I
Изобретение относится к машино- строению, в частности к механическим комбинированным передачам и может быть использовано в устройствах автоматики.
Известен реверсивный механизм с автоматическим переключением, содержащий корпус, размещенные в нем йеДУ1ЦНЙ вал с жестко закрепленной на нем конической шестерней, ведомый вал, установленный перпендикулярно ведущему, муфту сцепления, включающую двустороннюю полумуфту, расположенную на ведомом валу с возможностью возвратно-поступательного перемещения вдоль него, механизм переключения, выполненный в виде плоского кулачка с односторонней рабочей поверхностью и закрепленный на торце одного из колес, подпружиненный в сторону кулачка ползун с выступом, взаимодействующим с кулачком, и ползун свободно установлен на ;двусторонней полумуфте с возможностьюпоступательного перемещения в корпусе вдоль оси ведомого вала, два конических зубчатых колеса, свободно установленных на ведомом валу с возможностью периодическрго взаимодействия с ним посредством механизма переключения и муфты сцепления .
Недостатками известного механизма являются его узкие кинематические возможности, обусловленные тем, что реверсирование ведомого вала может осуществляться как максимум через три с иебольщим оборота ведущего вала, так как максимально возможное передаточное число одноступенчатой конической передачи не должно превышать 6,3. Но при зтом габариты конической передачи и следовательно реверсивного механизма, где она применяется в данном случае, очень силоно возрастают.
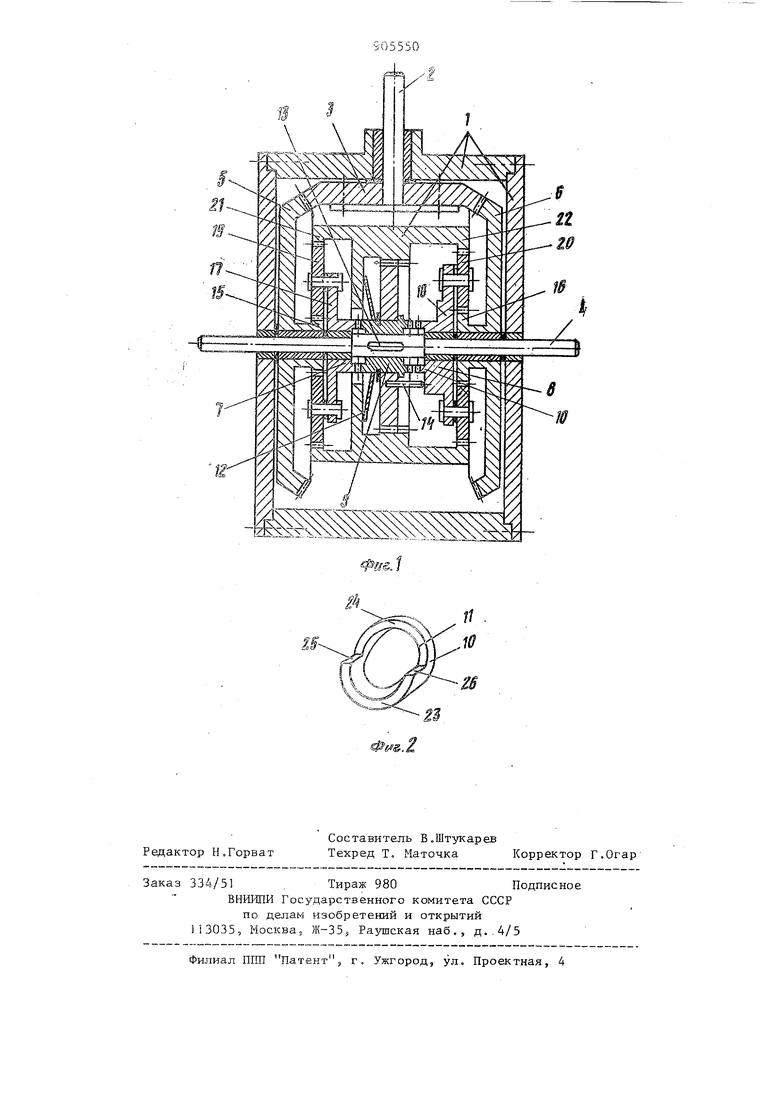
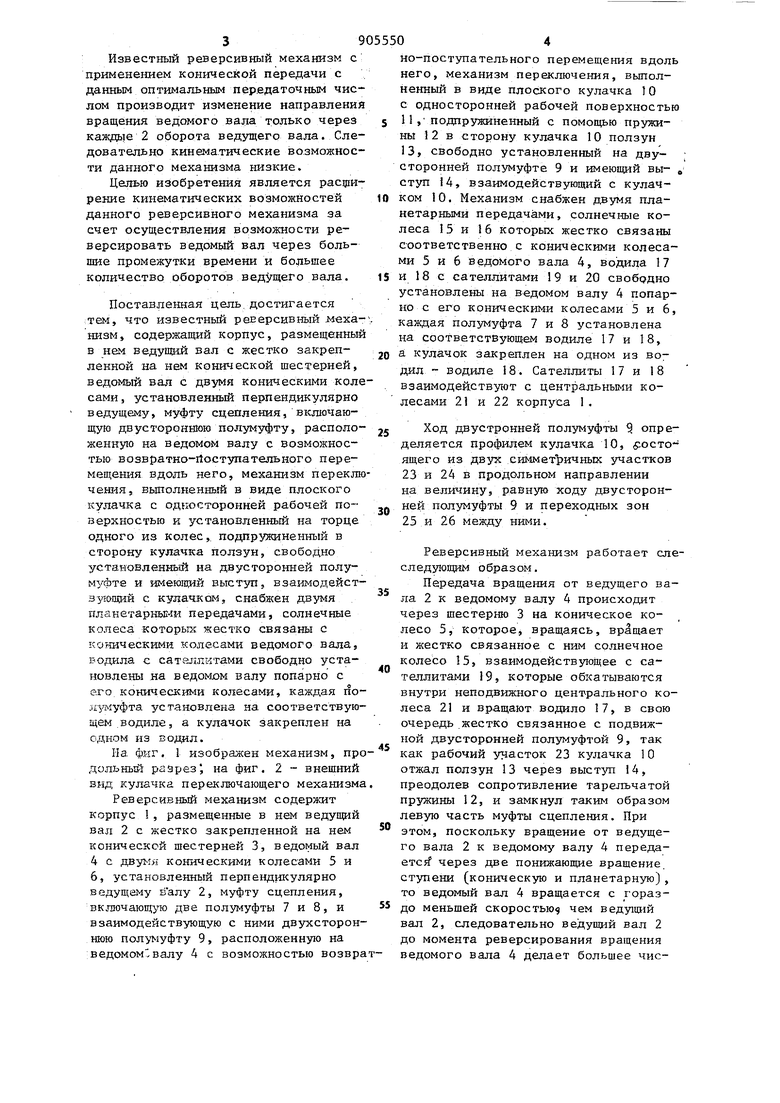
Рексмендуется передаточное число одноступенчатой конической передачи не брать больше 4. 39 ИзвестньЕй реверсивный механизм с применением конической передачи с данным оптимальным передаточным числом производит изменение направления вращения ведомого вала только через казвдь е 2 оборота ведущего вала. Следовательно кинематические возможности данного механизма низкие. Целью изобретения является расширение кинематических возможностей данного реверсивного механизма за счет осуществления возможности реверсировать ведомый вал через большие промежутки времени и большее количество оборотов ведущего вала. Поставленная цель, достигается :тем, что известный реверсивный м-еханизм, содержащий корпус, размещенный в нем ведущий вал с жестко закрепленной на нем конической шестерней, ведомый вал с двумя коническими коле сами, установленный перпендикулярно ведущему, муфту сцепления,включающую двустороннюю ползда|уфту, расположенную на ведомом валу с возможностью возвратно-йоступательного перемещения вдоль него, механизм переклю чения, выполненный в виде плоского кулачка с одкосторонней рабочей поверхностью и установленный на торце одного из колес,. подпружиненный в сторону кулачка ползун, свободно установленный на двусторонней полумуфте и имекиций выступ, взаимодейстз-у аощй с кулачком, снабжен двумя планетарны1-1И передачами, солнечные колеса которых жестко связаны с когшческими колесами ведомого вала, водила с сателлитами свободно установлены на ведомом валу попарно с его коническими колесами, каждая по Л5ч 5уфта установлена на соответствующем.водиле, а кулачок закреплен на одном из вода1л. На. фиг, 1 изображен механизм, пр дольный раэрез, на фиг. 2 - внещний вид кулачка переключающего механизм Реверсивный механизм содержит корпус 1, размещенные в нем ведущий вал 2 с жестко закрепленной на нем конической шестерней 3, ведомый вал 4 с коническими колесами 5 и 6, установленный перпендикулярно ведуп ему валу 2, муфту сцепления, включающую две полумуфты 7 и 8, и взаимодействующую с ними двухсторон нюю полумуфту 9, расположенную на ведомомвалу 4 с возможностью возвр но-поступательного перемещения вдоль него, механизм переключения, выполненный в виде плоского кулачка 10 с односторонней рабочей поверхностью П, подпружиненный с помощью пружины 12 в сторону кулачка 10 ползун 13, свободно установленный на двусторонней полумуфте 9 и имеющий вы- в ступ 14, взаимодействующий с кулачком 10. Механизм снабжен двумя планетарными передачами, солнечные колеса 15 и 16 которых жестко связаны соответственно с коническими колесами 5 и 6 ведомого вала 4, водила 17 и 18 с сателлитами 19 и 20 свобрдно установлены на ведомом валу 4 попарно с его коническими колесами 5 и 6, каждая полумуфта 7 и 8 установлена на соответствующ-ем водиле 17 и 18, а кулачок закреплен на одном из водил - водиле 18. Сателлиты 17 и 18 взаимодействуют с центральными колесами 21 и 22 корпуса 1. Ход двустронней полумуфты 9 определяется профилем кулачка 10, ростоящего из двух симметричных участков 23 и 24 в продольном направлении на величину, равную ходу двусторонней полумуфты 9 и переходных зон 25 и 26 между ними. Реверсивный механизм работает слеследующим обра.зом. Передача вращения от ведущего вала 2 к ведомому валу 4 происходит через шестерню 3 на коническое колесо 5, Которое вращаясь, вращает и жестко связанное с ним солнечное колесо 5, взаимодействующее с сателлитами 19, которые обкатываются внутри неподвижного центрального колеса 21 и вращают водило 17, в свою очередь.жестко связанное с подвижной двусторонней полумуфтой 9, так как рабочий участок 23 кулачка 10 отжал ползун 13 через выступ 14, преодолев сопротивление тарельчатой пружины 12, и замкнул таким образом левую часть муфты сцепления. При этом, поскольку вращение от ведущего вала 2 к ведомому валу 4 передаeTcrf через две понижающие вращение, ступени (коническую и планетарную), то ведомый вал 4 вращается с гораздо меньшей скоростью чем ведущий вал 2, следовательно ведупщй вал 2 до момента реверсирования вращения ведомого вала 4 делает большее число оборотов, чем в известном устройстве .
При дальнейшем вращении ведущего вала 2 рабочая дорожка 23 кулачка 10 обегает по выступу 14 До тех пор, пока последний под действием тарельчатой пружины 12 через переходную зону, например, зону 25 не перейдет на рабочую дорожку 24, т.е. Произойдет размыкание левой части муфты сцепления и последующее замыкание правой ее части с водилом 18.
А поскольку колеса 5 и 6 вращаются в противоположных направлениях,
и планетарные ступени обеих ветвей
о
механизма одинаковые кинематические свойства, то и ведомый вал 4 меняет свое направление вращения на противоположное.
При дальнейшем однонаправленном вращении ведущего вила 2 выступ 14 со временем доходит до взаимодейстВИЯ с.переходной зоной 26 и выходит через нее снова на рабочий участок 23, при этом ПОЛЗУН 13, преодолев сопротивление пружины 12, отходит Влево, освободив от зацепления правую часть двусторонней полумуфты 9 с с водилом 18 и замыкает левую ее часть с водилом 17, т.е. вновь происходит изменение направления вращения ведомого вала 4.
Дальнейший процесс работы происходит аналогично. Закон реверсирования определяется передаточным отношением в конической и планетарной ступени каждой из ветвей механизма. При большом передаточном отношении данных ступеней в устройстве ведомый вал 4 периодически изменяет свое направление вращения через больщие Промежутки в земени, что расширяет кинематические возможност предложенного механизма по сравнению с известным, реверсирование вращения ведомого вала 4 которого происходит через малые промежутки времени. Кроме того, планетарные ступени в каждо из ветвей механизма могут быть выпол нены отличными друг от друга (фиг.О т.е. могут иметь различные передаточные отношения.
Это позволяет ведомому валу 4 вращаться в одном направлении со скростью, отличной от его скорости врщения в обратном направлении за одинаковое время, при этом ведущий вал 2 совершает разные числа своих оборотов, что также расширяет кинематические свойства реверсивного механизма.Габариты реверсивного механизма при этом не увеличиваются, поскольк они определяются размерами конических колес 5 и 6, такими же как и в известном механизме.
Формула изобретения
Реверсивный механизм с автоматическим перекл50чением, содержащий корпус, размещенные в нем ведущий вал с жестко закрепленной на нем конической шестерней, ведомый вал с двумя коническими колесами, установленный перпендикулярно ведущему, муфту сцепления, включающую- две полумуфты и взаимодействующую с ним двустороннюю полумуфту, расположенную на ведомом валу с возможностью возвратно-поступательного перемещения вдоль него, механизм переключения, вьшолненный в виде плоского кулачка с односторонней рабочей поверхностью, и установленный на торц одного из колес подпружиненный в сторону кулачка ползун, свободно ycтa ioвлeнный на .двусторонней полумуфте и имeюш й выступ, взаимодействующий с кулачком, отличающ и и ся тем, что, с целью расширения кинематических возможностей, он снабжен двумя пЛанетарными передачами, солнечные колеса которых жестко связаны с коническими колесами ведомого вала, водила с сателлитами свободно установлены на ведомом валу попарно с его коническими колесами, каждая полумуфта установлена о на соответствующем водиле, а кулачок закреплен на одном из водил.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 2652475/28, кл. F. 16 Н 21/08,. 1978 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивное устройство с автоматизированным переключением | 1978 |
|
SU765574A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ | 2007 |
|
RU2347965C1 |
| Реверсивное устройство с автоматизированным переключением | 1980 |
|
SU889976A1 |
| РЕВЕРСИВНАЯ ПЕРЕДАЧА | 1994 |
|
RU2114344C1 |
| ВАРИАТОРНЫЙ ПРИВОД МОБИЛЬНОЙ МАШИНЫ | 2002 |
|
RU2205110C1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| РЕВЕРСИВНЫЙ ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ВАРИАТОР | 1993 |
|
RU2068133C1 |
| Коробка привода рабочих органов кормоуборочного комбайна | 1990 |
|
SU1782428A1 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР | 2001 |
|
RU2204749C1 |
| Манипулятор | 1987 |
|
SU1465300A1 |