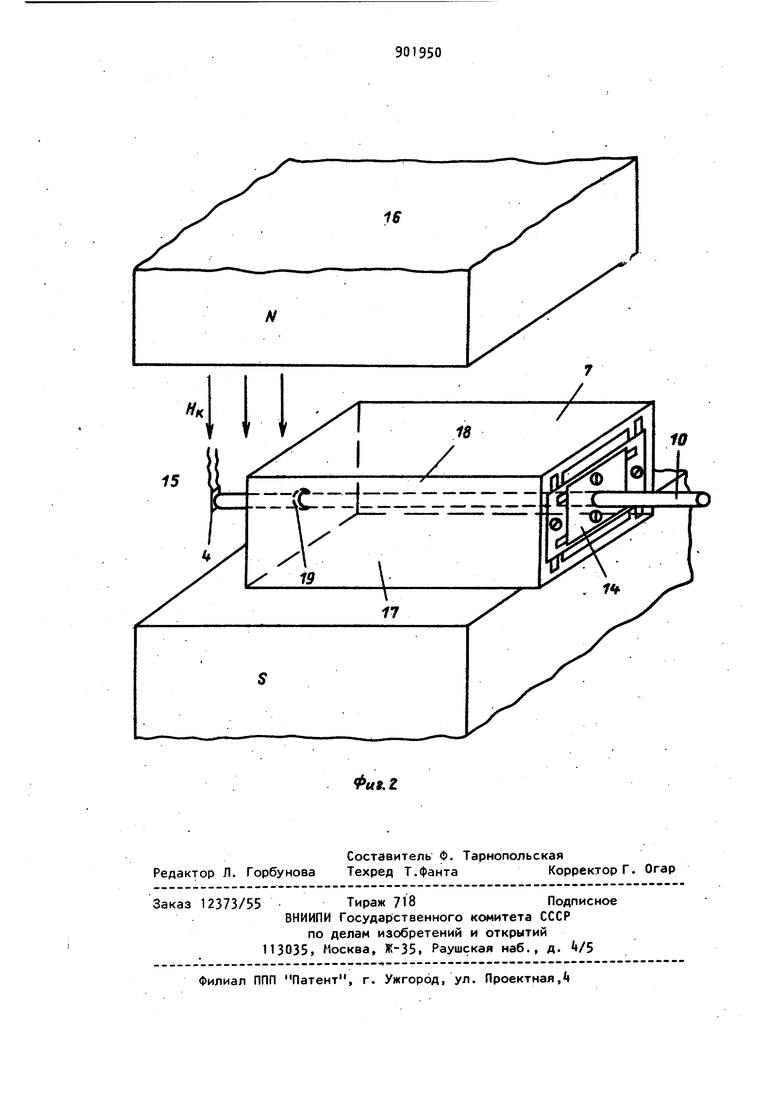
ствительных элементов датчика в однородном магнитном поле относительно опорных фигур, выставляют магнитные плоскости каждого магниточувствитель ного элемента датчика с помощью блок ориентации ортогонально его пары пло костей , устанавливают и фиксируют магниточувствительные элементы датчика вместе с блоками ориентации в опорной фигуре относительно ее соответствующих пар плоскостей, формируют тело датчика с последующим удалением блоков ориентации от датчика. Устройство для осуществления способа, содержащее электромагнит и опорную фигуру, снабжено тремя блоками ориентации, расположенными внут ри опорной фигуры, каждый из которых выполнен в виде параллелепипеда со штоком, на котором закреплен магниточувствительный элемент датчика, и механизмом для углового перемещения по двум взаимно перпендикулярным направлениям, а опорная фигура выполнена в виде пространственного угла, образованного тремя взаимно ортогональными пересекающимися плоскостями На фиг. 1 изображена сборка магни точувствительных элементов в трехкомпонентный датчик магнитного поля на фиг. 2 - момент установки магниточувствитепьного элемента датчика по углу максимальной чувствительност Способ осуществляется следующим образом. Берется плоскость 1 (фиг.1) и от носительно нее выставляются по взаимно ортогональным направлениям ма ниточувствительные элементы 2,3 и , после чего устанавливается сборн корпус 5 датчика магнитного поля (состоящий из двух частей) и формируется тело датчика 6 магнитного по ля , заполняя корпус 5 композицией холодного безусадочного отверждения например на основе эпоксидных смол. После формирования пластина 1 и маг ниточувствительные элементы 2, 3 и t оказываются связанными в одно целое - датчик 6 магнитного поля, затем снимают сборный корпус 5 и отде ляют блоки 7, 8 и 9 ориентации от датчика 6 магнитного поля, для чего обрезают штоки .ГО, 11 и 12 в местах входа в датчик. Указанные операции осуществляются внутри опорной фигуры 13, образованной тремя взаимно ортогональными плоскостями. Предварительно магниточувствительные элементы 2, 3 и выставляются в либровочном магнитном поле Н носительно базовых плоскостей раллелепипедов блоков 7,8 и 9- Опорный параллелепипед блока 7, имеющий шток 10 с механизмом l перемещения по двум координатам помещается в зазор 15 калибровочного электромагнита 16, имеющего магнитное поле Нц с высокой степенью однородности. На конец ШТока 10 наклеивается магниточувствительный элемент k, по сигналам, снимаемым с магниточувствительного элемента k, его устанавливают с помощью механизма Н перемещения по одной координате, выставляя его от- носительно плоскости 17 параллелепипеда 7, после чего поворачивают параллелепипед 7 на плоскость 18 и с помощью механизма 1 выставляют элемент k по другой координате. Таким образом, магниточувствительный элемент 4 может быть выставлен с большой степенью точности по калибровочному электромагнитному полю Н относительно плоскостей 17 и 18 параллелепипеда блока 7. Точ- , ность установки и размеры датчика магнитного поля при этом не связаны с базовыми размерами опорного тела, которые могут быть, в принципе, очень большими (несколько метров) при размерах датчика, ограниченных размерами применяемых магниточувствительных элементов 2, 3 и . Для свободного перемещения штока 10 к жесткой его фиксации в параллелепипеде блока 7 установлена втулка 19, например, из, резиноподобного материала. Аналогично устанавливаются относительно параллелепипедов блоков В и 9 магниточувствительные элементы 2 и 3, после чего все три фигуры переносятся в пустотелый угол опорной фигуры 13 и прижимаются на необходимом расстоянии к его граням, после чего ведется процесс изготовления датчика магнитного поля. В предлагаемом способе отсутствует связь между размерами изготавливаемого датчика и базовыми размерами опорных фигур. Расстояние между Датчиками определяется лишь их размерами. Устройство для изготовления датчиков магнитного поля состоит из опорной фигуры 13 и трех блоков ориентации 7, 8 и 9 в виде параллелепипедов, имеющих штоки 10,11 и 12 с механизмами 1A, 20 и 21 перемещения по двум KoopflHHataM (). Настоящий способ изготовления трехкомпонентного датчика магнитног поля и устройство для его осуществл ния упрощают процесс изготовления датчиков, особенно в случае серийно го их производства, обеспечивают по лучение датчиков магнитного поля, имеющих наименьшие габариты и сохраняющие, по сравнению с известными способами изготовления, характеристики измерения составляющих магнитного поля по осям. Формула изобретения 1. Способ изготовления трехкомпонентного датчика магнитного поля, включающий ориентацию магниточувствительных элементов датчика в одн родном магнитном поле относительно опорных фигур, отличающийс я тем, что, с целью упрсще ия способа при повышении точности датч ка, выставляют магнитные плоскости каждого магниточувствительного элемента датчика с помощью блока ориен тации ортогонально его пары плоскос тей, устанавливают и фиксируют маг06ниточувствительные элементы датчика вместе с блоками ориентации в опорной фигуре относительно ее соответствующих пар плоскостей, формируют тело датчика с последующим удалением блоков ориентации от датчика. 2. Устройство для осуществления способа по п.1, содержащее электромагнит и опорную фигуру, о т л ичающееся тем, что-оно снабжё- но тремя блоками ориентации, расположенными внутри опорной фигуры,каждый из которых выполнен в виде параллелепипеда со штоком, на котором закреплен магниточувствительньЛ элемент датчика, и механизмом для углового перемещения по двум взаимно перпендикулярным направлениям, а опорная фигура выполнена в виде пространственного угла, образованного тремя взаимно ортогональными пересекающикмся плоскостями. Источники информации, принятые во внимание при экспертизе 1.Бетко Ю. и др. Магнитное поле 2-метровой жидководородной пузырьковой камеры СКАТ. ОИЯИ 1-6769,Дубна, 1972, 2.Патент Японии № 9-25912, кл. G 01 R 33/02, 197.
fu.l