(54) МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Моделирующее устройство | 1980 |
|
SU905059A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Манипулятор | 1982 |
|
SU1068280A1 |
| Манипулятор | 1987 |
|
SU1511120A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Задающий орган манипулятора | 1983 |
|
SU1088928A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
I
Изобретение относится к машиностроению, а именно к роботостроению, и предназначено для проведения экспериментальных исследований при создании робототехнических систем различного назначения, в частности манипуляционных.
Известно моделируюш,ее устройство исполнительного органа робототехнической системы, содержащее пульт управления, блок управления, исполнительный орган, имеюш,ий ряд последовательно соединенных звеньев, приводов и информационных датчиков 1 .
Однако конструкция звеньев исполнительного органа известной робототехнической системы не позволяет точно имитировать колебательные перемещения схвата манипулятора проектируемой системы, которые обус;;гЬвлены поперечными и продольными перемещениями концов этих звеньев при их динамической и статической деформациях.
Цель изобретения - повыщение точности определения технических характеристик проектируемых робототехнических систем с учетом упругости их звеньев.
Цель достигается тем, что моделирующее устройство снабжено упругим элементом и
механизмом преобразования вращательного движения в возвратно-поступательное, хотя бы одно звено исполнительного органа выполнено из телескопических секций, одна из которых шарнирно установлена на выходном валу привода и связана с ним через упругий элемент, а другая секция кинематически связана с выхоДнцм валом того же привода через механизм преобразования, причем упругий элемент выполнен с возможностью регулировки его жесткости.
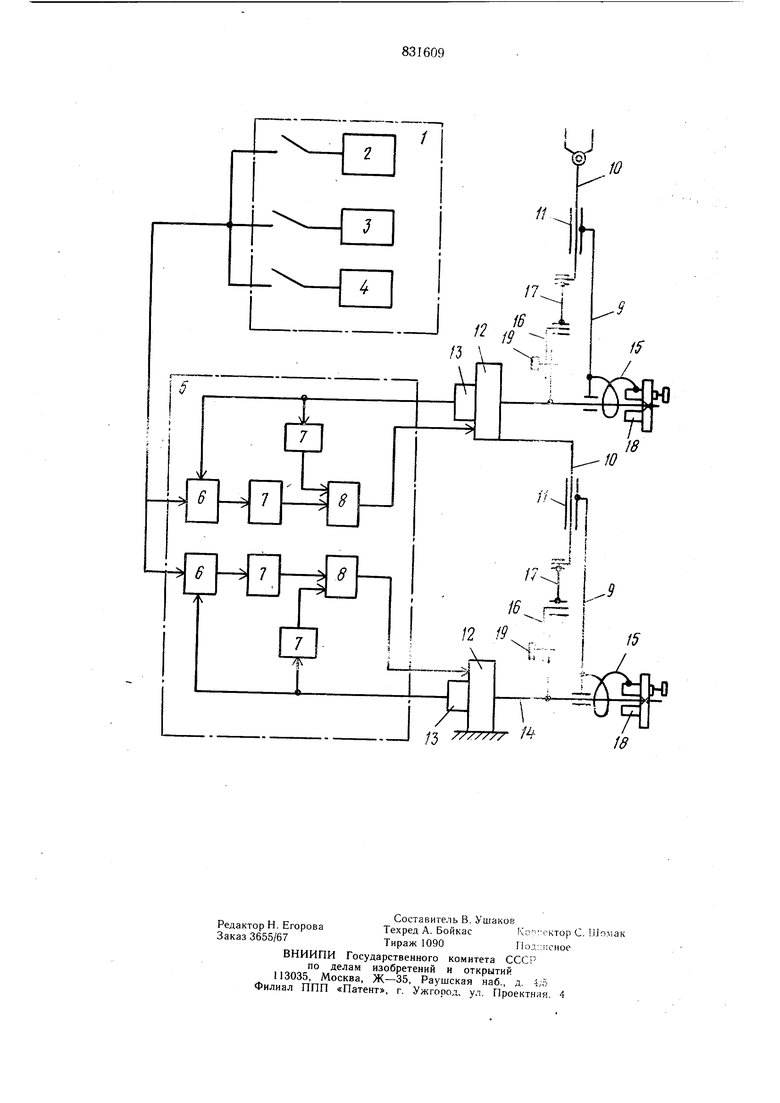
На чертеже схематически изображено моделирующее устройство исполнительного органа робототехнической системы.
Устройство состоит из задающей установки 1, содержащей програм,мное устройство 2, электронно-вычислительную машину 3 и органы 4 управления, например орган копирующего типа, и рукоятку. Кроме того, имеется блок 5 управления приводами, содержащий элементы 6 сравнения, корректирующие устройства 7 « управляющие усилители 8, исполнительный орган, содержащий последовательно соединенные вращательными парами жесткие звенья, выполненные в виде телескопически смонтированных секций 9 И 10, имеющих возможность возвратно-поступательно О перел;е;;им:;1И /ij vjотносительно дру1а но nanpiio.iHiuiUii.M 11 секций 9. Устройство имеет 1риводы 12 и информационные датчики 13. Секции 9 установлены шарнирно на выходных валах 14 приводов 12 и кинематически связаны с ними через упругие элементы 15, а секции 10 кинематически связаны с выходными валами 14 ириводов 12 через ме санизмы преобразования вращательного движения в возвратно-иоступательное, например, через кривошипно-шатунные механизмы, состоящие из кривощипов 16 и щатунов 17. Упругие элементы 15 снабжены регулировочными устройствами 18, изменяющими жесткость этих элементов, а кривощипы 16 снабжены регулировочными устройствами 19.
Устройство работает следующим образом.
Прч1 воздействии управляющего сигнала, сформированного задающей установкой 1 и блоком 5 управления приводами, выходной вал 14 привода 12 поворачивается по требуемому закону. В переходных режимах закон поворота телескопически соединенных секций 9 и 10 отличается от закона поворота выходного вала 14 вследствие деформации упругого элемента 15 под воздействием сил инерции секций 9 и 10. Поскольку кривощип 16 жестко соединей с выходным валом 14, то и его угловое положение относительно оси вращения также не совпадает с угловым положением секции 9 в переходных режимах, что вызывает синхронно с поворотом и продольные перемещения секции 10 в направляющих 11 секции 9. Таким образом, в переходных режимах жесткое звено исполнительного органа моделирующего устройства соверщает колебательные повороты относительно выходного вала с одновременным изменением собственной длины. Это соответствует движениям концов упругих звеньев исполнительного органа проектируемого манипулятора. Посредством регулирующих устройств 18 и 19 изменяют соответственно жесткость упругого элемента 15 и длину продольного хода секции 10 с целью задания требуемых динамических и статических характеристик исполнительного органа моделирующей установки.
Формула изобретения
Моделирующее устройство исполнительного органа робототехнической системы, содержащее пульт управления, блок управления и исполнительный орган, имеющий ряд последовательно соединенных звеньев, приводов и информационных датчиков, отличающееся тем,что, с целью повышения точности определения технических характеристик робототехнических систем с учетом упругости их звеньев, оно снабжено упругим, элементом и механизмом преобразования вращательного движения в возвратно-поступательное, хотя бы одно звено исполнительного органа выполнено из телескопических секций, одна из которых шарнирно установлена на выходном валу привода и связана с ним через упругий элемент, а другая секция кинематически связана с выходным валом того же привода через механизм преобразования, приче.м упругий элемент выполнен с возможностью регулировки его жесткости.
Источники информации, принятые во внимание при экспертизе 1. Кулешов В. С. и Лакота Н. А. Динамика систем управления манипуляторами. М., «Энергия, 1971, с. 22-27.
/3
18
