(54) МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Моделирующее устройство | 1979 |
|
SU831609A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| Манипулятор | 1982 |
|
SU1068280A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
1
Изобретение относится к машиностроению и может быть использовано при разработке различных робототехнических систем.
Известно моделирующее устройство исполнительного органа робототехнической системы, содержащее пульт управления, блок управления и исполнительный орган, содержащий ряд последовательно смонтированных телескопических звеньев, приводов, информационных датчиков, упругих элементов и механизмов преобразования вращательных движений выходных валов приводов в поступательные движения телескопических звеньев 1.
Недостатком известного устройства является то, что при моделировании колебательных движений исполнительного органа робототехнической системы не учитываются повороты сечений концов его звеньев, .обусловленные их упругостью, что снижает точность определения технических характеристик исполнительного органа.
Цель изобретения - повышение точности определения технических характеристик исполнительного органа с учетом его упругости.
Цель достигается тем, что моделирующее устройство снабжено, по меньшей мере, одной дополнительной механической передачей, а привод хотя бы одного телескопического звена установлен шарнирно на конце предыдущего телескопического звена и кинематически связан с соответствующим механизмом преобразования движения при помощи дополнительной механической пере-г дачи.
Цричем дополнительная механическая пе редача выполнена в виде трособлочной системы с замкнутым гибким элементом.
15
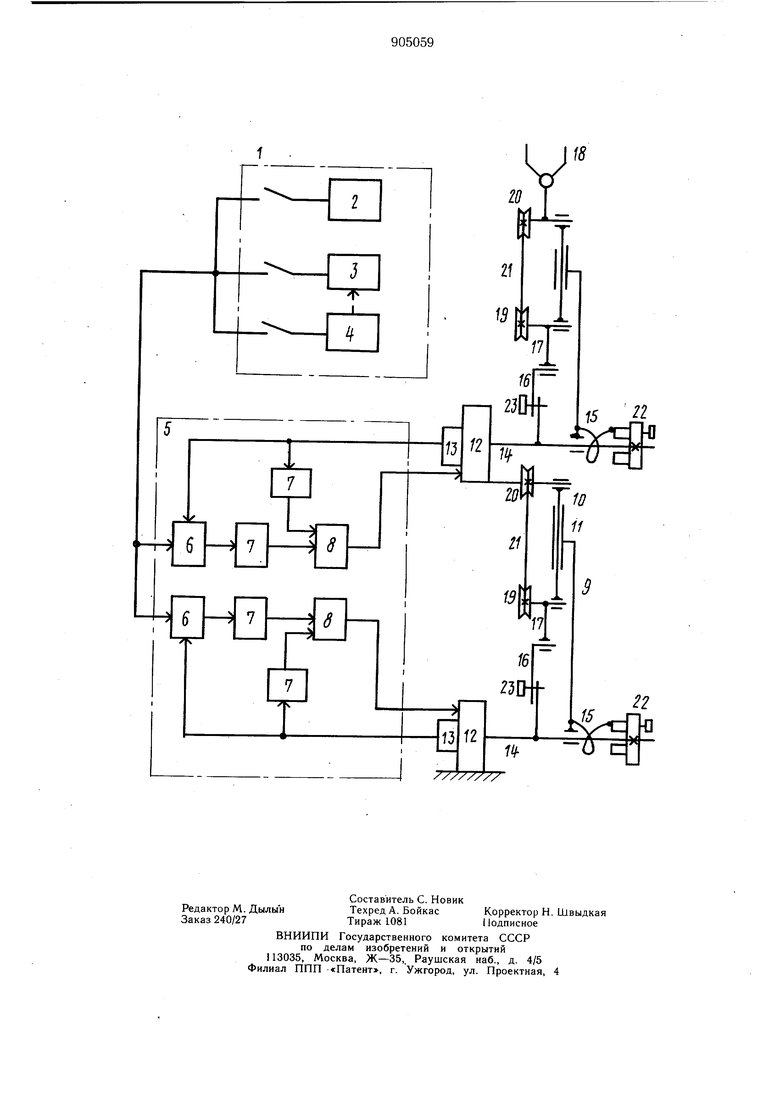
На чертеже изображена схема моделирующего устройства.
Моделирующее устройство содержит пульт управления 1, включающий программное устройство 2, электронно-вычислитель20ную машину 3 и органы управления 4 с контрольно-измерительной аппаратурой, .блок управления приводами 5, включающий элементы сравнения 6, корректирующее устройство 7 и управляющие усилители 8, и исполнительный орган манипулятора, содержащий последовательно смонтированные звенья, выполненные из телескопических секций 9 и 10 с возможностью возвратно-поступательного перемещения секций в направляющих 11, жестко связанных с секциями 9, привода 12, информационные датчики 13. Секции 9 установлены щарнирно на выходных валах 14 приводов 12 и механически связаны с ними через упругие элементы 15, а секции 10 кинематически связаны с выходными валами 14 приводов 12 через механизмы преобразования вращательного движения в поступательное, например через кривошипно-щатунные механизмы, состоящие из кривошипов 16 и шатунов 17. Привод 12 последующего звена и схват 18 установлены щарнирно на секциях 10 соответственно предыдущих звеньев. В шарнирных соединениях секций 10 с схватом 18, приводом 12 и с щ ату ном 17 установлены блоки 19 и 20, соединенные попарно замкнутыми гибкими элементами 21. Упругие элементы
15и кривощипы 16 снабжены регулировочными устройства.ми 22 и 23.
Моделирующее устройство работает следующим образо.м.
При воздействии управляющего сигнала, сформированного в пульте управления 1 и блоком- управления приводами 5, выходной вал 14 привода 12 поворачивается по требуемому закону. В переходных режимах закон поворота телескопически соединенных секций 9 и 10 отличается от закона поворота выходного вала 14 из-за деформации упругого элемента 15. Поскольку кривощип
16жестко соединен с выходным валом 14, то и его угловое положение относительно оси вращения также не совпадает с угловым положением секции 9 в переходных режимах, что вызывает одновременно с поворотом и продольные перемещения секции 10 в направляющих П. Одновременно блоки 19, жестко соединенные с щатунами 17, поворачиваются относительно секций 10, что в свою очередь вызывает поворот привода последующего звена и схвата, с которым жестко соединены блоки 20. Таким образом, в переходных режимах звенья и схват исполнительного органа моделирующего устройства совершают колебательные повороты с одновременным периодическим йз.менением собственной длины. Дополнительный
поворот привода последующего звена и схвата имитируют повороты сечений концов звеньев проектируемого манипулятора при их изгибных деформациях. Это в большей степени соответствует движениям концов упругих звеньев исполнительного органа проектируемого манипулятора. Посредством регулирующих устройств 22 и 23 изменяют соответственно жесткость упругого элемента 15 и длину продольного хода секций 10
с целью задания требуемых динамических и статических характеристик исполнительного органа моделирующего устройства.
Использование предложенной моделирующей установки повышает точность результатов экспериментальных исследований на
стадии проектирования манипуляционных робототехнических систем, за счет чего повыщается их качество, а также сокращаются сроки создания и отладки головных образцов.
Формула изобретения
содержащее пульт управления, блок управления и исполнительный орган, имеющий ряд последовательно смонтированных телескопических звеньев, приводов, информационных датчиков, упругих элементов и механизмов преобразования вращательных движений выходных валов приводов в цоступательные движения телескопических звеньев, отличающееся тем, что, с целью повыщения точности определения технических характеристик исполнительного органа с учетом его упругости, оно снабжено, по меньщей мере, одной механической передачей, а привод хотя бы одного телескопического звена установлен щарнирно на конце предыдущего телескопического звена и кинематически связан с соответствующим механизмом преобразования движения при помощи упомянутой механической передачи.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2789603/25-08, кл. В 25 J 11/00, 1979.
