(54г) ОГРАНИЧИТЕЛЬ ПЕРЕКОСА МОСТОВОГО КРАНА
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО ТИПА | 1993 |
|
RU2061645C1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| Органичитель перекоса крана мостового типа | 1976 |
|
SU611857A1 |
| МОСТОВОЙ КРАН | 2004 |
|
RU2279397C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| Способ управления перекосом мостового или козлового крана | 2022 |
|
RU2783317C1 |
| Мостовой кран | 2023 |
|
RU2820482C1 |
| Привод механизма перемещения опор мостового крана | 1985 |
|
SU1321661A1 |
| Ограничитель перекоса мостового крана | 1977 |
|
SU691381A1 |
1
Изобретение отгносится к подъемно-транспортному машиностроению, а именно к ограничителям перекоса крана и может быть использовано для крупногабаритных автооператоров мостового типа гальванических линийИзвестен ограничитель перекоса мостового крана, содерз«ащий датчики положения колес относительно рельса, расположенные по диагонали, выходы которых соединены параллельно друг с другом и включены 8 схему управления соответствующего привода .механиз.ча передвижения крана 1.
Однако в известном устройстве датчики контро.лируют перекос колес относительно рельса только одкой концевой балки, в то время как перекос колес другой концевой балки может быть больше контролируемого перекоса. Кроме того, когда кран смещается 8 одну сторону без перекоса, датчики срабатывают одновременно и схема управления двигателям механизмов передвижения находится в неопределенном состоянии. Все это снижает -ЕЮЧНОСТЬ контроля и надежность работы ограничителя.
Цель изобретения - повыщение точности контроля и надежности работы ограничителя и расширение функциональных возможностей.
Поставленная цель достигается тем, что датчики установлены на концевых балках крана и каждый из них выполнен в виде группы бесконтактных путевых конечных выключателей, . ступенчато разнесенных в горизонтальной плоскости вдоль рельса, причем чувствительная часть их установлена перпендикулярно продольной оси рельса.
Кроме того, ограничитель перекоса снабжен боковым датчиком, установленным на средней части каждой концевой балки с возможностью взаимодействия с боковой
15 кромкой рельса.
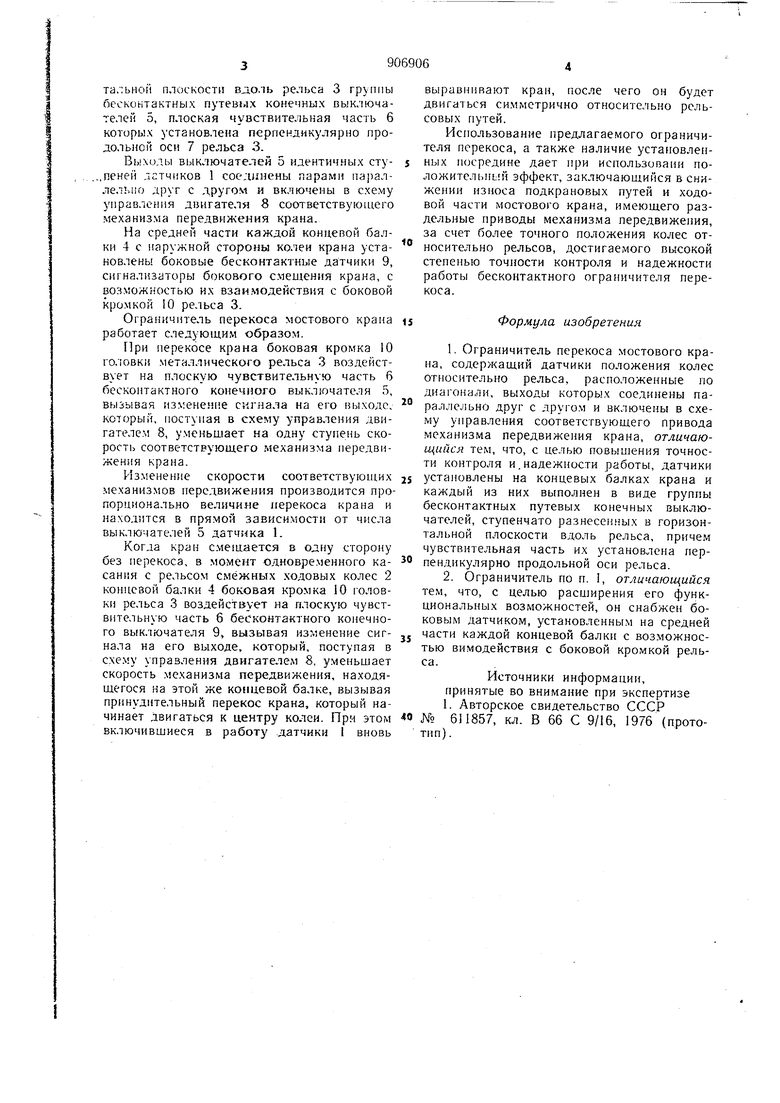
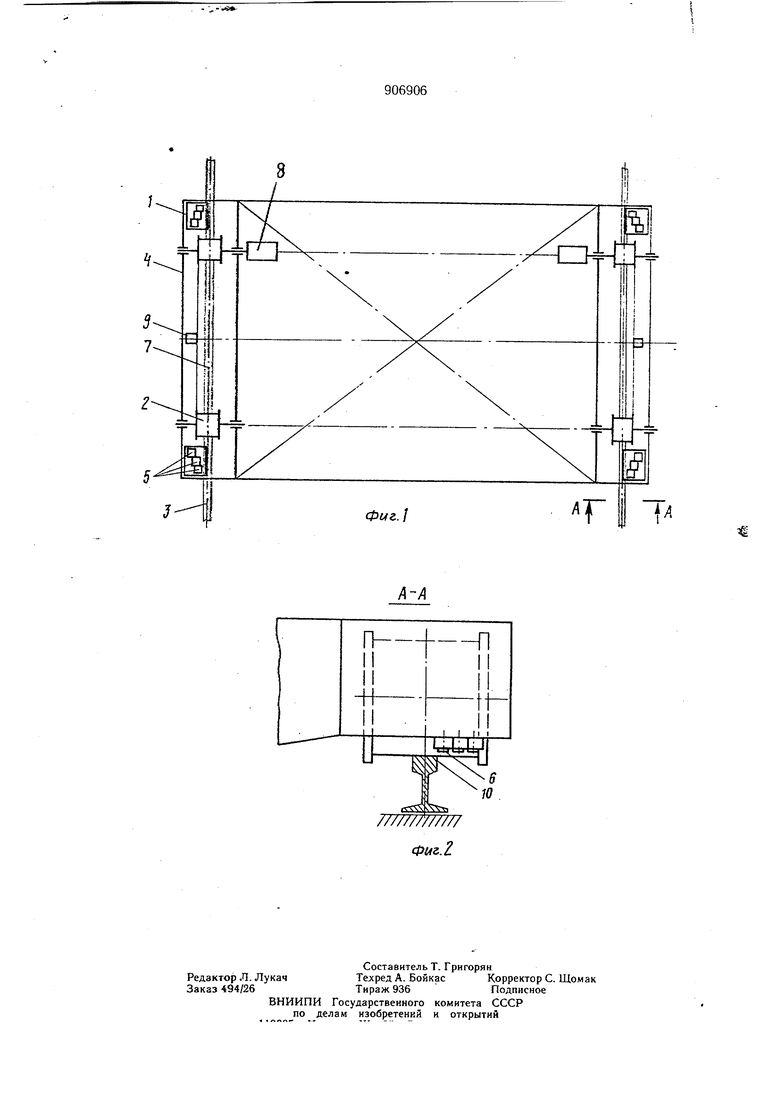
На фиг. 1 показан ограничитель перекоса, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Ограничитель перекоса мостового крана 20 содержит датчик 1 полох:ения колес 2 относительно рельсов 3. Датчики 1, расположенные по диагонали, установлены на двух концевых балках 4 и каждый из них выполнен в виде ступенчато разнесенных в горизонта.;ьной плоскости вдоль рельса 3 группы бесконтактных путевых конечных выключателей 5, плоская чувствительная часть 6 которых установлена перпендикулярно продольно и оси 7 рельса 3.
Выходы выключателей 5 идентичных сту,,пеней летчиков 1 соединены парами паралле.) друг с другом и включены в схему
управления двигателя 8 соответствующего
механизма передвижения крана.
На средней части каждой концевой балки 4 с наружной стороны колеи крана установлены боковые бесконтактные датчики 9, сигнализаторы бокового смешения крана, с возможностью их взаимодействия с боковой кромкой 10 рельса 3.
Ограничитель перекоса мостового крана работает следующим образом.
При перекосе крана боковая кромка 10 головки металлического рельса 3 воздействует на плоскую чувствительную часть 6 бесконтактного конечного выключателя 5, вызывая изменение сигнала на его выходе, который, поступая в схему управления двигателем 8, уменьшает на одну ступень скорость соответствующего .механизма передвижения крана.
Изменение скорости соответствующих .механизмов передвижения производится пропорциональ.но величине перекоса крана и находится в пря.мой зависимости от числа выключателей 5 датчика 1.
Когда кран с.мещается в одну сторону без перекоса, в момент одновременного касания с рельсом смежных ходовых колес 2 концевой балки 4 боковая кромка 10 головки рельса 3 воздействует на плоскую чувствительную часть б бесконтактного конечного выключателя 9, вызывая изменение сигнала на его выходе, который, поступая в схему управления двигателем 8, уменьшает скорость механизма передвижения, находящегося на этой же концевой балке, вызывая принудительный перекос крана, который начинает двигаться к центру колеи. При этом включившиеся в работу датчики 1 вновь
выравнивают кран, после чего он будет двигаться си.мметрично относительно рельсовых путей.
Использование предлагаемого ограничителя перекоса, а также наличие установленных посредине дает при использоваии положительцЕ; н эффект, заключающийся в снижении износа подкрановых путей и ходовой части мостового крана, имеющего раздельные приводы механизма передвижения, за счет более точного положения колес относительно рельсов, достигаемого высокой степенью точности контроля и надежности работы бесконтактного ограничителя перекоса.
Формула изобретения
установлены на концевых балках крана и каждый из них выполнен в виде группы бесконтактных путевых конечных выключателей, ступенчато разнесенных в горизонтальной плоскости вдоль рельса, причем чувствительная часть их установлена перпендикулярно продольной оси рельса.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
№ 611857, кл. В 66 С 9/16, 1976 (прототип).
IIIII
/////////////
Фиг.2
