(54) КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ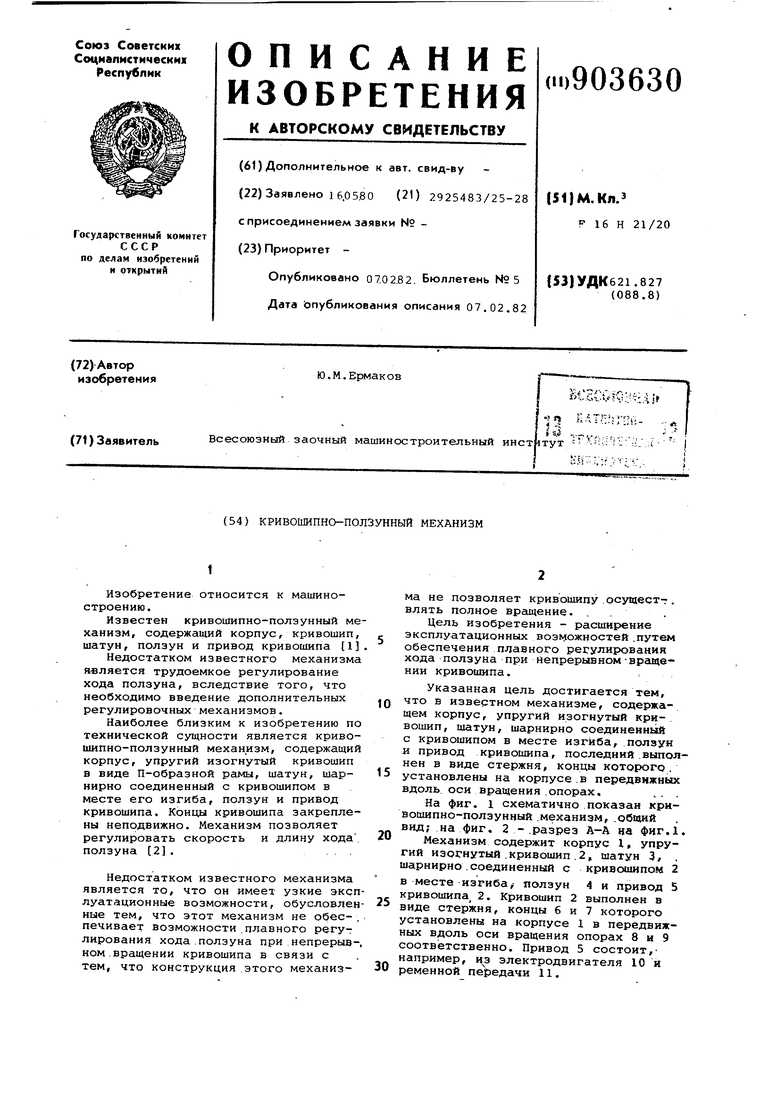
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| Регулируемый кривошипно-ползунный механизм | 1982 |
|
SU1073516A1 |
| Стенд для испытаний зубьев зубчатых колес при динамических нагрузках | 1980 |
|
SU1010486A1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1997 |
|
RU2127385C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ НА МАЛОЦИКЛОВУЮ УСТАЛОСТЬ ПРИ ЧИСТОМ ИЗГИБЕ | 2004 |
|
RU2262682C1 |
| Кривошипно-ползунный механизм | 2017 |
|
RU2655124C1 |
| Кривошипно-шатунный механизм | 1980 |
|
SU998807A1 |
| Роторный двигатель с внешним подводом теплоты | 2022 |
|
RU2814331C1 |
| Привод валков пилигримового стана | 1966 |
|
SU458352A1 |
1
Изобретение относится к машиностроению.
Известен кривошипно-ползунный механизм, содержащий корпус, кривошип, шатун, ползун и привод кривошипа 1.
Недостатком известного механизма является трудоемкое регулирование хода ползуна, вследствие того, что необходимо введение дополнительных регулировочных механизмов.
Наиболее близким к изобретению по технической сущности является кривошипно-ползунный механизм, содержащий корпус, упругий изогнутый кривошип в виде П-образной рамы, шатун, шарнирно соединенный с кривошипом в месте его изгиба, ползун и привод кривошипа. Концы кривошипа закреплены неподвижно. Механизм позволяет регулировать скорость и длину хода , ползуна 2....
Недостатком известного механизма является то, что он имеет узкие эксплуатационные возможности, обусловленные тем, что этот механизм не обес- , печивает возможности.плавного регут лирования хода .ползуна при непрерыв-, ном.вращении кривошипа в связи с тем, что конструкция этого механизма не позволяет кривошипу.осувдестт. влять полное вращение. , .
Цель изобретения - расширение эксплуатационных возможностей.путем обеспечения nJjaBHoro регулирования хода ползуна при непрерывном-вращении кривошипа.
Указанная цель достигается тем, что в известном механизме, содержащем корпус, упругий изогнутый крн-. вошип, шатун, шарнирно соединенный с кривошипом в месте изгиба, ползун к привод кривошипа, последний .выполнен в виде стержня, концы которого. установлены на корпусе.в передвижных вдоль, оси вращения.опорах, ,. .
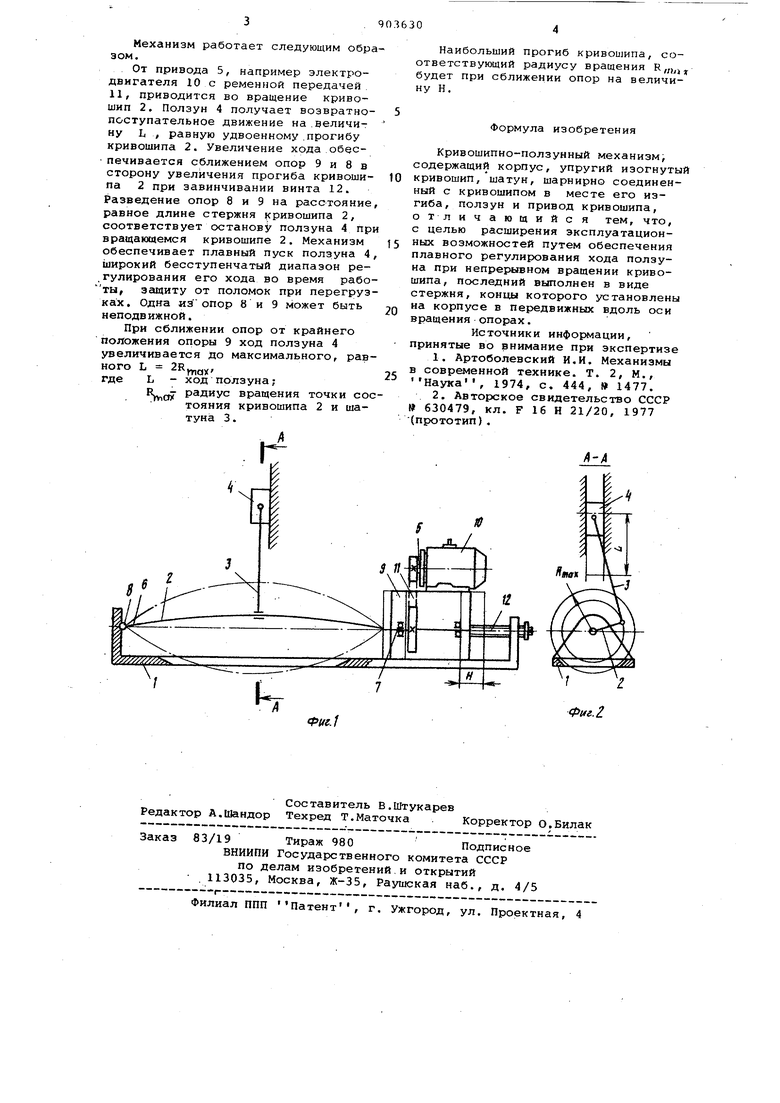
На фиг. 1 схематично показан крнвошипно-ползунный .механизм, .общий вид; на фиг. 2 - .разрез А-А на фиг.1.
Механизм содержит корпус I, упругий изогнутый.кривошип.2, шатун 3, . шарнирно.соединенный с кривошипом 2
в месте -изгиба,- ползун 4 и привод 5 кривошипа 2. Кривошип 2 выполнен в виде стержня, концы б и 7 которого установлены на корпусе 1 в передвижных вдоль оси вращения опорах 8 и 9 соответственно. Привод 5 состоит,например, кз электродвигателя 10 и ременной пеЪедачи 11. Механизм работает следующим обра зом. От привода 5, например электродвигателя 10 с ременной передачей 11, приводится во вращение кривошип 2. Ползун 4 получает возвратнопоступательное движение на .величину 1, , равную удвоенному .прогибу кривошипа 2. Увеличение хода обеспечивается сближением опор 9 и 8 в сторону увеличения прогиба кривошипа 2 при завинчивании винта 12. Разведение опор 8 и 9 на расстояние равное длине стержня | ривошипа 2, соответствует останову ползуна 4 пр враадаюдемся кривошипе 2. Механизм обеспечивает плавный пуск ползуна 4 широкий бесступенчатый диапазон ре.гулирования его хода во время рабо ты, защиту от поломок при перегруз ках. Одна из опор 8 и 9 может быть неподвижной. При сближении опор от крайнего положения опоры 9 ход ползуна 4 увеличивается до максимального, рав ного L 2R где L - ход ползуна; R jjj- радиус вращения точки со тояния кривошипа 2 и шатуна 3. Наибольший прогиб кривошипа, соответствующий радиусу вращения К,,), будет при сближении опор на величину Н. Формула изобретения Кривошипно-ползунный механизм, содержащий корпус, упругий изогнутый кривошип, шатун, шарнирно соединенный с кривошипом в месте его изгиба, ползун и привод кривошипа, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения плавного регулирования хода ползуна при непрерывном вращении кривошипа, последний выполнен в виде стержня, концы которого установлены на корпусе в передвижных вдоль оси вращения опорах. Источники информации, принятые во внимание при экспертизе 1.Артоболевский И.И. Механизмы в современной технике. Т. 2, М., Наука, 1974, с. 444, I 1477. 2.Авторское свидетельство СССР 630479, кл. F 16 Н 21/20, 1977 (прототип).
